基于五杆机构的丹参膜上移栽机构设计与试验
2018-09-17 06:49徐高伟刘宏新荐世春何腾飞
农业机械学报 2018年9期
徐高伟 刘宏新 荐世春 史 嵩 何腾飞
(1.东北农业大学工程学院, 哈尔滨 150030; 2.山东省农业机械科学研究院, 济南 250100)
0 引言
丹参是我国常用大宗药材之一,年需求量5.2万t且用量逐年增加[1-2]。在丹参种植过程中,移栽是其重要环节,丹参种植的劳动力成本占丹参种植总成本50%以上[3]。山东省丹参种植方式以山东省农业主推技术“丹参大垄双行覆膜高效生产技术”为基础,采用大垄膜上移栽的栽培模式,要求丹参种苗与垄面线的夹角不低于80°,以增加丹参扎根深度,提高丹参产量[4]。然而,由于丹参移栽机械化配套工作起步较晚,针对上述种植模式的丹参移栽几乎全部由人工完成,不仅劳动强度大,生产效率和质量低,而且立苗率难以保证[5-7]。
目前,市面上膜上移栽机构主要以移栽蔬菜[8]、烟草[9]等作物的钵苗移栽为主,而丹参育苗方式采用传统的作畦越冬育苗,移栽方式为裸苗移栽,没有钵体支撑,移栽后在穴中姿态不确定,极易倒伏;另外,丹参种苗长度约为200 mm,根茎长度约为150 mm,质量较轻,根茎细长。由于丹参种苗的植株形态与蔬菜、烟草钵苗相差较大,蔬菜、烟草等膜上移栽机构的鸭嘴栽植器与丹参种苗的匹配程度较低,降低了丹参移栽质量[10];丹参种苗移栽深度为150 mm,远超过蔬菜、烟草等作物,现有膜上移栽机的轨迹升程无法满足丹参移栽。而以丹参裸苗以及丹参栽培模式为移栽对象和农艺要求的丹参专用移栽机和移栽机构尚未见相关报道。
针对以上情况,本文结合“丹参大垄双行覆膜高效生产技术”提出的农艺要求,同时针对丹参种苗裸苗机械化移栽的立苗率问题设计一种五杆式丹参移栽机构,实现丹参移栽的农艺要求,提高鸭嘴栽植器与丹参种苗的匹配程度,保证丹参裸苗移栽的大升程轨迹、作业质量和立苗率要求,同时为五杆机构在特定约束条件下的参数优选探索有效的方法。
1 栽植器端点运动轨迹分析与机构选择
1.1 栽植器端点运动轨迹分析
为保证丹参种苗裸苗机械化移栽的立苗率,根据陈建能等[11]提出的保证立苗率的新思路,以鸭嘴栽植器为末端执行器的膜上移栽机构在移栽丹参种苗时,丹参种苗落入穴中时应保持与垄面的垂直状态。
为确保上述垂直状态,鸭嘴栽植器在退穴过程中应尽量与垄面垂直,在鸭嘴栽植器退穴后,丹参种苗与其完全脱离之前沿移栽机构作业速度前进方向略微倾斜,根据丹参种苗与垄面线不低于80°的立苗率要求,倾斜角度不超过10°,即这一过程中鸭嘴栽植器与垄面线夹角不低于80°,以防止丹参种苗被栽植器推倒。这样在后续的覆土和镇压作用下,丹参种苗就会靠到沿移栽机前进方向一侧的穴口壁面,以保证立苗率。
相对和绝对运动轨迹如图1所示,绝对轨迹由鸭嘴栽植器端点相对机架的相对运动轨迹与机具水平方向运动轨迹合成。丹参种苗移栽深度为150 mm,株距为200 mm,为满足丹参移栽的农艺要求同时保证立苗率和升程要求,其绝对轨迹应满足:①绝对运动轨迹最低点与垄面线的垂直距离h1,即移栽深度为150 mm。②鸭嘴栽植器在回程过程中端点轨迹与垄面线的夹角β1尽量接近90°。③单个运动周期内绝对运动轨迹与垄面线的交点距离l,即入土、出土轨迹与垄面线的交点距离越小越好。④由于丹参植株在垄面线上露出的长度为50 mm,出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1不低于80°。⑤绝对轨迹升程h不低于300 mm。
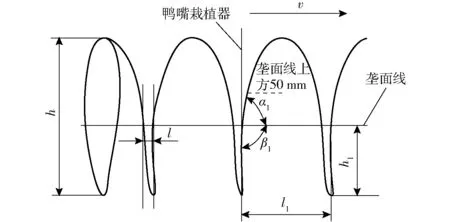
图1 鸭嘴栽植器端点轨迹分析Fig.1 End point trajectory analysis of duckbill planting apparatus
1.2 机构选择
五杆机构是具有多自由度最简单的闭环机构,机构相对稳定,具有较多的尺寸和角度参数、不同的驱动方式及传动比,可实现丰富的曲线轨迹,因此采用五杆机构作为栽植器端点轨迹的形成机构[12]。
对于五杆机构参数的求解,当前主要采用解析法与软件相结合的方法。马良等[13]由ADAMS软件建立参数化模型,寻求连架杆输出轨迹的改变规律;方芳[14]借助于计算机辅助设计的方法,研制了齿轮五杆机构的轨迹曲线生成系统;陶军等[15]经过仿真和试验验证了图解法与解析法相结合是确定齿轮五杆机构实现预定轨迹的有效方法;何小晶等[16]对五杆式移栽机构建立了运动学模型,并进行了参数分析。
以上研究皆从单一机构角度对五杆机构进行理论研究,未考虑机构应用时所处的实际工况环境以及五杆机构自由运动的约束条件。而本文所面对的工程实际问题中,在丹参移栽机构轨迹的大升程要求、移栽机构的空间约束条件以及五杆机构自由运动的基本约束条件下,如何得到满足丹参移栽农艺要求的机构参数组合是需要解决的首要问题。在建立约束条件和运动学模型的基础上,结合Matlab建立的辅助界面对机构进行运动学分析、轨迹绘制,寻求区域轨迹特性,并研究关键参数对轨迹的影响规律,根据机构轨迹的要求优选机构参数,以满足丹参移栽的农艺和大升程要求。
2 工作原理与模型建立
2.1 工作原理
五杆式丹参移栽机构示意图如图2所示,为便于机构的实际应用,设置双曲柄的传动比为1,即本文主要针对等速双曲柄五杆机构进行研究。曲柄OD与AB为原动件,以相同转速同向转动,进而带动连杆BL和DE摆动,栽植器FG与连杆DE以一定角度固连并在DE带动下进行移栽。
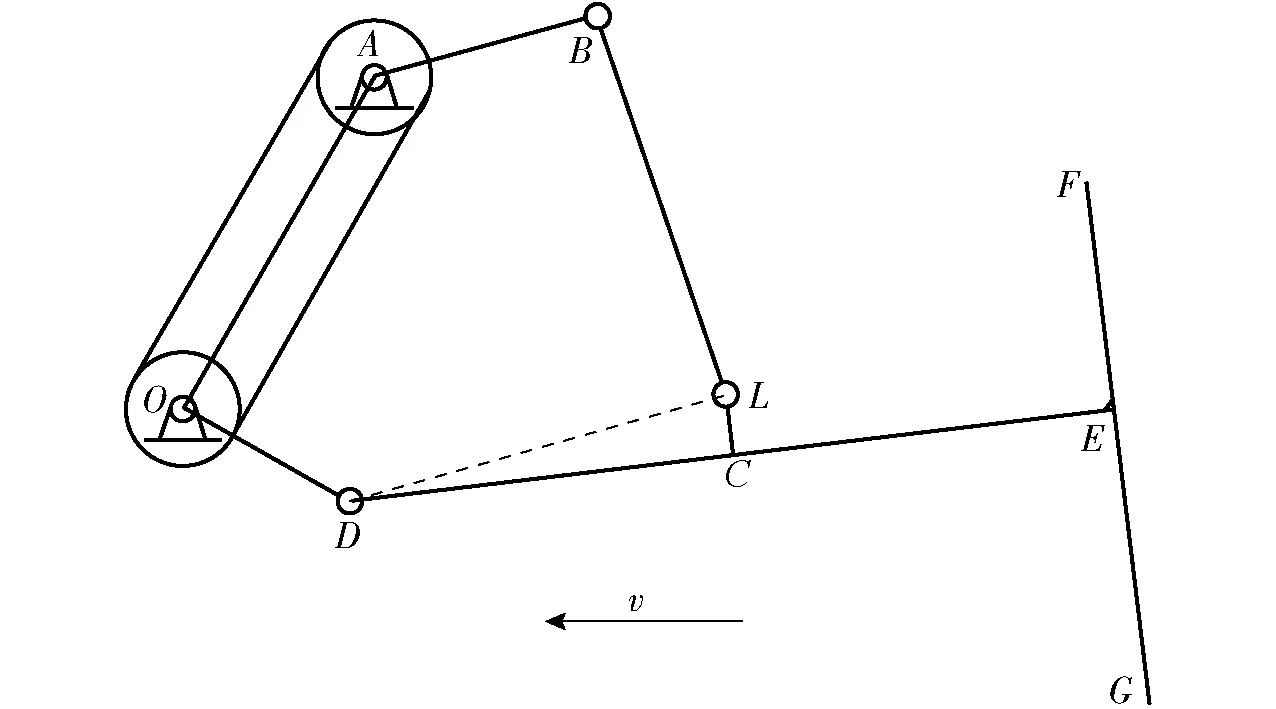
图2 五杆式丹参移栽机构示意图Fig.2 Schematic diagram of five-bar transplanting mechanism of Salvia miltiorrhiza
2.2 数学模型建立
以O点为坐标原点,水平方向为x轴、竖直方向为y轴建立直角坐标系,如图3所示。
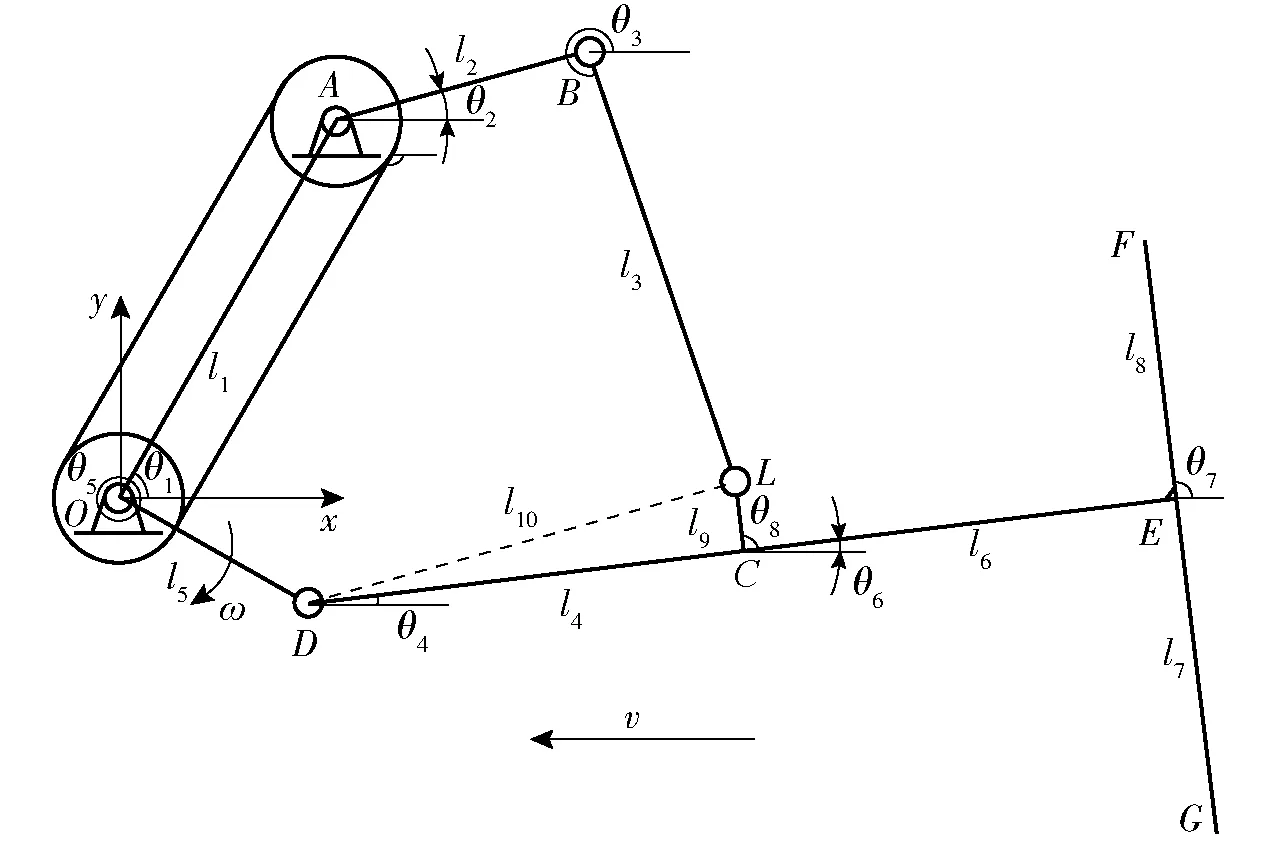
图3 五杆式丹参移栽机构数学模型Fig.3 Mathematical model of five-bar transplanting mechanism of Salvia miltiorrhiza
2.2.1运动学模型
D点的位移方程为
(1)
B点的位移方程为
(2)
根据矢量方程lOA+lAB+lBL=lOD+lDL可得L点的位移方程为
(3)
令
(4)

(5)
将θ3代入式(3)可求出θ4。
C点的位移方程为
(6)
E点的位移方程为
(7)
F点的位移方程为
(8)
G点的位移方程为
(9)
对式(9)求一阶导数和二阶导数,即可得鸭嘴栽植器底端点G的速度和加速度方程[16]。
2.2.2空间约束条件
为保证机构在整机安装及作业时与其他机构不发生干涉、碰撞,将机构布置为空间结构,其空间限制如图4所示。
(1)机架高度H1:为保证作业时丹参种苗顺利落入鸭嘴栽植器,要求机构所能达到的最高位置C′小于机架的高度,由图4可知,机架高度需满足
H1=H+l2+l1sinθ1+δ
(10)
式中δ——机构最高点位置距离机架的高度,mm
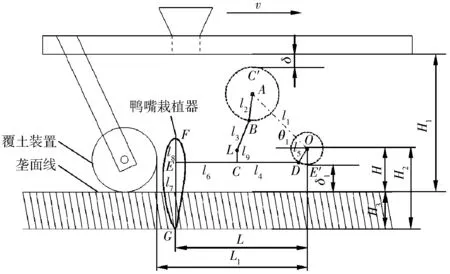
图4 五杆式丹参移栽机构空间限制边界条件Fig.4 Boundary conditions of five-bar transplanting mechanism of Salvia miltiorrhiza
(2)O点距离垄面线的高度H:为保证机具具有良好的通过性,要求H大于l5与E′距垄面线距离之和,即
H>l5+δ1
(11)
式中δ1——E′距离垄面线距离,mm
(3)移栽深度H3取值为150 mm。
(4)F点相对轨迹可行域的长度与高度L1、H2:本文设定L1为600 mm;H2为O点到移栽最深处的距离
H2=H+H3
(12)
(5)栽植器端点G与O点的初始水平距离L:在移栽过程中,要求该值在一定范围内越小越好。在l2、l5不变的情况下,可通过调节l3、l4和l9减小L。
根据市场上一般移栽机机架的高度[17],设定H1=720 mm,而移栽机构最下端E′与垄面线的距离应大于E点与垄面线的距离,取δ1>l7-H3,0<δ<10 mm,经分析可得
(13)
本文设定移栽机构机架初始长度l1和安装角度为290 mm和45°,根据机构轨迹升程不低于300 mm的要求,得到两曲柄以及初始安装角度的取值范围
(14)
2.2.3基本约束条件
设计的五杆机构属于双曲柄型,双曲柄均为匀速转速,为使机构形成完整封闭的运动轨迹,五杆机构各尺寸参数需要满足双曲柄存在的必要条件,必要条件是指两原动件按一定运动规律作整周运动时,五杆机构在每一时刻都满足装配条件[18-23]。
(1)五杆机构装配条件
五杆式丹参移栽机构数学模型见图3,其装配条件可表示为
(15)
式中lBDmax、lBDmin——铰接点B与D距离的最大值和最小值
令x=max(l3,l10),y=min(l3,l10),则有
(16)
化简可确定l3、l10取值范围为
(17)
(2)双曲柄存在必要条件
由运动学模型可得机构B点和D点坐标,曲柄AB和OD以相同角速度ω转动时,BD之间的距离lBD的几何关系为

(18)

(19)
式(19)是对时间t的非线性方程,借助Matlab搜索极值可能出现的范围,再利用fmin函数求出lBD的极值lBDmax和lBDmin。将lBDmax和lBDmin代入式(15)可得到l3和l10范围。
根据机构空间约束条件,初定l1=290 mm、l2=80 mm、l5=70 mm、θ1=45°、θ2=97°、θ5=118°,结合上述求解过程,得到l3和l10的取值范围
(20)
初定五杆式丹参移栽机构参数值为:l1=290 mm、l2=70 mm、l3=120 mm、l4=220 mm、l5=60 mm、l6=229 mm、l7=243 mm、l8=100 mm、l9=45 mm、θ1=45°、θ2=97°、θ5=118°、θ7=90°、θ8=90°。
2.3 人机交互可视化辅助界面
在上述建立的数学模型基础上,运用Matlab编写五杆式丹参移栽机构人机交互可视化辅助界面(软件著作权登记号:2017SR663379),如图5所示。
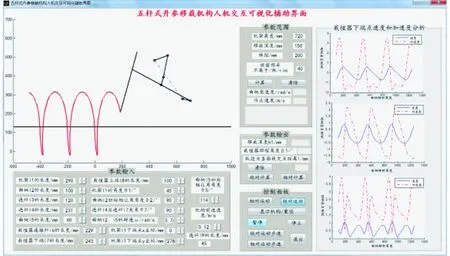
图5 五杆式丹参移栽机构人机交互可视化辅助界面Fig.5 Human-computer visual interface of five-bar transplanting mechanism of Salvia miltiorrhiza
该界面包括图像显示区、参数范围确定区、参数输入区、控制面板区、速度和加速度分析区以及结果输出区。通过该界面可先确定机构参数的基本取值范围,根据参数取值范围调整各参数,在图像显示区中进行直观定性的识别判断,在结果输出区定量比较分析,对设计参数进行调整得到符合丹参移栽农艺要求的轨迹。
3 轨迹区域分布特性与变化规律分析
3.1 轨迹区域定位
通过辅助界面模拟仿真发现,在其他参数不变的前提下,当DE与FG的夹角θ7取值不同时,轨迹的形状、大小及位置都会发生改变,图6为θ7在[0°,180°]内变化的各位置轨迹特性。区域1为θ7在[0°,80°)的各位置轨迹特性;区域2为θ7在[80°,100°]的各位置轨迹特性;区域3为θ7在(100°,180°]的各位置轨迹特性。

图6 区域轨迹特性Fig.6 Regional trajectory characteristics
根据轨迹长轴与水平方向的夹角,将轨迹分为3个区域。区域轨迹的变化规律为,θ7从0°到180°轨迹先向左侧倾斜然后再向右侧倾斜;长短轴比值逐渐变小;轨迹下端点在竖直方向上的区域范围变化呈一开口向上的抛物线。以区域2中轨迹为基准进行分析,区域1中轨迹向左侧倾斜,且长短轴比值较大,另结合实际移栽位置,区域1中的轨迹区域不符合要求;区域2中轨迹长轴方向与水平方向近似垂直,在θ7取90°时垂直度最好,轨迹区域下端点在竖直方向达到最大且长短轴比值较大但低于区域1;区域3中轨迹向右倾斜,轨迹区域向上方移动,长短轴比值逐渐缩小。
为满足丹参移栽的可行域要求,选择区域2中的轨迹特性作为目标。而对应θ7取值需结合后续轨迹分析进行判断和验证。
3.2 栽植器端点轨迹的变化规律分析
运用人机交互可视化辅助界面,通过改变五杆机构的关键参数得到相应的栽植器端点轨迹,根据辅助界面输出的轨迹参数结果,分析关键参数对相对和绝对轨迹的影响。
3.2.1l2与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变曲柄AB的长度l2,l2与栽植器端点轨迹之间的关系如图7所示。
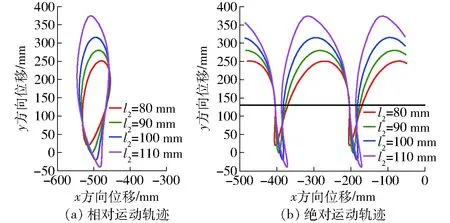
图7 l2与栽植器端点轨迹之间的关系Fig.7 Relationship between l2 and endpoint of trajectory
由图7可知,随着l2逐渐增加,栽植器端点相对运动轨迹逐渐向左侧倾斜,长短轴比值逐渐增大;绝对运动轨迹最低点与垄面线的垂直距离h1逐渐增大,鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1逐渐减小;单个运动周期内绝对运动轨迹与垄面线的交点距离l逐渐减小;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1逐渐增大。
3.2.2l5与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变曲柄OD的长度l5,l5与栽植器端点轨迹之间的关系如图8所示。
由图8可知,随着l5逐渐增加,栽植器端点相对运动轨迹逐渐向右侧倾斜,长短轴比值逐渐减小;绝对运动轨迹最低点与垄面线的垂直距离h1逐渐减小,鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1逐渐增大,单个运动周期内绝对运动轨迹与垄面线的交点距离l逐渐减小;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1逐渐减小。
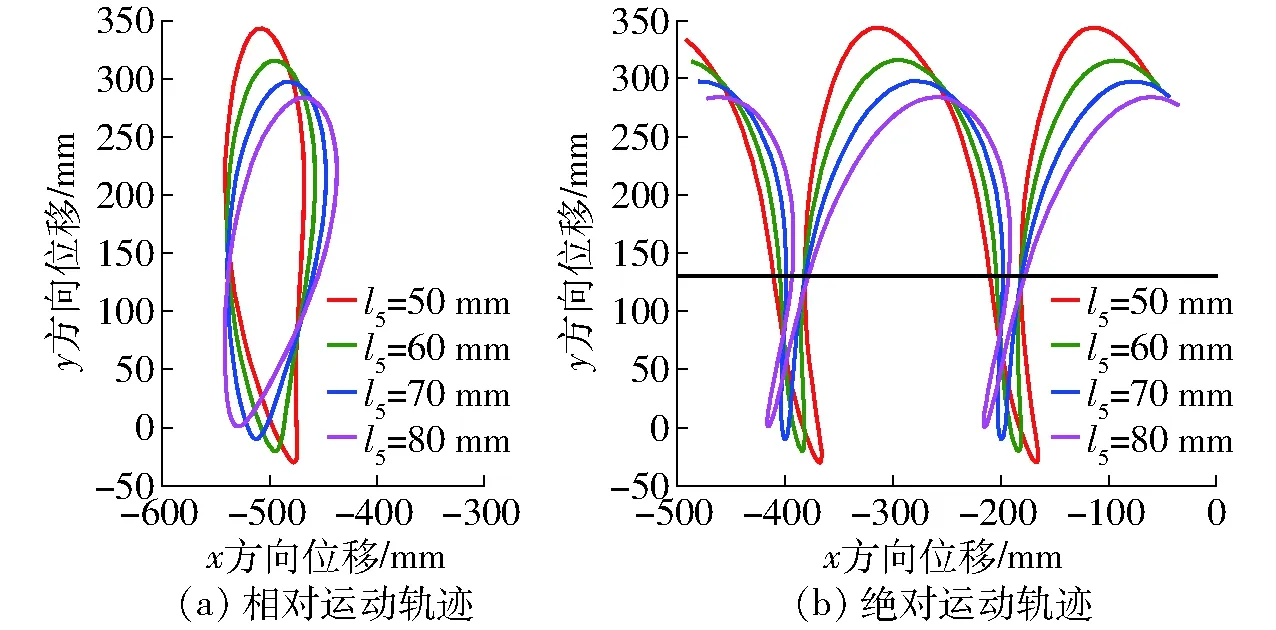
图8 l5与栽植器端点轨迹之间的关系Fig.8 Relationship between l5 and endpoint of trajectory
3.2.3θ2与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变曲柄AB的初始安装角度θ2,θ2与栽植器端点轨迹之间的关系如图9所示。
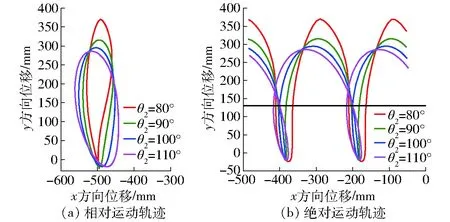
图9 θ2与栽植器端点轨迹之间的关系Fig.9 Relationship between θ2 and endpoint of trajectory
由图9可知,随着θ2逐渐增加,栽植器端点相对运动轨迹逐渐向左侧倾斜,长短轴比值逐渐减小;绝对运动轨迹中入土和出土轨迹发生交叉,变为绕扣型轨迹,绝对运动轨迹最低点与垄面线的垂直距离h1先减小后增大,但变化量较小;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1逐渐减小;单个运动周期内绝对运动轨迹与垄面线的交点距离l先减小后增大;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1先减小后增大,但变化量较小。
3.2.4θ5与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变曲柄OD的初始安装角度θ5,θ5与栽植器端点轨迹之间的关系如图10所示。
由图10可知,随着θ5逐渐增加,栽植器端点相对运动轨迹逐渐向右侧倾斜,长短轴比值逐渐增大;绝对运动轨迹中入土和出土轨迹发生交叉,变为绕扣型轨迹,绝对运动轨迹最低点与垄面线的垂直距离h1先减小后增大,但变化量较小;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1逐渐增大;单个运动周期内绝对运动轨迹与垄面线的交点距离l先减小后增大;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1先减小后增大。

图10 θ5与栽植器端点轨迹之间的关系Fig.10 Relationship between θ5 and endpoint of trajectory
3.2.5l3与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变连杆BL的长度l3,l3与栽植器端点轨迹之间的关系如图11所示。
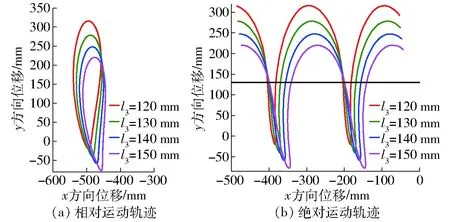
图11 l3与栽植器端点轨迹之间的关系Fig.11 Relationship between l3 and endpoint of trajectory
由图11可知,随着l3逐渐增加,栽植器端点相对运动轨迹形状、大小都不变,仅位置发生变化;绝对运动轨迹最低点与垄面线的垂直距离h1逐渐增大;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1基本不变;单个运动周期内绝对运动轨迹与垄面线的交点距离l逐渐增大;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1逐渐减小。
3.2.6l10与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变铰接点D和L的距离l10,l10与栽植器端点轨迹之间的关系如图12所示。
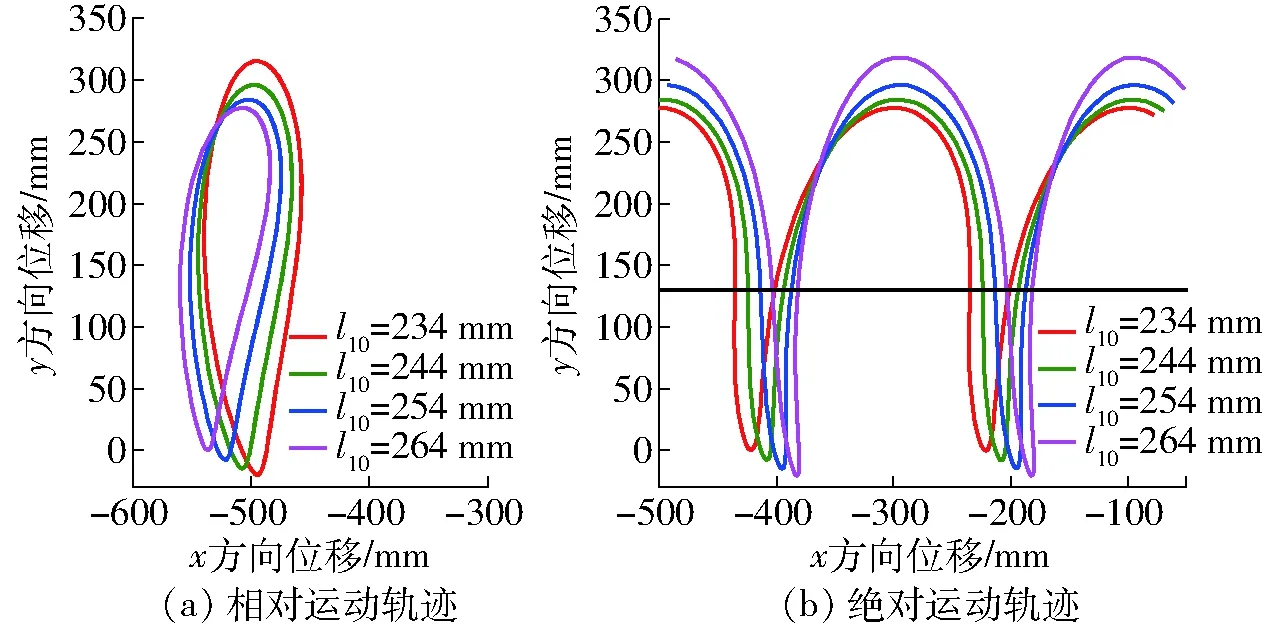
图12 l10与栽植器端点轨迹之间的关系Fig.12 Relationship between l10 and endpoint of trajectory
由图12可知,随着l10逐渐增加,栽植器端点相对运动轨迹形状不变,轨迹大小和位置发生变化;绝对运动轨迹最低点与垄面线的垂直距离h1逐渐减小;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1逐渐增大;单个运动周期内绝对运动轨迹与垄面线的交点距离l逐渐增大;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1逐渐减小。
3.2.7θ1与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变机架安装角度θ1,θ1与栽植器端点轨迹之间的关系如图13所示。
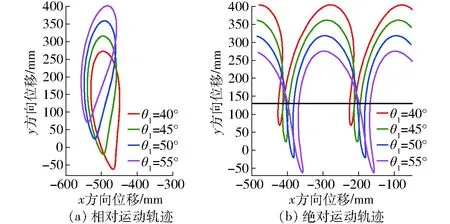
图13 θ1与栽植器端点轨迹之间的关系Fig.13 Relationship between θ1 and endpoint of trajectory
由图13可知,随着θ1逐渐增加,栽植器端点相对运动轨迹形状、大小都不变,仅位置发生变化;绝对运动轨迹最低点与垄面线的垂直距离h1逐渐减小;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1逐渐增大;单个运动周期内绝对运动轨迹与垄面线的交点距离l逐渐减小;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1先增大后减小。
3.2.8θ7与端点轨迹之间的关系
在初定的五杆式丹参移栽机构各参数中保持其余参数不变,改变栽植器FG与连杆DE的夹角θ7,θ7与栽植器端点轨迹之间的关系如图14所示。
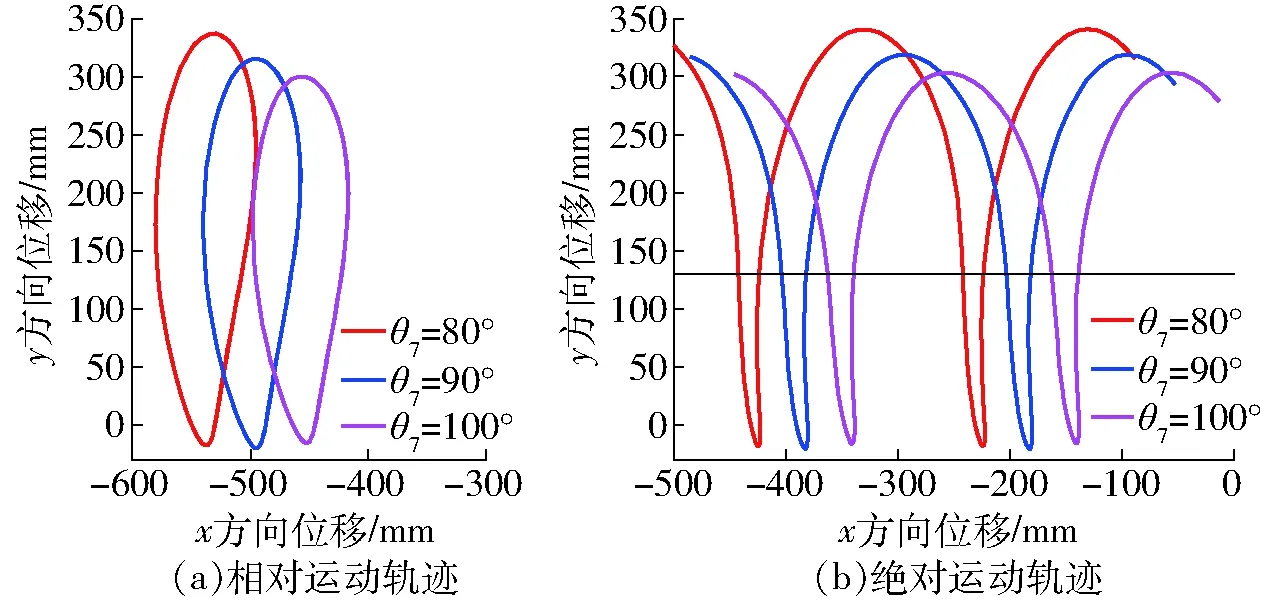
图14 θ7与栽植器端点轨迹之间的关系Fig.14 Relationship between θ7 and endpoint of trajectory
由图14可知,随着θ7逐渐增加,栽植器端点相对运动轨迹形状不变,位置和大小发生变化;绝对运动轨迹最低点与垄面线的垂直距离h1先增加后减小,90°时h1达到最大;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1基本不变;单个运动周期内绝对运动轨迹与垄面线的交点距离l逐渐增大;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1逐渐减小。
3.3 数值循环比较优选
上述机构参数对栽植器端点绝对轨迹参数h1、β1、l、α1的影响见表2。
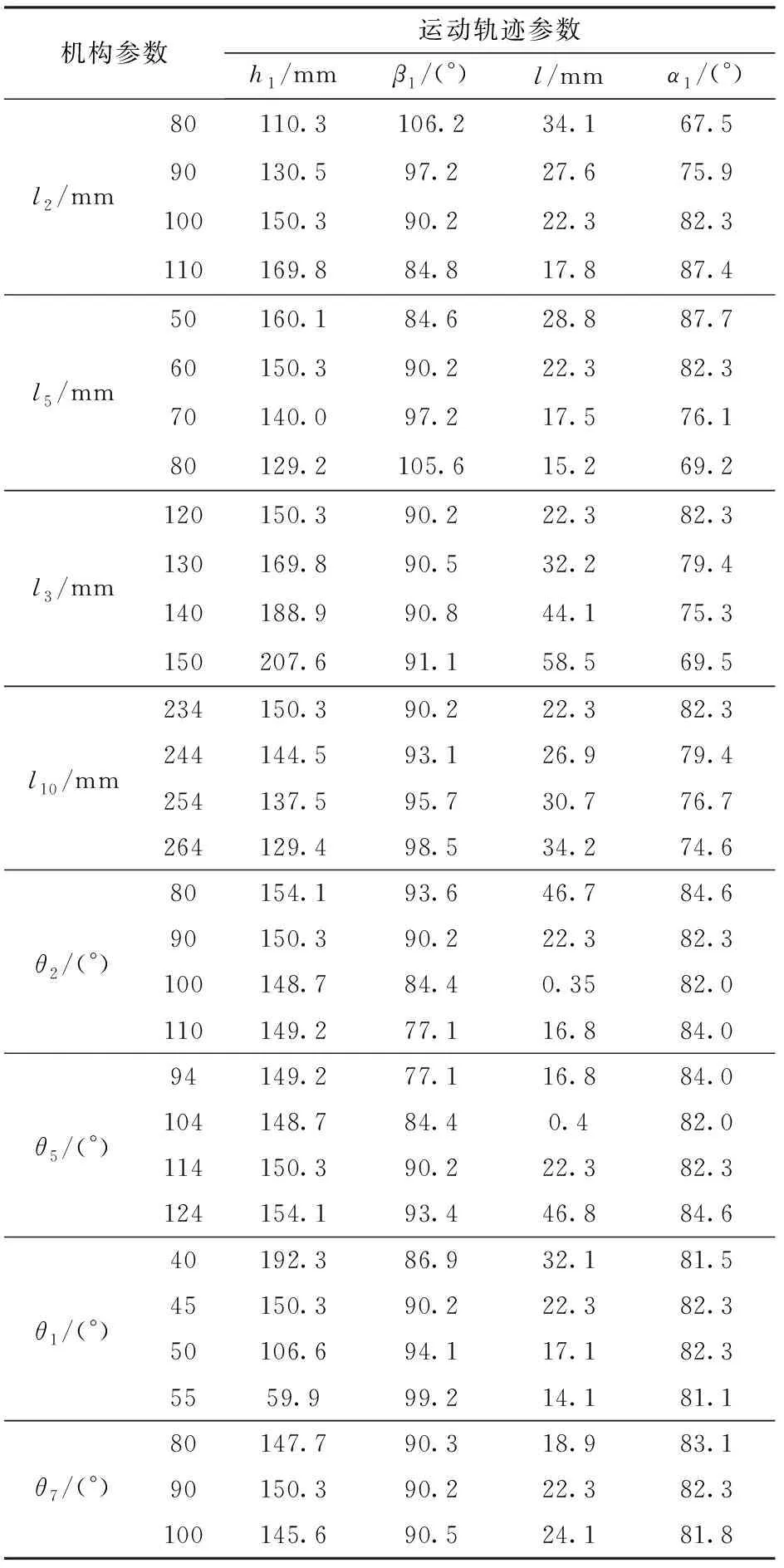
表2 l2、l5、θ2、θ5、l3、l10、θ1、θ7对栽植器端点绝对运动轨迹参数的影响Tab.2 Influence of l2, l5, θ2, θ5, l3, l10, θ1 and θ7 on absolute motion trajectory parameters of planting apparatus endpoint
条件约束及参数优选流程如图15所示,图中虚线框所示为数值循环比较进行参数优选的过程。优选的依据为:移栽深度h1最接近150 mm;鸭嘴栽植器在回程过程中端点绝对运动轨迹与垄面线的夹角β1最接近90°;出土轨迹从垄面线至竖直向上50 mm之间的轨迹与垄面线所呈夹角α1不低于80°,且越接近90°越好;入土、出土轨迹与垄面线的交点距离l越小越好。
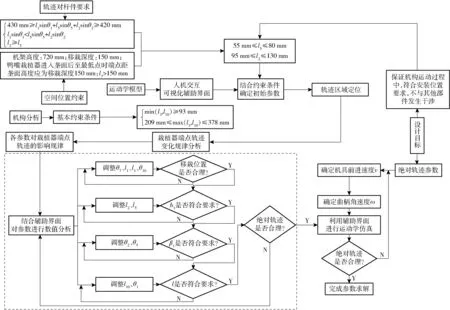
图15 条件约束关系及参数优选流程Fig.15 Flow chart of conditions constraint and parameters solution
根据参数优选流程图,最终优选出一组满足丹参移栽农艺要求的五杆式移栽机构参数组合:l1=290 mm、l2=100 mm、l3=120 mm、l4=231 mm、l5=60 mm、l6=229 mm、l7=243 mm、l8=100 mm、l9=45 mm、θ1=45°、θ2=90°、θ5=114°、θ7=90°、θ8=90°,辅助界面输出的相对和绝对运动轨迹如图16所示,其对应的绝对轨迹参数为:h1为150.3 mm、β1为90.2°、l为22.3 mm、α1为82.3°、h为345.6 mm。

图16 满足丹参农艺要求的栽植器端点轨迹Fig.16 Endpoint trajectories of planting apparatus to meet agronomic requirements of Salvia miltiorrhiza
4 机构设计与试验
4.1 机构结构设计
五杆式丹参移栽机构三维模型如图17所示,由双曲柄五杆机构、鸭嘴栽植器、凸轮控制机构和扇形平衡配重组成。
双曲柄五杆机构控制鸭嘴栽植器做往复运动进行接苗和移栽;鸭嘴栽植器是进行移栽的末端执行装置,负责将丹参种苗植入鸭嘴栽植器形成的穴中;凸轮控制机构控制鸭嘴栽植器开闭使丹参种苗由栽植器进入穴中;平衡配重用于平衡移栽机构的惯性力和惯性力矩。
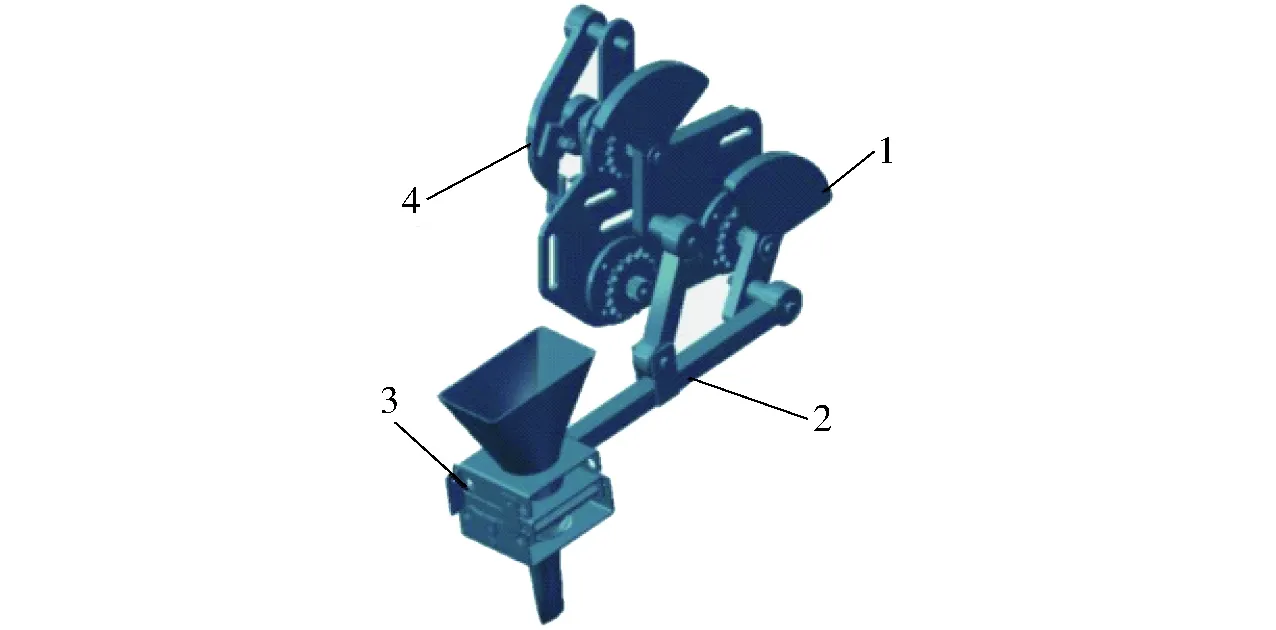
图17 五杆式丹参移栽机构三维模型Fig.17 Three-dimensional model of five-bar transplanting mechanism of Salvia miltiorrhiza1.平衡配重 2.双曲柄五杆机构 3.鸭嘴栽植器 4.凸轮控制机构
为提高鸭嘴栽植器与丹参种苗的匹配度,鸭嘴栽植器的相关参数根据丹参种苗植株形态参数确定。随机选取50株同一适栽期内的紫花丹参种苗,运用LA-S系列植物图像分析仪依次测量其植株形态参数,如图18所示。
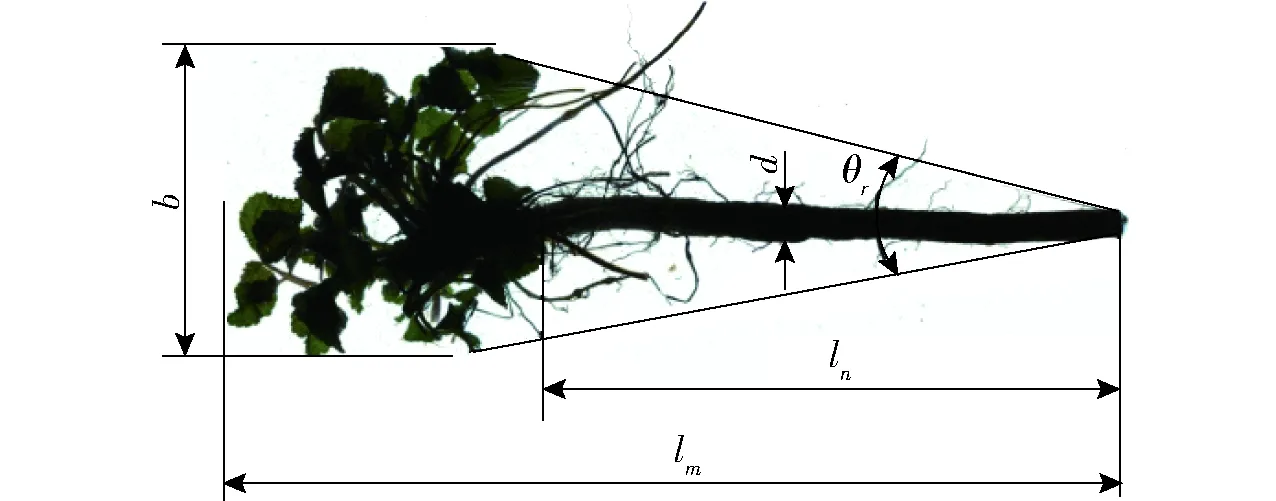
图18 LA-S系列植物图像分析仪系统提取的图像Fig.18 Picture extracted by LA-S image processing system for plant
图中θr——株形锥角,(°)
ln——根长度,mm
d——根直径,mm
lm——植株总长度,mm
b——植株幅宽,mm
测量结果如表3所示。
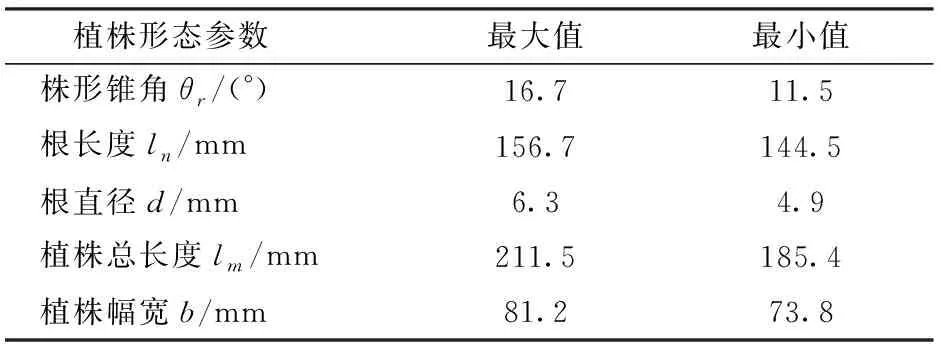
表3 丹参植株形态测量数据Tab.3 Measurement data of plant morphology of Salvia miltiorrhiza
由表3中的数据可得,栽植器鸭嘴总长度不低于植株总长度的最大值,选为212 mm;栽植器鸭嘴的锥角角度不低于株形锥角的最大值16.7°,选为17°;鸭嘴栽植器开口开度不低于植株幅宽的最大值81.2 mm,选为82 mm。
4.2 台架试验
台架试验是通过测量机构栽植器端点形成的实际轨迹情况,以验证数学模型的准确性以及人机交互可视化辅助界面的可靠性。
样机和试验平台如图19所示。试验平台由五杆式丹参移栽机构、YSJ-750型调速电动机(减速比:1∶15)、JAC580N型变频器(供电电压:380 V)、SJM12-10P1型霍尔式转速传感器(最大检测距离:10 mm)、160K-C-8GB型高速摄像机(2 000 f/s)、HHZ1型数显转速表(供电电压:220 V)组成。
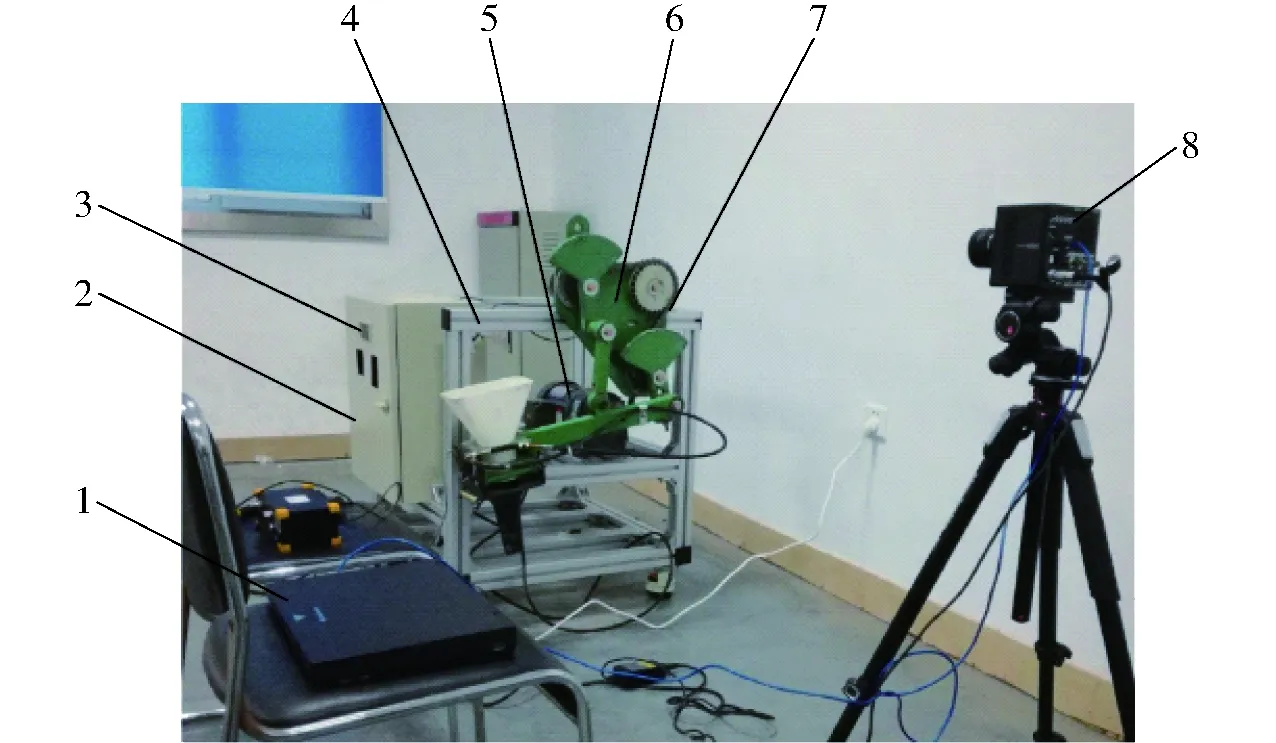
图19 试验平台Fig.19 Test platform1.计算机 2.变频柜 3.数显转速表 4.机架 5.调速电动机 6.移栽机构 7.霍尔式转速传感器 8.高速摄像机
通过高速摄像机测量五杆式丹参移栽机构样机实际相对运动轨迹,以便与软件仿真进行对比。利用高速摄像系统得到机构实际相对运动轨迹如图20所示。图16a理论相对运动轨迹与实际相对运动轨迹相比基本一致,验证了理论模型的准确性。

图20 移栽机构实际测量的相对运动轨迹Fig.20 Actual measurement relative motion of transplanting mechanism
4.3 田间试验
4.3.1试验条件
为验证移栽机构理论设计的正确性,试制了搭载五杆式丹参移栽机构的丹参膜上移栽机样机。该机采用25 kW轮式拖拉机牵引,其作业速度为0.25 m/s,根据上述作业条件对移栽机进行重复性田间试验,试验在山东省农科院药用植物研究中心实验基地进行,如图21所示。

图21 田间移栽试验Fig.21 Field transplanting test
4.3.2试验方法与设备
试验采用育苗基地培育的紫花丹参种苗进行大垄膜上移栽试验,按照我国旱地移栽机械作业标准(JB/T 10291—2013)进行,每次重复试验移栽200株丹参种苗,重复3次。丹参种苗平均长度约为200 mm,主茎的平均长度约为150 mm,记录并测定旱地移栽机械作业标准中的主要性能指标,其中丹参移栽的立苗程度以移栽后丹参种苗主茎与垄面的夹角α来判定:α≤45°为倒伏,α>45°为合格,α>80°为优秀[23]。
试验设备及参数设置包括:187-101型数显角尺(量程:0~360°)、卷尺(量程:1~3 m)、标杆和计时器等。
4.3.3试验结果
田间试验结果如表5和表6所示。
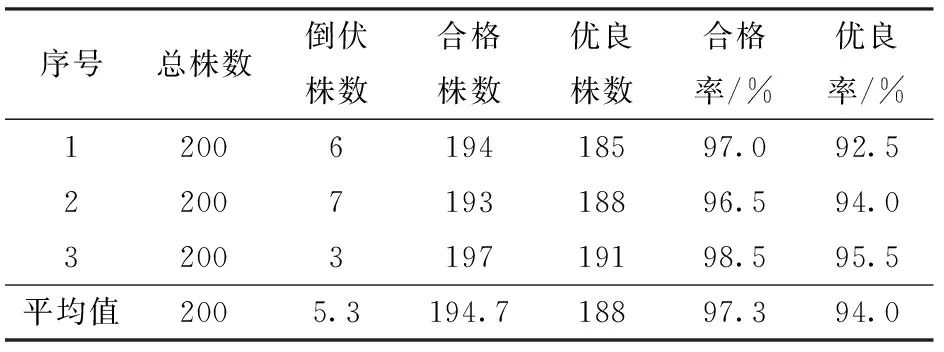
表5 丹参种苗立苗率测量数据Tab.5 Measurement data of seedling erectness rate of Salvia miltiorrhiza
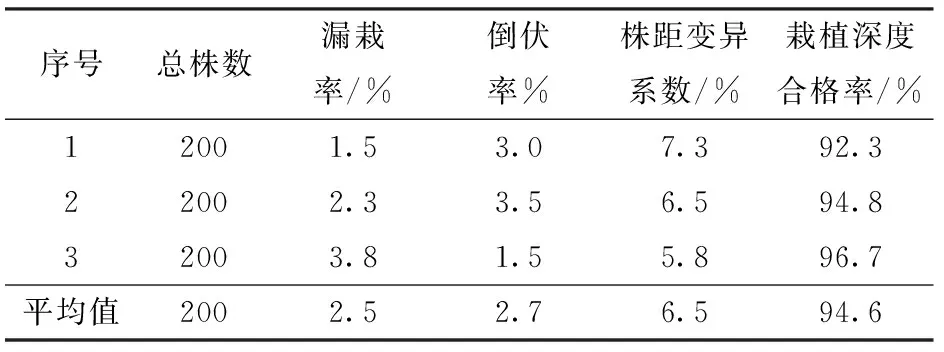
表6 主要移栽性能测量数据Tab.6 Measurement data of main transplanting performance
表5为丹参种苗田间立苗率测量数据,立苗合格率平均值为97.3%,满足旱地移栽机械作业标准中规定的立苗率要求,立苗优良率平均值为94%,满足丹参裸苗移栽的立苗率要求;表6为主要移栽性能测量数据,移栽性能满足旱地移栽机械作业标准中规定的性能指标,漏栽率平均值为2.5%,倒伏率平均值为2.7%,造成漏栽的原因是部分丹参种苗长有较多须根,在回程过程中鸭嘴栽植器闭合时夹住须根回带丹参种苗而引起了漏苗和倒伏;株距变异系数平均值为6.5%,是由于机器作业速度发生波动而引起;栽植深度合格率平均值为94.6%,究其原因是移栽试验田地形起伏以及起垄高度误差造成。
5 结论
(1)根据丹参移栽的农艺要求设计了一种五杆式丹参移栽机构,并建立了机构所处工况的约束条件、自由运动约束条件。结合机构运动学模型采用Matlab开发了人机交互可视化辅助界面,通过人机交互的方式进行轨迹区域定位分析,并获得了机构关键参数对鸭嘴栽植器相对和绝对运动轨迹特性的影响规律。
(2)借助辅助界面运用轨迹区域定位和数值循环比较法,优选出了一组满足丹参种苗移栽农艺要求,同时保证丹参立苗率的机构参数组合:l1=290 mm、l2=100 mm、l3=120 mm、l4=231 mm、l5=60 mm、l6=229 mm、l7=243 mm、l8=100 mm、l9=45 mm、θ1=45°、θ2=90°、θ5=114°、θ7=90°、θ8=90°。
(3)运用LA-S系列植物图像分析系统对丹参种苗植株形态特征参数进行了测量,根据特征参数得到了栽植器鸭嘴的设计参数:鸭嘴总长度为212 mm;鸭嘴锥形锥角为17°;鸭嘴开口开度为82 mm。
(4)研制样机进行了田间试验,结果表明五杆式丹参移栽机构立苗合格率为97.3%、立苗优良率为94.0%、漏栽率为2.5%、株距变异系数为6.5%、栽植深度合格率为94.6%,满足丹参种苗裸苗膜上移栽的农艺要求、作业质量和立苗率要求。
猜你喜欢
中国药房(2022年14期)2022-07-29
现代防御技术(2021年6期)2022-01-06
河北农机(2021年11期)2021-11-29
散文百家(2021年5期)2021-11-12
农业工程技术(2021年11期)2021-06-19
星星·诗歌原创(2021年2期)2021-04-01
装备制造技术(2019年12期)2019-12-25
孩子·小学版(2019年11期)2019-09-10
专用汽车(2018年10期)2018-11-02
饮食科学(2016年4期)2016-07-06