新型自适应容积卡尔曼滤波算法及其在目标跟踪中的应用
2018-09-10 00:51黄硕李冠男荆涛曹洁
现代信息科技 2018年2期
关键词:目标跟踪
黄硕 李冠男 荆涛 曹洁

摘 要:针对标准容积卡尔曼滤波(CKF)在目标跟踪中出现的问题,根据系统噪声统计特性不准确或未知的特点,提出一种基于协方差匹配原则的自适应容积卡尔曼滤波算法。该算法通过利用新息序列与残差序列来实现对观测噪声协方差和过程噪声协方差矩阵的实时跟踪,进而进行在线调整噪声统计特性,能够有效的改善由于噪声特性未知所引起的滤波发散相关问题。将该算法应用在目标跟踪仿真实验中,结果表明,与标准CKF算法相比,在系统噪声统计特性未知的情况下,该算法具有更好的实时性,不仅抑制了滤波器的发散问题,而且提高了对目标的跟踪精度。
关键词:容积卡尔曼滤波算法;协方差匹配;自适应滤波;目标跟踪
中图分类号:TN713;TN953;V557 文献标识码:A 文章编号:2096-4706(2018)02-0062-05
New Adaptive Cubature Kalman Filter Algorithm and Its Application in Target Tracking
HUANG Shuo,LI Guannan,JING Tao,CAO Jie
(Department of Information Engineering,Army Armored Military Academy,Beijing 100072,China)
Abstract:In view of the problem of standard volume Calman filter (CKF) in target tracking,an adaptive volume Calman filtering algorithm based on covariance matching principle is proposed in the light of the inaccurate or unknown characteristics of the statistical characteristics of the system noise.The algorithm realizes the real-time tracking of the covariance of the observed noise and the covariance matrix of the process noise by using the new interest sequence and the residual sequence,and then adjusts the statistical characteristics of the noise on line,and can effectively improve the filtering and divergence problem caused by the unknown noise characteristics.The algorithm is applied to the target tracking simulation experiment. The results show that,compared with the standard CKF algorithm,the algorithm has better real-time performance in the case of unknown noise statistical characteristics of the system,which not only inhibits the divergence of the filter, but also improves the tracking precision of the target.
Keywords:cubature Kalman filter;covariance matching;adaptive filter;target tracking
0 引 言
為了消除跟踪过程中产生的噪声污染,进一步根据量测值来确定目标运动状态,滤波器也演变出多种变幻形式。常用的非线性滤波算法主要有扩展卡尔曼滤波(Extended Kalman Filter,EKF)[1]和无迹卡尔曼滤波(Unseented Kalman Filter,UKF)[2,3]。与EKF相比,UKF不需要计算雅克比矩阵,运算量较小,并提高了非线性滤波的精度。容积卡尔曼滤波(Cubature Kalman Filter,CKF)[4,5]算法是近年提出的一种获得广泛关注的非线性滤波算法。它是由Arasaratnam提出的新型高斯滤波方法,利用球面-径向积分准则,选取样本点。UKF与CKF有相似的特性,由于CKF将采样点都选取在超球面上,不存在权重为负的情况,因此具有相同的权重值。相比于其他几种卡尔曼滤波器,CKF有着较高的精度。
滤波算法的精准度主要依赖于对噪声统计特性的判断,而噪声统计特性的不确定性及特性突变等情况,均会对滤波效果产生较大的影响。而且现今大部分改进的滤波算法,将噪声特性定为理想状态下的高斯白噪声,缺乏了对突变情况下滤波器效果的判断。针对此类问题,许多研究对自适应滤波算法进行了改良,于浛等[6]和丁家琳等[7]的研究均采用基于Sage-Husa噪声估计器的自适应滤波器,在噪声特性未知的情况下,滤波精度得到了很大程度的提高,但巨大的运算量限制了其在实际工程中的应用。Salahshoor等[8]将扩展卡尔曼滤波利用新息与协方差序列进行自适应的改进,但从扩展卡尔曼滤波算法自身来看,还存在许多不足。
为了降低运算量,同时又能够有效地提高滤波器的精确度,本文通过引入新息序列与残差序列利用协方差匹配的原则,对观测噪声和量测噪声的实际特性进行在线修正。在仿真实验中,在系统噪声特性未知的情况下,滤波精度有了明显的提高,效果好于标准CKF。
1 标准CKF算法
CKF算法利用球面-径向积分准则,选取的样本点均匀分布在超球体上,因此每个样本点都具有相同的正权值,不断传播容积点实现滤波,每一次滤波都进行时间更新和量测更新两大步骤。设离散时间非线性系统如下:
(1)
(2)
其中,表示系统在时刻的状态向量,表示系统位于时刻的量测向量,用来表示目标此刻的位置、速度、加速度等特征参数,假设过程噪声与量测噪声是相互独立的高斯白噪声,即:(0,),:(0,)。
CKF算法需要计算容积点,而后利用2n个容积点进行加权求和来近似高斯积分,对于解决任意分布函数利用容积积分准则求解积分问题,可以表示为:
(3)
式中
,
表示容积点的权值,表示传播的容积点集。
现在假设k+1时刻的后验概率密度函数 已知,CKF算法步骤如下:
Step1 时间更新
(1)求解协方差矩阵平方根和容积点:
(4)
(5)
(2)通过非线性状态方程传播容积点:
(6)
(3)得到状态预测值和状态预测协方差阵:
(7)
(8)
Step2 量测更新
(1)求解预测方差平方根和容积点:
(9)
(10)
(2)通过非线性量测方程传播容积点:
(11)
(3)k时刻量测值的观测预测值、新息方差阵和互协方差阵:
(12)
(13)
(14)
(4)计算时刻增益矩阵、状态更新值和协方差阵更新值:
(15)
(16)
(17)
2 自适应容积卡尔曼滤波算法(ACKF)
2.1 自适应噪声协方差
根据CKF算法的要求,由于外界环境的复杂性,需要已知系统噪声方差阵和量测噪声方差阵。量测噪声特性很难准确确定,即使确定也无法根据环境进行自我调整。因此,本文提出一种根据协方差匹配原则,利用新息和残差序列将CKF算法进行自适应的改进算法。该算法可根据噪声统计特性不断调节,能够适应外界环境带来的干扰,将滤波的精准度与稳定性大幅度提高。具体自适应CKF算法步骤如下:
分别定义新息序列与残差序列如下:
(18)
(19)
Step1 实时自适应量测噪声
由量测更新过程可得:
(20)
由新息向量利用开窗估计法可得新息协方差矩阵为(N为开窗大小):
(21)
同理残差向量协方差矩阵为:
(22)
将(21)代入(20)中即可得到量测噪声的协方差矩陣的估计值:
(23)
Step2 实时自适应过程噪声
将新息序列与残差序列做差可得:
(24)
将上式与其转置矩阵相乘,并求期望值:
(25)
将(21)、(22)及(8)代入上式:
(26)
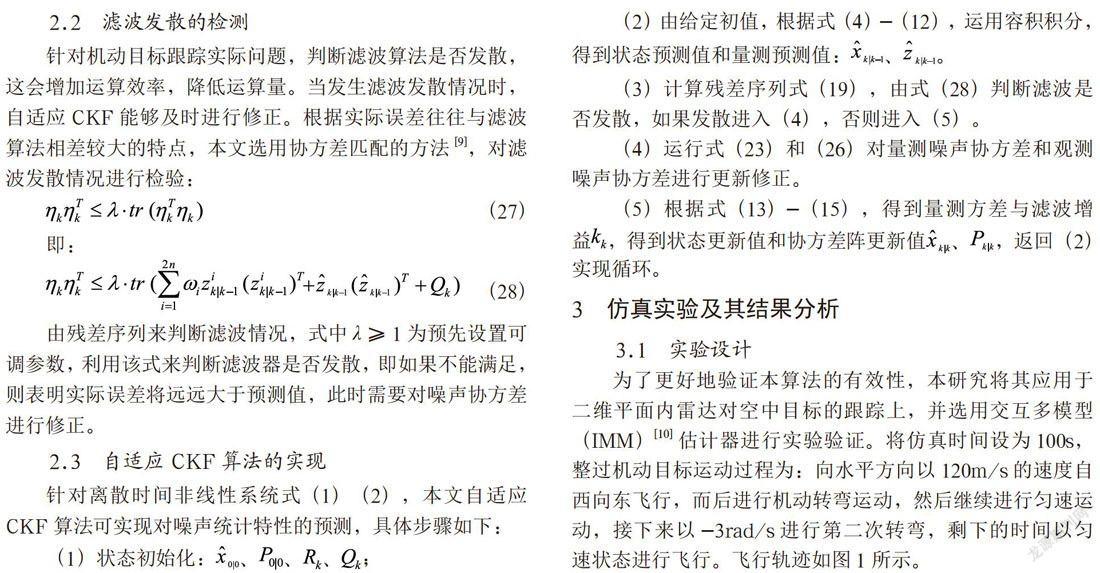
2.2 滤波发散的检测
针对机动目标跟踪实际问题,判断滤波算法是否发散,这会增加运算效率,降低运算量。当发生滤波发散情况时,自适应CKF能够及时进行修正。根据实际误差往往与滤波算法相差较大的特点,本文选用协方差匹配的方法[9],对滤波发散情况进行检验:
(27)
即:
(28)
由残差序列来判断滤波情况,式中λ≥1为预先设置可调参数,利用该式来判断滤波器是否发散,即如果不能满足,则表明实际误差将远远大于预测值,此时需要对噪声协方差进行修正。
2.3 自适应CKF算法的实现
针对离散时间非线性系统式(1)(2),本文自适应CKF算法可实现对噪声统计特性的预测,具体步骤如下:
(1)状态初始化:、、、;
(2)由给定初值,根据式(4)-(12),运用容积积分,得到状态预测值和量测预测值:、。
(3)计算残差序列式(19),由式(28)判断滤波是否发散,如果发散进入(4),否则进入(5)。
(4)运行式(23)和(26)对量测噪声协方差和观测噪声协方差进行更新修正。
(5)根据式(13)-(15),得到量测方差与滤波增益,得到状态更新值和协方差阵更新值、,返回(2)实现循环。
3 仿真实验及其结果分析
3.1 实验设计
为了更好地验证本算法的有效性,本研究将其应用于二维平面内雷达对空中目标的跟踪上,并选用交互多模型(IMM)[10]估计器进行实验验证。将仿真时间设为100s,整过机动目标运动过程为:向水平方向以120m/s的速度自西向东飞行,而后进行机动转弯运动,然后继续进行匀速运动,接下来以-3rad/s进行第二次转弯,剩下的时间以匀速状态进行飞行。飞行轨迹如图1所示。
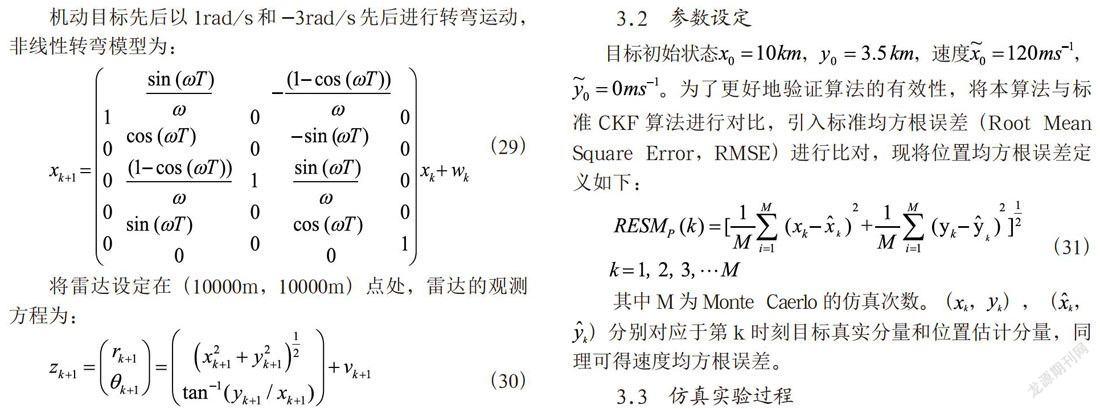
机动目标先后以1rad/s和-3rad/s先后进行转弯运动,非线性转弯模型为:
(29)
将雷达设定在(10000m,10000m)点处,雷达的观测方程为:
(30)
3.2 参数设定
目标初始状态,,速度,。为了更好地验证算法的有效性,将本算法与标准CKF算法进行对比,引入标准均方根误差(Root Mean Square Error,RMSE)进行比对,现将位置均方根误差定义如下:
(31)
其中M为Monte Caerlo的仿真次数。(,),(,)分别对应于第k时刻目标真实分量和位置估计分量,同理可得速度均方根误差。
3.3 仿真实验过程
实验一:将量测噪声特性设定为定常噪声,在仿真实验的过程中,将实际噪声协方差设定为初始值的两倍,将标准CKF算法与自适应CKF算法进行仿真比较。位置均方根误差、速度均方根误差分别如图2、图3所示。
实验二:将量测噪声特性设定为时变噪声,在仿真实验过程中,将开始至30s的噪声设定为初始值的二倍;当目标发生第一次机动后,即达到30s到65s时,将量测噪声协方差突变为初始值的四倍;达到65s到100s时,将量测噪声协方差突变至初始值的八倍。在实验过程中,噪声统计特使随着时间进行不断地改变。两种算法的均方根误差如图4、图5所示。
从图2和图3中可以看出量测噪声对滤波器的准确程度存在较大的影响,分析来看是由于噪声特性的不确定性,使标准CKF算法不能像本文所提出的自适应CKF算法,对量测噪声进行实时性的调整,速度和位置产生的误差远大于自适应算法。
进一步结合图4、图5进行分析,当机动目标发生高机动运动,并伴随着噪声特性的突变时,将会产生更大的误差,甚至会出现滤波器发散问题,导致目标丢失。但本文所用的自适应算法能将量测噪声所引起的突变情况进行分析,来改变系统本身量测噪声协方差,有效降低了系统整体误差,且有良好的稳定性,较标准CKF算法更具实用性,效果更好。
4 结 论
本文针对实际情况中可能出现噪声特性未知的问题,利用协方差匹配原则对量测噪声协方差以及系统噪声协方差进行在线调整,较标准CKF算法具有更强的适应性。自适应CKF算法能够有效降低由于噪声统计特性所引起的误差。空间目标跟踪实验结果表明,本文算法滤波精度更高,适应能力强,能够抑制由于噪声统计特性位置所引起的滤波发散问题,更具实用性。
参考文献:
[1] Einicke G A,White L B. Robust extended Kalman filtering [J].Signal Processing IEEE Transactions on,1999,47(9):2596-2599.
[2] Julier S,Uhlmann J,Durrant-whyte F H. A new method for the nonlinear transformation of means and covariances in filters and estimators [J].IEEE Trans.on Automat.contr,2000,45(3):477-482.
[3] Julier S J,Uhlmann J K. Unscented filtering and nonlinear estimation [J]. Proceedings of the IEEE,2004,92(3):401-422.
[4] Arasaratnam I,Haykin S. Cubature Kalman Filters [J]. IEEE Transactions on Automatic Control,2009,54(6):1254-1269.
[5] Nielsen R O. Accuracy of angle estimation with monopulse processing using two beams [J].Aerospace & Electronic Systems IEEE Transactions on,2001,37(4):1419-1423.
[6] 于浛,魏喜庆,宋申民,等.基于自适应容积卡尔曼滤波的非合作航天器相对运动估计 [J].航空学报,2014,35(8):2251-2260.
[7] 丁家琳,肖建.基于极大后验估计的自适应容积卡尔曼滤波器 [J].控制与决策,2014,29(2):327-334.
[8] Salahshoor K,Mosallaei M,Bayat M. Centralized and decentralized process and sensor fault monitoring using data fusion based on adaptive extended Kalman filter algorithm [J].Measurement,2008,41(10):1059-1076.
[9] 石勇,韓崇昭.自适应UKF算法在目标跟踪中的应用 [J].自动化学报,2011,37(6):755-759.
[10] 易令.高速高机动目标跟踪算法研究 [D].成都:电子科技大学,2006.
猜你喜欢
科技创新与应用(2016年36期)2017-02-21
电脑知识与技术(2016年27期)2016-12-15
航空兵器(2016年5期)2016-12-10
科技视界(2016年5期)2016-02-22
哈尔滨理工大学学报(2015年5期)2016-01-19
现代电子技术(2015年18期)2015-09-16
科技与创新(2015年12期)2015-07-21
数字技术与应用(2014年12期)2015-05-04
科技与创新(2015年5期)2015-04-20
农业科技与装备(2014年10期)2015-01-14