一种用于采样返回的两舱段联合供电技术研究
2018-09-15 08:36夏宁刘治钢杜青马玉伟蔡晓东崔波张明王超
航天器工程 2018年4期
夏宁 刘治钢 杜青 马玉伟 蔡晓东 崔波 张明 王超
(北京空间飞行器总体设计部,北京 100094)
多舱段组合航天器是空间飞行器的一种,在返回式卫星、飞船、探月工程中已得到广泛应用。如ESA的“火星快车”,由轨道器和着陆器(猎兔犬-2)组成,我国返回式卫星和“神舟”系列飞船一般由轨道舱、推进舱和返回舱组成,嫦娥三号探测器由着陆器与巡视器组成。随着空间探测目标任务日益丰富,尤其以空间站为代表的载人航天探测任务和以月球着陆、巡视勘探、采样返回任务为代表的深空探测任务,往往采用多舱段组合方式完成预定探测任务。常规航天器经由运载火箭发射入轨后,在任务期间一般不会发生组合形态的变化,其电源系统也通常为独立电源系统。多舱段组合航天器在任务期间不同阶段完成不同任务,会出现舱段分离、交会对接等组合形态变化,且各舱段之间也根据任务安排有不同供电需求。因此,根据不同的任务特点对多舱段组合航天器电源系统进行针对性设计[1]。
目前,多舱段组合航天器供电方式大致可以分为3类:①舱段间不存在供电关系,各舱段独立供电满足各自负载需求;②舱段间单向供电,在舱段组合飞行期间,一个舱段完全由另外的舱段供电;③舱段间双向供电,双向供电又包括两种情况,第一种是并网供电,第二种是联合供电,两者区别是并网供电各舱段均有独立的电源系统,联合供电各舱段电源系统存在复用[2]。单向供电方案一般用于两个舱段规模不相称的航天器,其中一个舱段配置有完整的太阳电池阵-蓄电池组电源系统,另一个舱段为完成特定任务通常只携带储能元件,例如火星快车与猎兔犬2号,从发射段至到达火星轨道整个过程均由火星快车向猎兔犬2号供电,直至达到目标轨道将猎兔犬2号释放前,才转为猎兔犬2号自身携带的蓄电池组供电。单向供电方案较多用于目标天体进入着陆探测任务;双向并网供电主要适用于起始状态相互独立的飞行器经交会对接后相互间需要建立供电受电关系,例如“国际空间站”中美国电源系统与俄罗斯电源系统之间通过并网控制器实现双向供电[3]。双向联合供电主要适用于起始状态为组合体,在飞行过程中产生分离,由其中某一舱段继续完成后续任务,复用的目的主要是减重,使系统性能得到优化。目前检索到的国内外资料已发射的航天器未发现采用复用设备/模块实现联合供电的多舱段组合式航天器设计方案。
本文针对目标天体进入采样返回探测任务供电需求复杂、质量约束严酷的特点,提出了一种两舱段复用蓄电池组和放电调节(BDR)模块的联合供电技术,舱段1电源系统由太阳电池阵、充电分流调节模块、BDR模块、蓄电池组等组成;舱段2电源系统由太阳电池阵、充电分流模块等组成,两舱段的全调节母线通过器间电缆连接。建立了两舱段联合供电工程仿真模型对典型联合供电工况进行仿真分析,并搭建了试验平台开展试验验证,试验数据与仿真结果具有较好的一致性,验证了设计方案的可行性,可为后续多舱段组合航天器联合供电系统方案设计提供参考。
1 两舱段组合航天器双向供电技术研究
1.1 采样返回探测任务供电特点分析
采样返回探测的飞行阶段通常包括接近段、环绕段、着陆段、目标天体表面采样段、上升段和返回段。受发射质量和成本等因素制约,着陆-采样-上升阶段飞行任务通常由两个舱段完成,舱段1和舱段2组成着陆上升组合体降落在目标天体表面,完成采样和样品收集,之后两器分离,由上升器携带样品离开,着陆器结束使命或者留在目标天体表面继续开展探测或科学试验。在组合体状态下,两器具备双向供电的能力有利于整器能源的优化配置和供电可靠性、安全性的提高;在单器模式下,上升器承载样品飞离目标天体表面,存在单舱段工作的飞行阶段,因而需要配置一套独立的电源系统,着陆器留在目标天体表面,如需继续开展探测任务,则也需要配置一套独立的电源系统;如两器分离后没有后续任务,则应考虑最大程度与上升器复用设备和模块,以减少整器质量降低发射成本和设计难度,使整器性能达到最优。
下文以“两器分离后着陆器使命结束”的任务需求为例,开展两舱段航天器供电方案设计。
1.2 两舱段组合航天器双向供电方案设计
图1~图3给出了3种可用于两舱段组合航天器双向供电的设计方案:方案1,两舱段设备不复用,通过并网控制器实现双向供电;方案2,两舱段设备不复用,通过器间电缆实现双向供电;方案3,两舱段复用蓄电池组和放电调节器,通过器间电缆实现双向供电。表1为两舱段双向供电3种方案的优缺点对比。
由表1对比分析可知,方案1通用性最强,但质量大、传输效率低;方案2质量适中,传输效率高,适合两舱段分离后着陆器仍需继续工作的任务需求;方案3质量最轻,对于“两器分离后着陆器使命结束”的任务需求而言是3个方案中的优选方案,既满足任务需求,又尽可能实现轻小型、集成化设计[4-5]。
针对方案3在不同工况下的两舱段工作模式进行分析,共存在以下4种工况:①只有舱段1太阳电池阵受到光照,舱段1太阳电池阵为舱段1负载供电,并为舱段1蓄电池组充电,同时通过舱段间电缆为舱段2负载供电;②只有舱段2太阳电池阵受到光照,舱段2太阳电池阵为舱段2负载供电,并通过舱段间电缆网为舱段1负载供电和蓄电池组充电;③两舱段太阳电池阵均受到光照,各舱段太阳电池阵分别满足各自负载供电需求,如有剩余功率则根据母线电压高低情况通过舱段间电缆网进行互相补充供电;④地影期间,舱段1的蓄电池组通过BDR模块放电,为两舱段负载供电。舱段间分离后,舱段2无蓄电池组,只能在光照期工作。舱段1仍保持太阳电池阵-蓄电池组联合供电状态,实现舱段1用电负载供电和蓄电池组充放电功能。
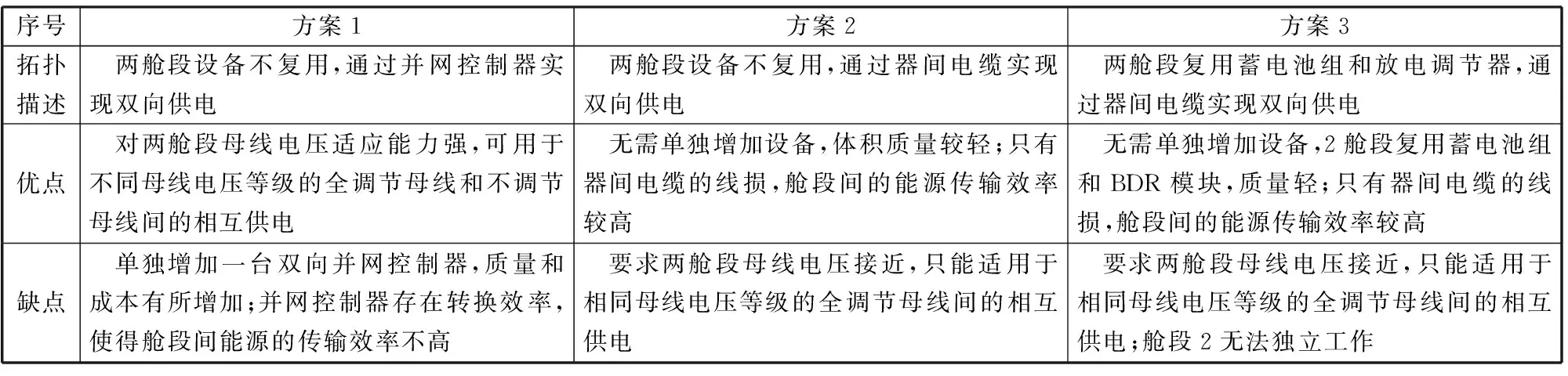
表1 两舱段双向供电方案对比
针对上述4种工况进行分析可知,工况1和工况4中,舱段2实际可看作舱段1的负载,该两种工况与舱段1单器模式下类似,只是负载功率需求较大(增加了舱段2的负载)。工况2和工况3中,舱段2的太阳电池阵、电源控制模块(PCU)与舱段1的放电调节模块(BDR)通过舱段间电缆网实现穿舱联合供电,该两种工况很容易出现多母线间的竞争和串扰问题,此处需采取两舱段母线电压差异化的设计方式。为考核相应控制和反馈回路的设计合理性和稳定性,需要通过建模仿真和试验进行验证。
下文将选取工况2和工况3作为两舱段联合供电的典型工况,开展仿真和试验验证。考核联合供电系统的设计合理性和稳定性,本质上就是考核电源控制模块和放电调节模块的匹配性,相应最直接的评判指标也就是各舱段母线电压的动态特性(即负载跃变时,母线电压的波动幅值和恢复时间)。
2 两舱段组合航天器联合供电技术建模仿真
在Matlab软件环境下开展建模和仿真分析,具体如下。
2.1 仿真模型
本模型中采用串联顺序开关分流调节(S4R)和顺序开关分流调节(S3R)混合的电源控制方式,太阳电池阵按照式(1)进行建模,蓄电池组采用软件库中既有模型[6-7]。
(1)
式中:I为电池单元输出电流,Ipn为光生电流(p-n结电流),Io为反向饱和电流,V为外加电压,q是电子电荷,K是玻耳兹曼常数,T是绝对温度,n是二极管因子,Rs是电池表面和背面电极的接触电阻,Rsh是电池边沿漏电通路等效电阻(见图4)。
此处,着陆器和上升器太阳电池阵控制部分均包含S4R和S3R两种电路结构,着陆器和上升器复用放电调节模块和蓄电池组,两舱段的全调节母线通过器间接口直接相连,两舱段的不调节母线通过装于上升器中的蓄电池组相连。
着陆上升组合体电源系统电路结构如图5所示。
2.2 仿真条件与参数
以某采样返回深空探测器为例,其母线电压和负载需求情况见表2。

表2 仿真条件与参数
2.3 仿真结果
针对组合体联合供电的2种不同工况分别进行仿真,每种工况下通过设置太阳电池阵输出使系统处于分流、联合供电和蓄电池组放电3种不同的状态,从而考察母线电压的稳态和动态特性,部分仿真结果如下。
(1)着陆器太阳电池阵和上升器蓄电池组联合供电模式下,在分流状态时,设置着陆器负载为20 A,设置上升器负载从8 A减载为1 A,两舱段母线电压的波形如图6、图7所示。
由图6、图7可知,上升器母线波动为1.20 V,恢复时间为5.13 ms,着陆器母线电压波动大小为0.95 V,恢复时间为5.01 ms。上升器端负载情况发生变化,由于着陆器与上升器间连接线缆阻抗的作用,着陆器端母线电压的波动小于上升器端。两舱段母线电压稳定后,均为29 V左右。
(2)着陆器太阳电池阵和上升器太阳电池阵以及蓄电池组联合供电模式下,在联合供电状态时,设置上升器负载为8 A,设置着陆器负载从2 A加载为20 A,两舱段母线电压的波形如图8、图9所示。
由图8、图9可知,上升器母线波动为0.88 V,恢复时间为4.86 ms,着陆器母线电压波动大小为1.06 V,恢复时间为5.04 ms。两舱段母线电压稳定后,均为29 V左右。
由仿真可见,加减负载时,母线电压随之发生跃变,经过短暂时间后恢复正常值。母线电压发生跃变时,波动不大于±1.5 V,恢复时间小于10 ms;稳定后,母线电压值满足(29±1) V。即着陆、上升器两舱段复用蓄电池组和放电调节模块的联合供电设计方式,能够实现两舱段母线电压的差异化有序供电,动态特性满足要求,相应控制和反馈回路稳定有效,在确保轻小型集成化设计的前提下解决了多母线间的竞争和串扰难题。
3 组合体联合供电试验验证
3.1 试验平台的搭建
图10为着陆上升组合体联合供电方案试验平台框图,图11为试验平台实物照片。上升器锂离子蓄电池组、上升器功率调节与配电单元(PCDU)和着陆器功率调节与配电单元(PCDU)采用方案阶段工程样机;通过方阵模拟器模拟着陆器和上升器太阳电池阵工作情况,通过多路电子负载模拟星上负载供电情况;联合供电控制监视台是完成数据采集、指令输出和状态显示,通过1553B总线与着陆器PCDU、上升器PCDU通信。
3.2 试验步骤及结果
试验中,设置其中一舱段为空载或额定负载,在分流、联合供电以及蓄电池组放电3种不同状态下,变换另一舱段的负载情况,对全调节母线电压的特性进行测试,部分试验结果如下。
1)着陆器太阳电池阵+上升器蓄电池组
着陆器太阳电池阵和上升器蓄电池组联合供电模式下,在分流供电状态时,设置上升器负载为1 A,设置着陆器负载从20 A减载至2 A,两舱段母线电压的特性曲线如图12所示。
图12中,上升器母线电压波动为0.73 V,恢复时间为4.7 ms,着陆器母线电压波动大小为0.89 V,恢复时间为5.4 ms。着陆器端负载情况发生变化,而由于上升器与着陆器间连接线缆阻抗的作用,上升器端母线电压的波动小于着陆器端。两舱段母线电压稳定后,均为29 V左右。
2)着陆器太阳电池阵+上升器太阳电池阵+蓄电池组
着陆器太阳电池阵、上升器太阳电池阵和蓄电池组联合供电模式下,在分流状态时,设置着陆器负载为2 A,设置上升器负载从1 A加载至8 A,两舱段母线电压的特性曲线如图13所示。
图13中,上升器母线电压波动为0.66 V,恢复时间为4.8 ms,着陆器母线电压波动大小为0.42 V,恢复时间为4.1 ms。两舱段母线电压稳定后,均为29 V左右。
试验与仿真结果具有较好的一致性,着陆器与上升器组合体联合供电母线电压特性良好,验证了两舱段航天器复用蓄电池组和BDR模块联合供电方案的可行性。
4 结束语
本文针对采样返回深空探测任务提出了一种两舱段复用蓄电池组和放电调节器模块的联合供电技术,该方案具有系统质量轻、能源传输效率高等优势。通过在Matlab软件环境下建立的组合体供配电链路模型,针对2种典型联合供电工况进行了仿真分析和试验验证,仿真与试验结果具有较好的一致性。本文提出的设计方案和验证方法,对提升多舱段组合航天器电源系统设计能力,开展后续多舱段组合航天器联合供电系统设计具有重要的借鉴意义。
猜你喜欢
装备环境工程(2022年4期)2022-05-06
太空探索(2022年3期)2022-03-28
国际太空(2021年8期)2021-11-05
太阳能(2021年10期)2021-11-03
北京航空航天大学学报(2021年7期)2021-08-13
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
上海航天(2020年3期)2020-07-01
课程教育研究·学法教法研究(2018年20期)2018-08-11
装备环境工程(2018年7期)2018-08-01