基于STM32和ARM Cortex-A8平台的自清扫智能小车设计
2018-09-04 16:36任金波施火结
制造业自动化 2018年8期
任金波,张 翔,施火结
(1.福建农林大学 机电工程学院,福州 350002;2.重庆大学 机械工程学院,重庆 400044)
0 引言
近年来,随着经济的发展和生活水平的提高,人们对路面的铺装要求越来越高,尤其是广场、公园、庭院、小区等道路,广泛使用大理石、花岗岩、砂石、混凝土砖及其他材料铺装路面,沿路面两侧边缘常设有排水槽,因排水槽宽度和高度较小,受落叶、石粒、杂草等影响经常容易堵塞,给排水带来严重影响,而清理时又极为困难,目前主要靠人工手工清理作业,劳动强度大,如能以自动清扫设备进行作业,将能显著提高清理效率,降低劳动强度。本文提出一种基于STM32和ARM Cortex-A8平台的自清扫智能小车,能在以大理石、花岗岩、混凝土砖等进行铺装的路面对边缘排水槽进行清扫,清扫时可对路面和排水槽进行精确定位,自动控制毛刷盘位置来配合小车的行走动作,沿排水槽自动完成清扫作业。
1 系统总体设计
1.1 功能设计
路面边缘排水槽如图1所示,宽度约42mm,高度约16mm,常有落叶、淤泥、石粒等落入其中造成堵塞,基于STM32和ARM Cortex-A8的自清扫智能小车,通过安装于底盘前后端的摄像头采集路面图像,并进行路径检测以指导行走机构运动,左右端的摄像头采集排水槽图像,在控制模块作用下,清扫小车在尺寸较规整的路面上对边缘排水槽进行清扫。控制模块内置包括STM32单片机在内的计算芯片,当小车工作时,计算芯片以小车初始位置为原点,以收到的ARM Cortex-A8平台传送的路面图像为刻度,记录小车的行走轨迹,并在转弯处或交叉处判断转向以免重复之前的路径;行走机构根据路面图像信息处理结果实时调整行进路线,以使毛刷盘对准排水槽进行清扫,当行走机构转弯、倒退或暂停时,升降单元提升毛刷盘使之离开缝隙以免受损。

图1 路面边缘排水槽
1.2 机械结构设计
自清扫智能小车的结构如图2所示。包括图像识别与路径检测装置、清扫装置、回收装置、控制模块、行走机构、状态显示屏等。控制模块与行走机构、图像识别与路径检测装置、清扫机构等相连并加以控制;图像识别与路径检测装置包括位于前后、左右的摄像头和图像处理单元;清扫机构包括升降单元和竖向设置的毛刷盘;行走机构以两个独立的驱动电机驱动后轮行走,当控制模块改变电机的转速、转向时,小车转弯、倒退,并根据图像识别与路径检测装置检测的路径走向调整行进路线,以使毛刷盘对准排水槽进行清扫;回收装置包括进风口、风叶、滤尘装置和出风口,风叶设于进风口处,进风口的进风面朝向毛刷盘,滤尘装置设于出风口处;小车前方还设有状态显示屏和USB接口,以便于读取、提取工作数据。
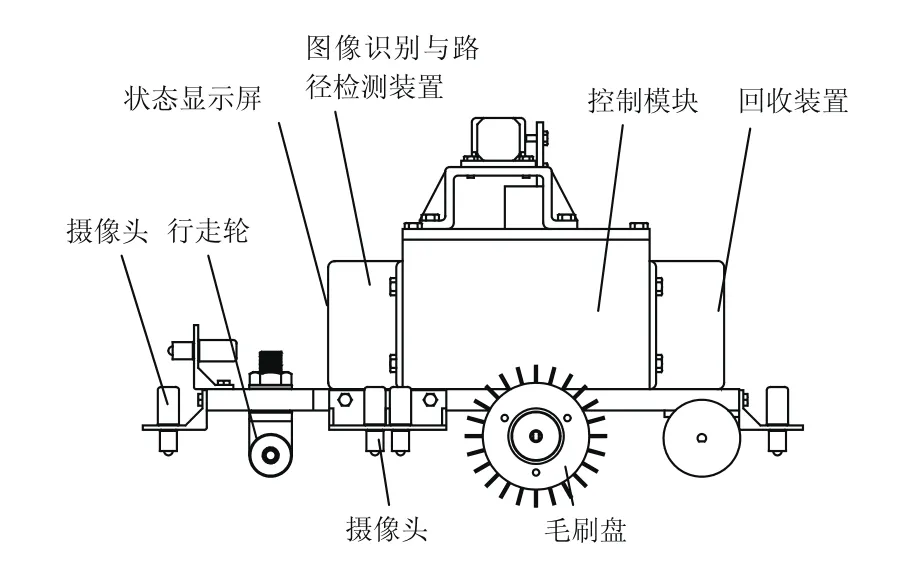
图2 自清扫智能小车
2 控制系统硬件设计
图3所示为系统硬件结构设计,含有处理器、ARM Cortex-A8处理单元、图像采集单元、显示模块等。其中ARM Cortex-A8图像处理单元是自清扫小车的核心装置,通过处理平台i.MX6完成,该处理平台结构紧凑,装置轻便,易嵌入到小车结构中,可替代传统PC处理机,并具有实时显示的功能,得到图像处理的参数传给微控制单元,从而控制小车运动。
2.1 处理器
微处理单元使用STM32F100R8单片机,用于控制ARM Cortex-A8图像处理单元通过外围电路传输的参数,从而实时控制小车的行走路径;并通过驱动电路、清扫控制电路、集尘装置电路等控制小车的行走、清扫和集尘功能。
2.2 ARM Cortex-A8处理单元
ARM Cortex-A8处理单元对路面和边缘排水槽图像进行运算、分析,获得对目标路径的方位信息,提取出路径的拟合点,导航线信息,并进行导航偏角和偏移量的参数计算,为自动行走导航和自清扫提供信息。
2.3 图像采集单元
图像采集单元通过CMOS图像传感器将光信号转成电信号后,再经视频转换芯片TVP5150AM1将图片的模拟信号转成数字信号,最后将经信号处理后的数据传出。
2.4 显示模块
图像显示单元由TFT-LCD液晶显示屏组成,TFTLCD是一种常用的液晶屏种类,具有较高的液晶显示成像质量,可实时显示由图像处理单元获取的图像路径信息。
2.5 程序编译模块
程序编译主要是在PC机上完成程序编写并进行程序到开发板的移植。在Visual Studio 2010平台进行程序的开发,通过Arm-linux-gcc完成程序的交叉编译,并进行移植。
3 控制系统软件设计
控制系统程序流程如图4所示,系统初始化后进行控制模式选择,以确定是自动还是手动模式;如自动清扫,首先确定工作起始位,并以此作为坐标原点,把小车移至坐标原点处,摄像头开始采集图像信号并进行分析和路径识别,小车启动后毛刷开始对排水槽进行清扫,并将垃圾收集到回收装置中。前进过程中,发现偏航时向控制模块发送偏航感知信息,从而控制行走机构使小车恢复正确行进路线;当小车运行路径前方有墙体或障碍物时,前部的障碍物传感器向控制模块发送碰撞告警,使控制模块控制行走机构停止或转向;计算芯片以清理装置初始位置为原点,以收到的图像感知信息为刻度,记录清理装置的行走轨迹,并在路面交叉处判断转向以免重复之前的路径。
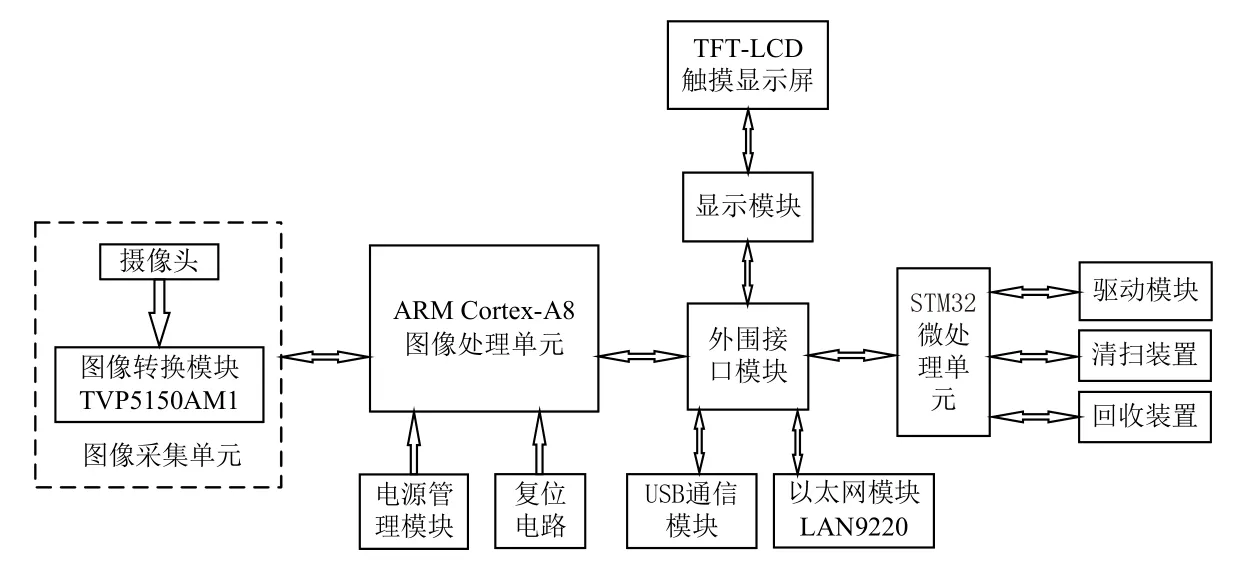
图3 自清扫智能小车总体设计框图
4 实验仿真
4.1 图像处理
4.1.1 路面图像采集
图像采集即自清扫智能小车在路面上拍摄图像的过程,图像采集应尽可能丰富,采集到平整、交织、阻碍等各因素干扰下的多幅图像。
4.1.2 图像灰度化
计算机图像处理常采用RGB和HSV两种模型。RGB模型是基于人类视觉的三原色——红(R)、绿(G)、蓝(B)理论建立的色彩空[1];HSV(Hue, Saturation,Value)是根据颜色的直观特性由A. R. Smith在1978年创建的一种均匀颜色空间,反映了人的视觉对颜色的感觉[2]。RGB图像不利于系统的实时采集,一般对颜色空间的图像进行有效处理都是在HSV空间进行的,因此,需要将采集到的路面RGB模型图像转换为HSV颜色模型,然后通过调节HSV空间的S分量实现图像的灰度化[3,4]。
4.1.3 图像二值化分割不同特征
图像二值化阈值选取通常采用双峰法、P参数法、Otsu算法、最大熵阈值法、迭代法(最佳阈值法)、均匀性度量算法、聚类法等[5]。其中,Otsu算法由于在图像处理过程中计算简单,且不受色调等其他因素影响,在图像处理中经常采用。因此,对路面灰度化操作完成的图像使用Otsu算法进行二值化处理。
4.1.4 滤波(突出路面特征)
路面图像二值化处理后,会出现许多噪声成分,影响后续特征点的提取,需对图像进行滤波操作,图像有很多滤波方法,如非线性滤波、中值滤波、形态学滤波等[6]。形态学滤波器是近年广泛采用的一类重要非线性滤波器,一般使用二值图像进行边界提取、骨架提取、孔洞填充、角点提取、图像重建;主要依靠膨胀腐蚀,开启操作,闭合操作等几种算法进行组合来实现一些非常复杂的功能。综合考虑后,本文采用面积法结合形态学滤波对二值化后的路面图像进行滤波操作。

图4 控制系统程序流程图
4.1.5 提取拟合点
路面结构错综复杂,受落叶、石粒、杂草等其他因素干扰较多,图像处理中提取路面特征算法也较为繁琐,本文提出一种简单有效的算法,具体过程为:构造出一空表矩阵,分成四行,从矩阵的1/4、2/4、3/4、4/4行依次扫描图像,以0、1表示像素的图像位置,左右分别记录,最后找到突变点坐标中间值,该值即为所需的路面路径中间拟合点。
4.1.6 提取路面上的导航路径
霍夫变换于(Hough Transform)1962年由Paul Hough次提出[7],后于1972年由Richard Duda和Peter Hart推广使用[8],是图像处理中的较为广泛应用的一种特征提取技术,将经过算法提取到的系列特征点经霍夫变换后,可得自清扫小车在路面上自主行走清扫时的导航路径。
4.2 图像处理仿真
为验证自清扫智能小车能否实现在路面上自动导航行走,选取了图5所示的两幅路面图像进行仿真处理,图5(a)为弯曲路面,图5(b)为直线路面。图6为两幅图像处理完成后的特征点和路径检测图像,图中较细曲线为提取的系列特征点,粗线条为特征点经霍夫变换后得到的自主行走导航路径。从仿真图可以看出,路面较平直时,特征点和导航路径吻合性较高,基本保持重合;路面有弯道时,特征点和导航路劲不重合,需实时调整导航路径,以满足自清扫小车沿路面行走作业,毛刷盘根据左右端摄像头采集的排水槽图像实时调整动作,以完成清扫作业。图像识别与路径检测装置处理两幅像素500×360的图像分别耗时为0.085s、0.079s,平均耗时0.082s,表明图像处理速度快,可满足路径导航实时性要求。

图5 路面图像

图6 特征点与路径检测图像
4.3 稳定性仿真
自清扫智能小车行走作业时,质心的变化能够反映出其在运行中的稳定性问题,如质心波动比较大,则稳定性较差。为验证自清扫小车的稳定性,选取波浪纹防滑型混凝土地砖路面作为仿真行走基体,路面上波浪纹的最大圆弧半径为4mm,仿真得到小车质心运动参数随时间变化曲线如图7所示,(a)~(c)分别为质心位移、速度、加速度随时间变化曲线(注:X轴指向前进方向,Y轴指向高度方向,Z轴指向宽度方向)。小车在路面前进过程中,由于Z轴方向上的运动学参数变化很小,几乎呈直线状,图中予以忽略。从图7中可以看出,小车在运动至第9s左右时前轮开始越过波浪纹圆弧,此时X、Y方向上的速度和加速度曲线会发生较大的波动,且出现峰值,但X、Y方向上质心位移的变化仍然相对平缓,没有出现各种突变现象,可知小车在越过波浪纹路面时,仍能保持运动稳定,从而正常作业。
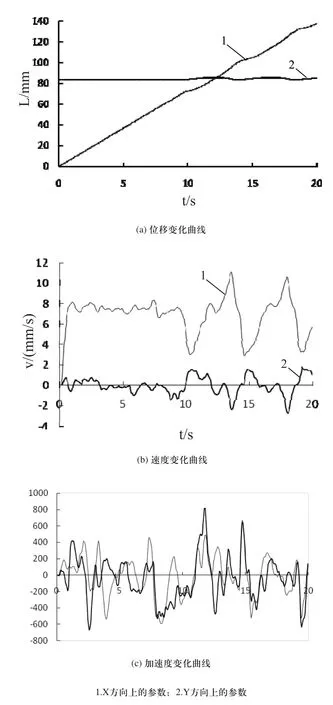
图7 稳定性仿真曲线
5 结论
本文设计了一种基于STM32和ARM Cortex-A8平台的自清扫智能小车,并对其机械结构、控制系统硬软件进行了详细论述,最后进行了小车行走作业时的图像处理和运动稳定性仿真实验,路面图像经摄像头采集、灰度化、二值化、滤波、提取路径特征点和霍夫变换后,可成功得到路径导航线,算法快速准确,能在有障碍物或偏航时实时导航从而自动恢复正确行走路线,并能在较复杂路面运行时保持运动平稳,毛刷盘根据采集到的排水槽图像信息实时调整清扫动作,从而完成清扫作业,可以减轻路面两侧边缘排水槽清扫时的工作强度,提升工作效率,具有较好的应用前景。
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
现代营销·理论(2019年10期)2019-09-10
电子制作(2019年15期)2019-08-27
文苑(2018年22期)2018-11-19
电子制作(2018年18期)2018-11-14