
基于单应性矩阵的线结构光传感器标定方法*
2018-09-11 02:12贾华宇崔海华程筱胜
传感器与微系统 2018年9期
贾华宇, 崔海华, 程筱胜, 李 想, 姜 涛
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引 言
结构光视觉测量具有非接触、效率高等特点,成为逆向工程中常用的测量方法之一[1~3]。其中,线结构光传感器由于其检测精度高、稳定性好等特点在工业检测领域得到广泛应用。线结构光视觉测量系统的标定包括相机参数标定及光平面参数标定两部分。其中,光平面参数的标定是线结构光视觉测量系统标定的关键所在。
线结构光标定方法主要有拉丝标定法、基于交比不变性的标定法、锯齿靶标法等[4~6],这三种标定方法都需要精密的标定辅助设备。针对这一问题有研究提出基于平面参照物的线结构光标定方法,但这种方法中标定板每移动一个位置都要计算这个位置下局部世界坐标系与世界坐标系的转换矩阵[7,8]。
为了简化线结构光传感器的标定过程,提高线结构光传感器标定的实时性,本文提出了一种基于单应性矩阵的线结构光标定方法。该方法无需特定标定物,完全依靠激光条纹在两个视图中的图像匹配点完成标定。
1 双目立体视觉线结构光测量模型
图1为基于双目立体视觉的线结构光测量模型。重建原理如下:假设激光条纹上任意一个三维空间点Pw=(X,Y,Z,1)T在左右相机中的图像匹配点分别为p1=(x1,y1,1)T,pr=(xr,yr,1)T,两个相机之间的旋转平移关系为R,t。则空间点Pw=(X,Y,Z,1)T在左右相机中成像为

(1)
可求得三维空间点的坐标为
X=CZ,Y=DZ,
(2)
式中A=(xr-crx)/frx;B=(yr-cry)/fry;C=(xl-clx)/flx;D=(yl-cly)/fly;flx,fly,frx,fy分别为左右相机焦距在不同方向的分量;(clx,cly),(crx,cry)分别为左右相机的主点坐标;ri为旋转矩阵中的第i个元素;tx,ty,tz分别为平移向量t在各个坐标轴上的分量。
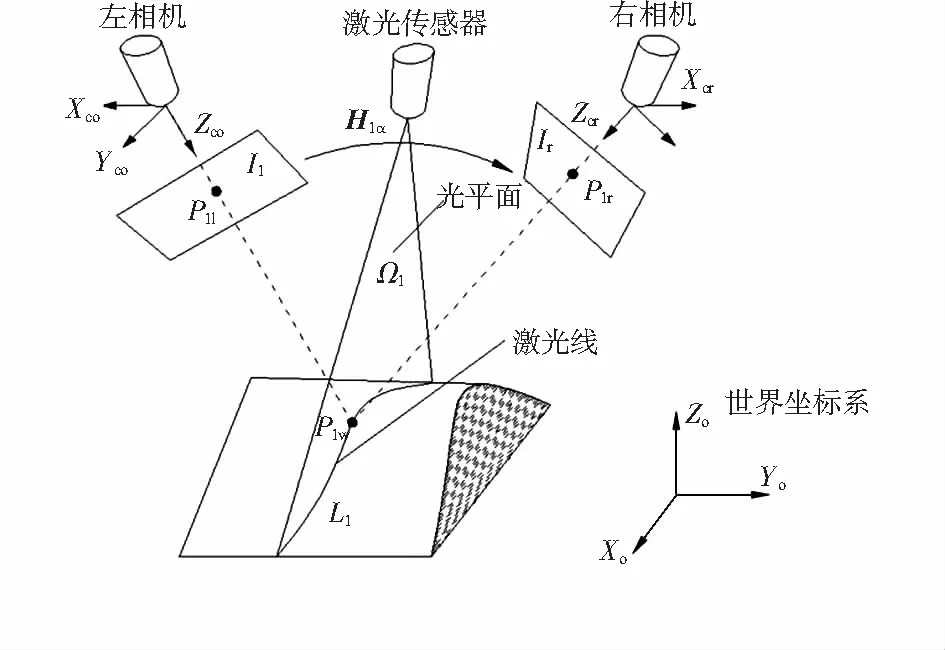
图1 线结构光测量模型
2 基于单应性矩阵的线结构光标定方法
2.1 新型标定方法的提出
在上述基于双目立体视觉的线结构光测量模型中,关键是如何表示投射至物体表面的激光条纹在左右视图中的匹配关系。由图1知,激光条纹L1是结构光光平面Ω1=(v1,1)T与被测物体表面的交线,假设P1w为激光条纹上任意点,左右相机射影矩阵分别为M=K(I|0),M′ =K′ (R|t),其中K,K′ 分别为左右相机的内参矩阵,I为单位矩阵,R,t分别为右相机相对于左相机的旋转与平移矩阵,P1w在左右相机中的图像分别是p1l,p1r,有
p1l=Mp1w=K[I|0]p1w,p1r=M′p1w=K′[R|t]P1w
(3)

可以由式(4)的变换表示激光条纹匹配关系
(4)
由此可以通过标定激光平面所对应的单应性矩阵来确定激光条纹在左右视图中的匹配关系。
2.2 线结构光光平面单应性矩阵标定流程
首先对双目相机进行标定,激光平面对应单应性矩阵标定主要包括激光条纹提取、激光条纹匹配、单应性矩阵求取三大步骤。具体步骤如图2所示。
1)激光条纹提取:左右相机同时采集激光器投射到任意物体不同位置的图像,提取第i张左右视图激光线中心点并分别存放在集合LazerPtli,LazerPtri。
2)激光线上特征点的匹配:在集合LazerPtli中随机选取若干个特征点,利用对极线约束在LazerPtri中寻找其对应的匹配点。
3)光平面单应性矩阵的标定:通过式(4)利用最小二乘法求解光平面所对应的单应性矩阵。
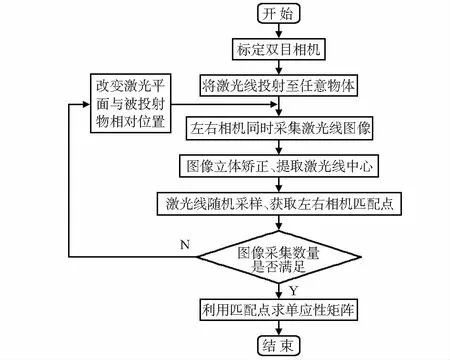
图2 光平面参数标定流程
3 线结构光传感器标定实验与结果分析
3.1 实验硬件
实验系统如图3所示,采用一个便携式手持激光扫描设备,由2个分辨率为1 280×960的电荷耦合器件(charge coupled device,CCD)相机及一个波长为660 nm的单线激光器组成。在左右相机的镜头前方均安装滤光片并安装了环形发光二极管(light-emitting diode,LED)光源。
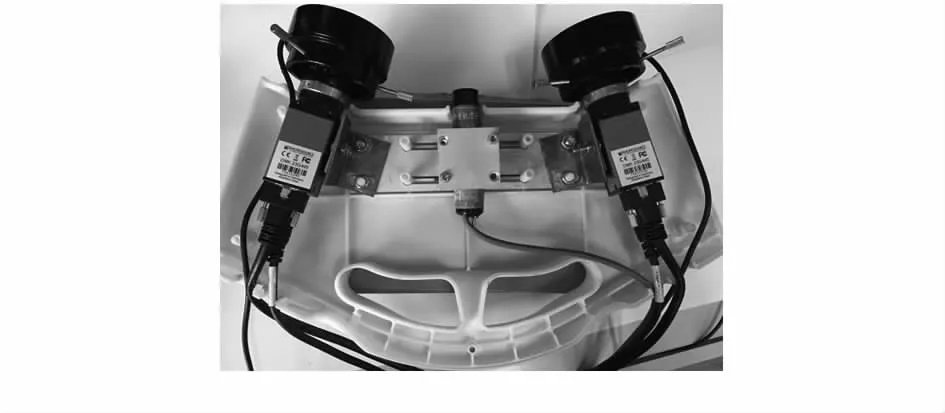
图3 硬件设备
3.2 线结构光传感器光平面标定
首先采用张正友标定法[9,10]对双目相机进行标定,然后标定线结构光传感器光平面对应的单应性矩阵。
将线结构光投射至平面物体的5个不同位置,左右相机同时采集若干张图片,本文方法标定光平面所对应的单应性矩阵,利用单应性变换求取激光条纹匹配点,接着利用双目视差原理重建求解激光条纹的空间坐标并拟合光平面,如图4(a)所示,其平面系数为w=(0.975-0.222,0.022,1.000);将线结构光投射至非平面物体的5个不同位置,标定单应性矩阵并重建出的激光线三维点云拟合空间平面如图4(b),其平面系数为w′ =(0.969,-0.218,0.026,1.000)。易得,2次拟合的光平面大致相同。2种情况下,各重复进行10次标定实验,求得的单应性矩阵中各元素(前8个元素,第9个元素恒为1)的方差如表1所示。图4和表1验证了利用单应性矩阵标定激光条纹在左右视图中的匹配关系的可行性及标定算法的稳定性。
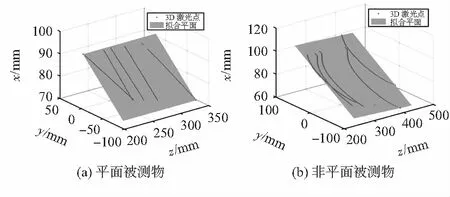
图4 激光条纹重建及光平面拟合
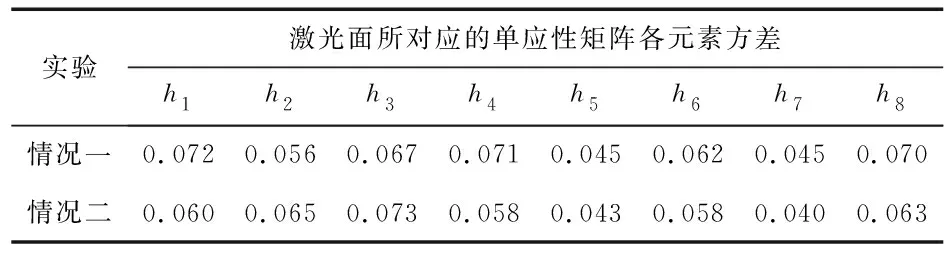
实验激光面所对应的单应性矩阵各元素方差h1h2h3h4h5h6h7h8情况一0.0720.0560.0670.0710.0450.0620.0450.070情况二0.0600.0650.0730.0580.0430.0580.0400.063
3.3 标定精度分析
为了验证标定的光平面对激光条纹重建精度的影响,选取台阶状零件标准块(台阶高度为(5±0.01)mm)为被测对象,左右相机同时采集若干张序列图像,利用标定好的单应性矩阵,通过式(4)求得激光条纹在左右视图中的匹配点,然后利用双目视差原理重建激光线,并将每个视角下重建的激光条纹转换至同一个世界坐标系,然后对重建的台阶面拟合平面。被测物及重建结果如图5所示。从各个平面上随机选取10个点,计算该点与其余两个平面的距离如表2所示。由表2可以估算测量误差在+0.235~-0.242 mm之间,满足一定的测量精度要求。
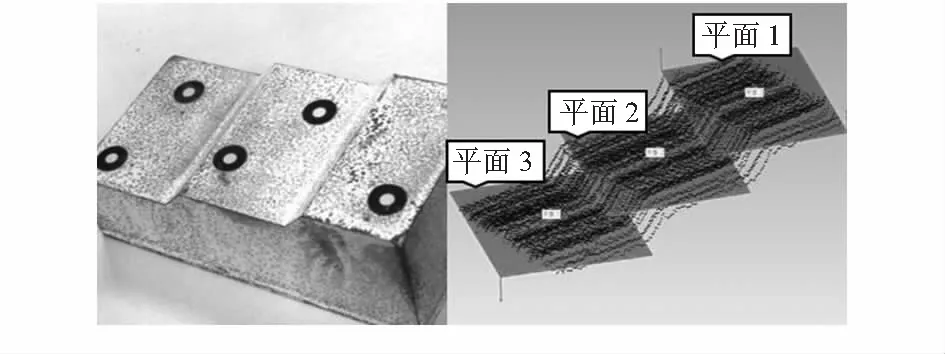
图5 台阶状标准件及测量点云
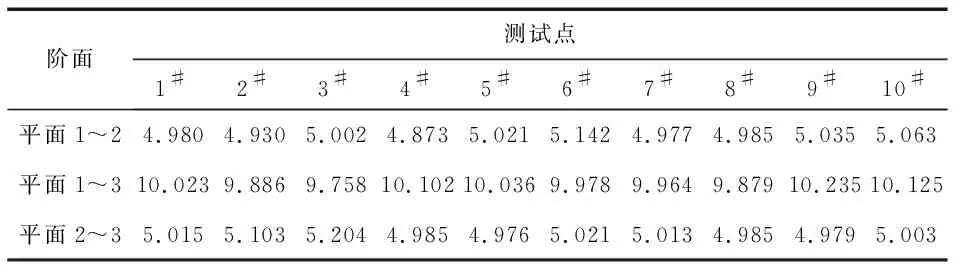
阶面测试点1#2#3#4#5#6#7#8#9#10#平面1~24.9804.9305.0024.8735.0215.1424.9774.9855.0355.063平面1~310.0239.8869.75810.10210.0369.9789.9649.87910.23510.125平面2~35.0155.1035.2044.9854.9765.0215.0134.9854.9795.003
3.4 激光平面实时标定与激光线实时重建测试
为了检验该方法实时标定及重建的现场适应性,选取小猪石膏模型为待测物,并在其周围粘贴圆形拼接标志点。在双目相机已经标定完成的前提下,将激光器投射至小猪石膏模型表面(图6(a)),实时标定线结构光光平面对应的单应性矩阵,然后利用标定好的单应性矩阵完成激光条纹的匹配,利用双目视差原理实时重建激光条纹三维信息,利用圆形标志点将每次重建的激光线转换至同一个世界坐标系,最终测量点云如图6(b)所示。实验表明,在测量形貌复杂的物体时,该方法可以实时标定线结构光传感器光平面的单应性矩阵,并可以利用标定结果实时重建激光线,重建效果良好。
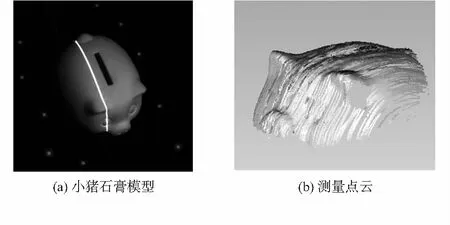
图6 光平面实时标定及重建
4 结 论
本文提出了一种基于单应性矩阵的线结构光传感器标定方法。实验结果表明:该标定方法无需依赖特定标靶辅助,可从单帧立体图像获取线结构光传感器光平面所对应的单应性矩阵,适合于现场实时标定,标定结果的稳定性较高。为以后进行多线结构光传感器的标定及多线激光条纹的匹配提供新的思路和理论基础。
猜你喜欢
电子制作(2019年20期)2019-12-04
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
测控技术(2018年4期)2018-11-25
中学生数理化·中考版(2017年6期)2017-11-09
非公有制企业党建(2017年10期)2017-11-03
现代兵器(2017年4期)2017-06-02
现代兵器(2017年4期)2017-06-02
现代计算机(2016年11期)2016-02-28
