
科教融合创新指导下的本科生实验项目开发
2018-09-04 12:38刘玉琳徐双满
实验技术与管理 2018年8期
刘玉琳, 徐双满, 霍 凯
(北京交通大学 机械工程实验中心, 北京 100044)
经过多年的探索和实践,高等学校的人才培养已经从单纯注重传授知识、强调课堂教学,转向注重培养学生的综合素质,尤其是实践能力和创新能力[1]。学生的实践能力和创新能力在科学研究的氛围中能得到很好的培养和提高[2],将科研成果转化为教学资源无疑是培养大学生创新能力的一种有效途径,是实现科教融合的关键[3],这也对本科教学中的实验教学环节提出了更高的要求。
我校机械工程实验中心承担着机电学院本科生实验教学任务,是培养学生实践能力和创新能力的重要基地。而当前的实验教学环节存在以下问题,如由于各学科技术快速发展,实验设备、实验手段相对落后;现有实验项目中培养学生实践创新能力的研究设计型实验项目比例偏少;教学内容包含范围广,实验设备种类、数量有限,不能很好地支撑课堂教学[4]。
目前,各高校通过多种途径加强本科生教育的实践环节,如大学生机械创新设计大赛、CCTV机器人大赛等全国性的赛事给本科生提供了一个利用所学知识进行自主设计、自主实践创新的平台,但这些实践机会无法实现对本科生的100%覆盖。如能将教师科研项目中的科研设备加以改造,开发适用于本科生的实验项目,让所有学生在本科教学环节接触到处于技术前沿的实验设备,不仅有利于学生理解课堂教学内容,对学生专业技能的培养及就业前景都将产生积极的影响[5]。
为了满足“机器人技术”系列课程大纲对工业机器人实验项目内容的需要,利用教师开展科研工作所取得的设备及成果开发高水平实验项目,使机器人技术系列课程实验教学内容体系更加完善。
1 科研设备成果与相关实验教学关系
1.1 科研设备成果与实验教学融合
机电学院机械工程实验中心科研团队多年来涉足轨道交通技术、航空航天等领域,在机电一体化设计及工业机器人应用方面取得了骄人的成绩,利用申报的纵向基金资助课题经费研制出如工业机器人喷涂系统、多关节机器人目标识别与目标捕捉等,这些设备在完成预定科研任务目标后,除了开展一些专题研究以外,大多数时间处于闲置的状态。因此,对于这些设备在开展科研活动之余面向本科生开放,有效地将这种结合学科或专业的内容融入本科实验教学中去,激发学生创新思维的形成,更好地培养学生的创新与创业能力[6]。因此,科研成果转化为教学有利于形成专业特色,提高专业竞争力,实现教学创新[7]。一些科研设备在完成了科研实验工作后,如能将其改造后应用于本科生实验教学,将提高设备利用率[8]。
目前,高校面向机械工程专业本科生开设有“机器人技术”“机器人控制技术”“机器人设计基础与实践”等与机器人相关的课程。实验教学设备方面由于受到投资方面的限制,一般硬件配备像“慧鱼机器人”及一般通用教学机器人,而真正代替人干活的工业机器人投入到实验教学中的却很少,而工业机器人在机器人理论课程内容里占有不小的比例。
1.2 构建机器人技术系列课程实验教学内容体系
传统机器人实验教学体系,一般分为2大模块,即认知与分析实验模块和示教控制实验模块。认知与分析实验模块主要包括:机器人机械本体分析、机械与传感控制单元认知与分析等内容;示教控制实验模块主要包括:控制软件编写、轨迹规划与示教动作调试等[9]。这些内容一般是基于实验专用设备的软硬件配置固化的一种模式,学生创新思维空间受到限制,学生难以接触高水平机器人实验内容。因此,增加工业机器人实验模块,为开发高水平综合设计型实验项目创造条件,使学生在学习机器人课程期间感受到工业机器人在实际生产中的神奇本领[10]。该实验模块主要包括:工业机器人的机械本体分析实验、工业机器人目标识别与追踪、工业机器人变曲面轨迹示较控制实验等实验中心科研团队依托科研项目经费购置或自制的机器人有知名品牌“六轴关节型工业机器人”“大行程直角坐标机器人”。可以填补本科生六轴关节型工业机器人及直角坐标型工业机器人实验教学内容的空白。设计“直角坐标机器人复杂轨迹规划及对象识别模块”向大学生机械创新设计大赛的学生开放,为学生提供一个自主设计自主创新的实践平台。
基于以上思路,对科研用实验设备进行了软、硬件升级,并设计了相关实验内容。
2 基于科研设备成果的实验项目开发
2.1 大行程直角坐标机器人实验项目
实验中心科研团队项目“大型复杂特种工件防热层自动喷涂装备关键技术研究”,可以完成对特种工件自动喷涂过程中喷涂轨迹规划及喷涂流量、喷枪移动速度、喷枪摆角等关键参数进行优化等工作。其中的主要设备是自制的三直线轴加两旋转轴框架式工业喷涂机器人(见图1)。该设备具有行程大、多自由度、末端手腕转动精巧、精度高等特点,可以开展复杂曲面形貌检测与喷涂、抓取工件等动作,可作为机械、传感、控制多学科融合的实践平台。

图1 直角坐标喷涂机器人
2.1.1 实验开发内容要点
(1) 认知分析与初始化实验。实验目的与内容要点:通过对机械结构与配置、传感器与控制硬件系统分析,了解并掌握框架式直角坐标机器人本体组成结构特点。学习半闭环控制驱动电机配置特点、大行程同步控制机构等内容。通过对控制系统软、硬件组成与配置认知与分析,了解并掌握该类机器人控制器运用特点。重点掌握半闭环控制精度、伺服减速电机、编码器设计选型等技术问题;学习机器人坐标原点与极限位置点传感器的设计与选型相关知识。
(2) 直线轴联动轨迹规划与控制。实验目的与内容要点:学习和掌握parker9000多轴运动控制器原理,学习实现XY平面或YZ平面两轴联动的轨迹控制方法;学习实现XYZ三轴联动的轨迹控制方法,进一步学习和掌握parker9000多轴运动控制器的使用方法,并可借助在CAD矢量坐标环境下规划好轨迹并取得关键点坐标值,编制示教控制程序,实现轨迹控制。
2.1.2 科研设备软硬件改造
科研设备功能先进、科技含量高,但不能直接用于本科生实验教学,需要进行软、硬件必要的开发工作,使其融入到实验教学中,并适应教学内容需要,在本科生实验教学环节发挥作用[11]。在设备改造过程中也进一步锻炼了教师的科研水平,实现了科研、教学互相促进互相融合[12]。
针对结构认知及控制模块,主要完成了各项实验的控制例程及控制界面的软件开发工作。针对复杂轨迹规划及对象识别模块,完成了机器人末端激光测距传感器的选购(见图2),并设计制造了激光传感器的安装胎具(见图3),在此基础上完成了基于末端测量的机器人三轴联动示例程序的编写。

图2 激光测距传感器
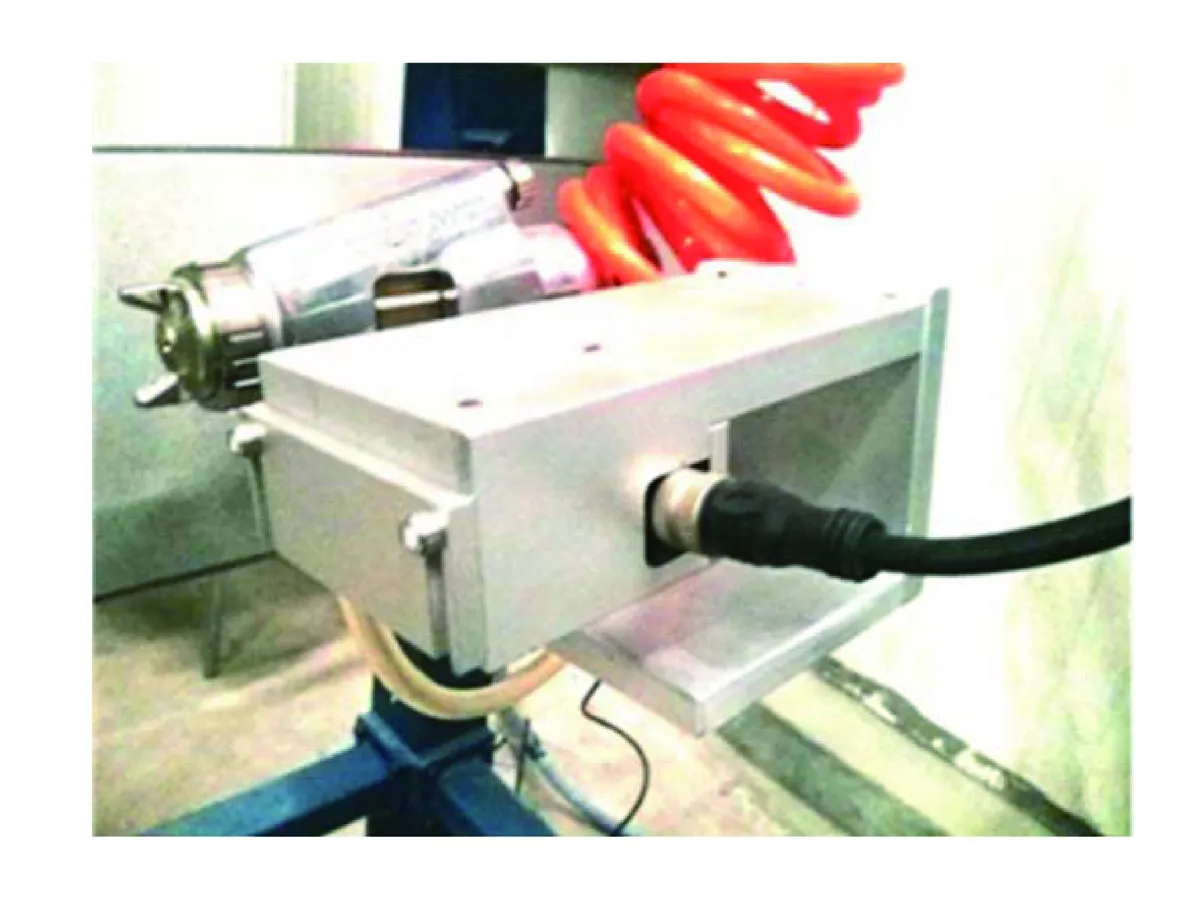
图3 激光测距传感器安装胎具
2.2 六轴关节型工业机器人系统实验开发
2.2.1 实验开发内容要点
(1) 工业机器人初始化与坐标系建立方法实验。实验目的与内容要点:了解多轴工业机器人系统组成、操作控制特点,学习机器人初始化参数设置,了解工业机器人的大地坐标系、工具坐标与用户坐标系特点,学习工具坐标系的建立方法。本实验项目侧重于工业机器人基础与基本技能训练方面,为进一步开展创新运用型实验打下良好基础。
工具坐标系的建立是工业机器人非常重要的一项初始化配置工作。如图4所示,将工具中心点(TCP,tool center point)设为零位,由此再定义工具的位置和方向。执行程序时,机器人就是将TCP移至编程位置。通过设置该中心点的偏移值,就可以定义一个新的工具坐标系。
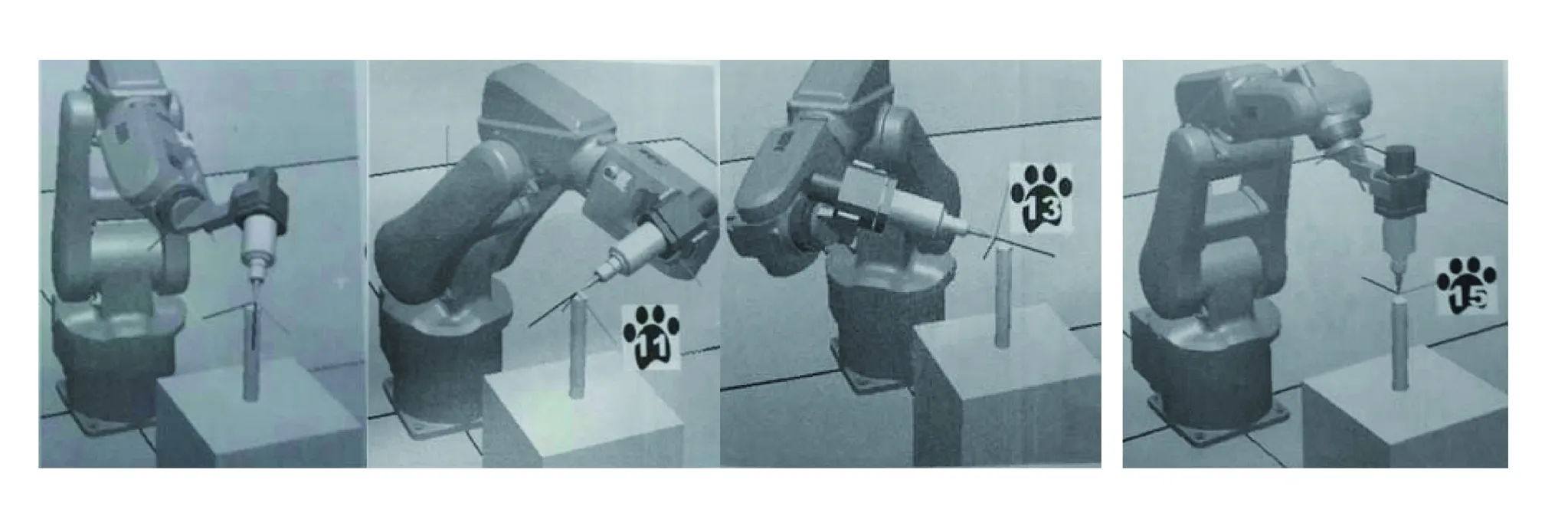
图4 多点法设置工具坐标原点过程示意图
(2) 工业机器人目标测量与追踪实验。实验目的与内容要点:重点了解工业机器人接口技术与外部设备信息交互功能,以工业相机为外部设备,图像是接收的信息,由计算机统筹控制,由机器人自动变量编程完成对目标的捕捉动作。对象为多边形(6边)识别与边长测量;骰子点数识别与检出等,如图5、6所示。
在一个随意摆放的骰子区域中,按点数规律的快速检出并要求摆放到相应的位置上。
2.2.2 软硬件配置与开发
六轴关节机器人工具坐标建立需要制作定义坐标的专用胎具,坐标点要求胎具的顶部为尖点。工业机器人目标测量与追踪实验需要配置与开发的内容和难度较大,需要配备的硬件有工业相机、专用光源装置、机械安装接口装置、真空吸盘、工控机,测量识别、接口链接、控制主程序等具备开展实验条件,学生在实验工程中要了解如何安装搭接成一个完整的实验功能系统,还要完成初始化的参数设置与选择,编制一些子程序等工作来开展实验,将动手操作、设计与调试等多环节工作综合在一起。
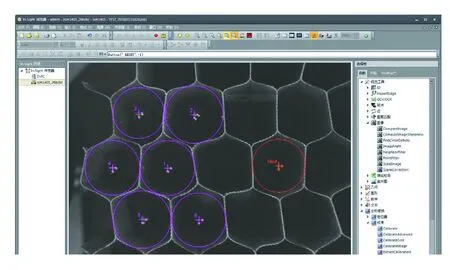
图5 任意六边形测量
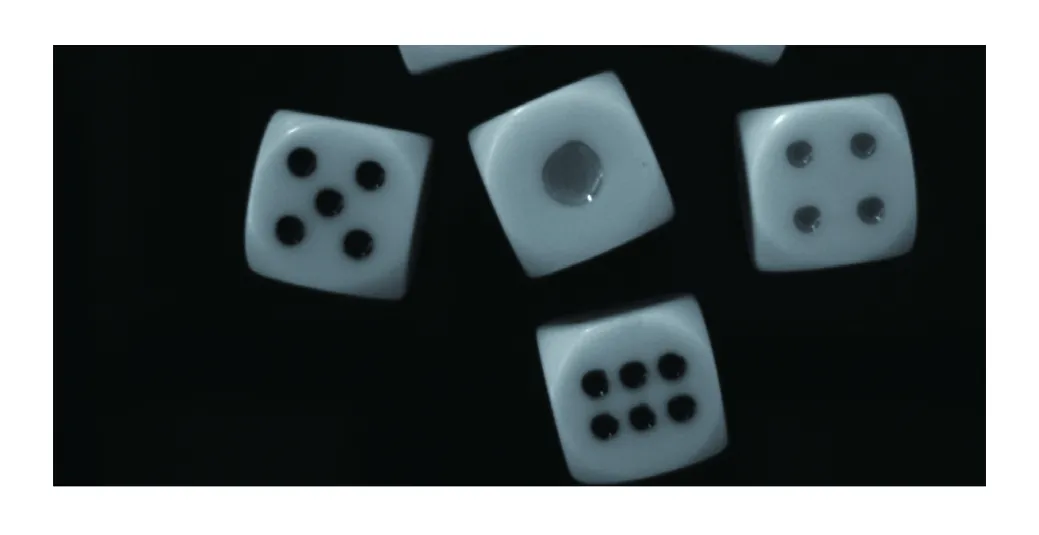
图6 骰子点数识别与快速检出
3 结语
通过开展利用科研设备及成果开发本科生实验项目的研究工作,探索与实践了科研成果与本科生实验教学内容转化融合的新模式,有效利用了科研成果。在投入少量资金的基础上,将科研设备融入到实验教学环节中,促使教师从教学角度出发对现有科研设备进行升级改造,进一步锻炼了教师的科研能力,真正实现了教学和科研的相互促进、相互融合。通过实施表明,留给学生自己发挥的空间大大增强了,给学生提供了一个接触和利用学科前沿实验平台的条件,对大学生创新能力培养起到了较好的作用。
猜你喜欢
黄河之声(2018年5期)2018-05-17
成都中医药大学学报(教育科学版)(2016年1期)2016-01-22
Coco薇(2015年10期)2015-10-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
浙江理工大学学报(自然科学版)(2015年12期)2015-03-01
中国法学教育研究(2014年3期)2014-10-16
重庆邮电大学学报(社会科学版)(2013年5期)2013-03-11
中国经济信息(2004年15期)2004-08-10
