无人机立体影像在通信中的建模应用
2018-09-12 07:56王星王欣玥
电信工程技术与标准化 2018年9期
王星,王欣玥
(中国移动通信集团设计院有限公司,北京 100080)
1 研究背景
5G大连接、高密度、高速率的特性对现有数百万移动通信基站的布局、设备配置、天线布放都提出了调整和变动要求,需要一种高效、精确、可复现的方法,对基站的塔、房、天线等基础设施和环境信息进行采集,达到可测、可观、易存储、可复现的效果。
通信勘察的核心任务是采集通信工程项目建设需要的数据,如基站经纬度、海拔高度、基站塔房和设备的安装情况等,传统勘察方式是勘察人员在现场画草图、填表和拍照片的方式记录,最终绘制成平面图纸。传统方式的问题在于对于信息处理过程进行了抽象,不能完全反映现场实景,难以数字化复现;记录的疏漏和误差不可避免,精度有限,成果难以复测和复核;人员必须到安装现场测绘,受交通、环境安全、设施管理的因素影响大,勘察效率低。参考文献[1]中给出了通信基础设施立体影像采集系统的特征和系统流程图。参考文献[2]和[3]对无人机数据处理进行了分析。参考文献[4]和[5]分别给出了通用性的无人机移动测量系统工作流程。因此,用无人机作为通信基础设施立体影像的采集承载手段是技术可行的。本文开展了多种无人机型对落地铁塔和楼顶天面两类典型基站场景的三维数字化采集和建模试验,对误差进行了统计分析,论证了系统精度满足通信工程要求。
2 通信用无人机立体影像采集系统
通信用无人机立体影像采集有其特殊的复杂性。因为通信基站除少数高山、高铁、村通基站外,大多设置在人口密集的地区,传播环境复杂,基站的密度可达到每平方千米5~8个。这导致通信用无人机起降条件受限、体积和载荷受限、需要在不同平面悬停、测量精度要求较高等。参考文献[1]指出,通信用无人机立体影像采集系统,在精度可控的环境下,从性价比角度优选可见光成像。本文实证了三款搭载2 000万像素可见光相机的系统,按照图1给出的通信基础设施立体影像采集系统流程图,开展了数据采集、三维数字化点云生成、三维数字化建模试验,并对比分析了各系统的建模精度。
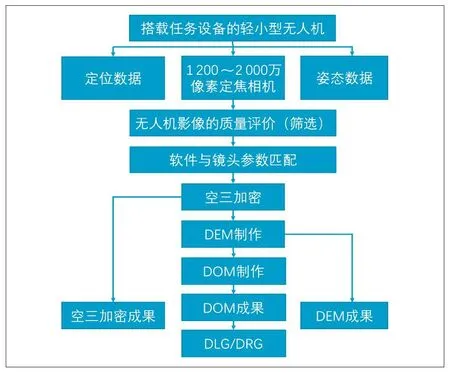
图1 通信基础设施立体影像采集流程图
3 机型比较和选择
根据民航局标准,起飞空机重量不大于4 kg且起飞全重不大于7 kg的二类无人机受限制较少。多悬翼无人机相比固定翼无人机,对起降场地要求低,能够在按需在在不同平面悬停作业。因此二类多悬翼无人机适合在通信工程场景使用。
对二类多悬翼无人机,本文中选取大疆消费级、作业级、专业级三款搭载可见光设备的飞机进行了对比,如表1所示。
在白天3级风条件、飞控参与条件下,采用大疆三款二类机型绕目标塔进行了半径15 m的绕圈飞行。飞行轨迹记录、相机照相点、软件特征点匹配情况见图2所示。
从飞行轨迹记录看,较重的飞机在风中轨迹更圆,效果更佳。从相机照相点的均匀性看,RTK的参与对飞控能力的提升有帮助,效果更佳。从软件特征点匹配角度看,较重的、有RTK的飞机软件解析效果好,较轻的、无RTK的飞机解析有缺失的风险。

表1 大疆三款无人机参数对比表

图2 飞行记录图 大疆经纬M210/大疆悟INSPIRE 2/大疆精灵PHANTOM 4PRO
4 误差与实证
参考文献 [1]给出可见光系统的测量精度取决于地面分辨率(GSD),通过控制图像质量、图像重叠度、增加控制点等手段,用PIX4D、SMART3D等软件处理能达到1~3个GSD的精度。本文就采用大疆三款机型搭载2 000万可见光定焦成像设备,利用PIX4D后处理软件,进行了实证研究。
4.1 误差分析
大疆三款机型本次试验的GSD和误差分析如表2所示。

表2 大疆三款无人机GSD和误差分析对比表
软件处理后理想的系统误差在3~9 cm (1~3GSD),满足通信工程需要。
4.2 对无人机拍摄、图像处理的要求
通信基础设施立体影像采集系统对无人机拍摄、相机、图像处理也有一定要求。参考文献[1]、[2]对满足建模要求的飞行方案和飞行方式进行了研究,指出关键因素如下。
(1) 图像质量:一是需要高质量的航拍相机,二是无人机平台本身的控制稳定性要好,去掉噪点较多、曝光过低或过高、运动模糊、GPS/POS数据丢失的照片。
(2) 航拍方式:近距离、蛇形平飞,航向重叠度60%-80%。
(3) 硬件及相机标准:相机最好和数据处理软件进行过匹配校正,避免焦距和传感器尺寸标称值谬误。
(4) 在勘察场地布置3~8个控制点,或在软件中在两张以上图像中精确标注同一个像素作为控制点。
4.3 实证研究
本文据此开展了大疆三款机型对水平标靶、垂直标靶两类典型场景的三维数字化采集和建模实验,并且就生成的三维点云分别邀请A、B二人进行测量,记录测量误差值,并对长度误差率测量值开展统计分析。
表3为可见光建模垂直/水平测量结果。表4为可见光建模数字点云测量误差分析。
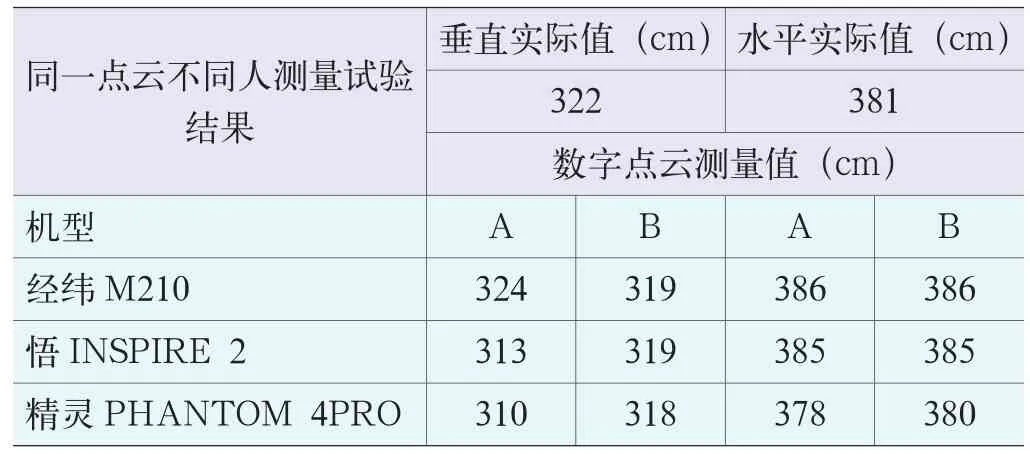
表3 可见光建模垂直/水平测量结果
测试结果对比分析表明,三种机型三维数字化采集和建模后,数字点云测量垂直误差在3~8 cm以内,垂直误差均值在2.5%以内;水平误差在2~5 cm以内,水平误差均值1.5%以内,满足通信设计需求。
对上述长度误差率测量值样本开展统计分析,考察数据分析的代表性。考虑到是对同样点云开展的不同人员的处理对比、小样本数量等特征,选择T检验统计方法。
设数组[A]为A的6次长度误差率测量值,数组[B]为B的6次长度误差率测量值。
[A]={0.62%、2.80%、3.73%、1.31%、1.05%、0.79%}
[B]={0.93%、0.93%、1.24%、1.31%、1.05%、0.26%}
首先开展误差率的成对双样本T检验,检验95%的置信区间下,两个样本是否具有相同总体均值,即原假设H0:μA=μB,a=0.05。
检验结果T值小于t单尾临界值、单尾P值大于a/2,接受原假设。即95%的置信区间下,长度误差率测量值样本具有相同总体均值。表5为T检验双样本分析。
由于已经验证误差率样本具有相同总体均值,所以将全部长度误差率测量值合并处理。设数组[C]为全部12次测量值。

表4 可见光建模数字点云测量误差分析

表5 T检验双样本分析
[C]={0.62%、2.80%、3.73%、1.31%、1.05%、0.79%、0.93%、0.93%、1.24%、1.31%、1.05%、0.26%}
下面对[C]开展T检验,检验95%的置信区间下,长度误差率测量值具有1.5%的总体均值,即原假设H0:μC=1.5%,a=0.05。
检验结果T值小于t单尾临界值、双尾P值大于a,接受原假设。即95%的置信区间下,长度误差率测量值具有1.5%的总体均值,见表6所示。

表6 T检验分析
综上可见,三维数字化采集和建模后,数字点云长度误差率测量值具有1.5%的总体均值。结合参考文献[1]对可见光三维建模天线下倾角角度测量偏差均值在0.77度以内的结论,可以得出采用轻小无人机搭载可见光成像设备, 利用PIX4D后处理软件,能满足对基站的塔、房、天线等基础设施和环境信息进行采集和数字化,达到可测、可观、可存储、可复现的效果。
5 总结与展望
本文通过对通信基站立体影像采集系统的研究,形成了立体影像的三维数字化点云,实地开展了不同机型的落地塔和楼顶天面两类典型基站场景的三维数字化采集和建模试验,并比对分析了垂直和水平误差,提出了一套无人机通信基础设施立体影像采集系统,提升了勘察和规划设计的效率,累积了宝贵的通信行业数字资产。考虑到部分城市无人机的航拍非常困难,下一步需要研究用一些其他搭载方式,如手持、背包、车载方式对通信基础设进行立体影像采集。
猜你喜欢
北京测绘(2023年1期)2023-02-23
汽车观察(2022年12期)2023-01-17
计算机应用文摘·触控(2021年20期)2021-11-11
小哥白尼(趣味科学)(2020年3期)2020-07-27
健康大视野(2020年1期)2020-03-02
科技创新与应用(2019年26期)2019-10-24
军营文化天地(2018年2期)2018-04-20
焦点(2018年10期)2018-01-28
电脑知识与技术(2017年2期)2017-04-25
创新作文(小学版)(2016年10期)2016-11-11