
基于双目技术的无人机自主三维定位方法研究
2018-09-19 09:41余莎莎刘泱杰胡永明顾豪爽
计算机测量与控制 2018年9期
余莎莎,黄 浩,刘泱杰,胡永明,顾豪爽
(湖北大学物理与电子科学学院铁电压电材料与器件湖北省重点实验室,武汉 430062)
0 引言
无人驾驶飞机 (Unmanned Aerial Vehicle,UAV)简称无人机,不同于有人驾驶飞机,它是一种无需飞行员控制,可以在远距离操纵飞行系统的自主飞行器。由于其体积较小、造价较低、机动性较强、隐蔽性较好等突出优点,在21世纪被越来越多地应用在军事侦查、目标追踪、地形勘察等领域[1]。
从技术角度的定义可以将无人机进行划分,但无论是哪种类型的无人机,其完成军事侦察、目标追踪、地形勘察的前提都是获得自身的精确定位[2]。目前高空高速无人机大多采用精密惯导与GPS的组合导航来获得无人机的实时位置。虽然目前组合导航的精度已经十分地高,但也仅能获得无人机的二维位置信息。
另外,用于导航的高精密设备造价高、体积大,而用在军事中的微小型无人机受到成本限制且载荷有限,无法搭载导航所需的高精密设备。且军用无人机不仅需要工作在无遮挡的室外环境中,也需要工作在有遮挡的复杂场景,如城市和森林等。在这些难以获得GPS的场景下,无法得到无人机的二维位置信息。为使无人机工作在各种复杂场景中,需要设计不以GPS信息为基础的短距离、高精度的三维定位方法。
文献[3]从无人机的需求出发,考虑到小型无人机飞行时的速度、高度和角度等状态参数,采取将GPS和AHRS以及气压测高计相结合的组合导航,通过硬件设计和复杂算法,使得到的控制飞行状态参数满足需要,最后通过实际操纵飞行进行验证。文献[4]将天文导航技术应用到无人机自定位上,对多星和单星定位算法进行了重点推导;并对这两种算法进行了细致的分析和比较,并在保持前提条件相同的情况下下进行仿真和分析定位误差。文献[5]对微小型无人机在无GPS的环境下的自定位技术进行了研究,通过选择成本低、质量小的器件,基于智能机器人控制系统构建无人机自定位技术的总体架构,探索出易集成、硬件所需成本低的新型定位技术。基于微机电系统展开对定位架构的研究,参考了当前不同场景下的自定位算法思路,并通过观察各种算法在无人机的环境适应性,最终探索出一种能适应复杂环境变化及低参数依赖性的自定位框架。
无人机自主三维定位具有很强的自适应能力,可以再不同场景下快速有效地对自身进行定位。它是指在无人为操纵的条件下,自身的系统感知环境和处理信息[6]。基于双目技术的无人机自主三维定位是指通过固定在无人机上的两个摄像头采集图像,经过图像处理、图像匹配和计算得到无人机与预设定点之间的距离,再经过坐标变换计算得到无人机的三维位置坐标的方法。所有的工作均由无人机及其装载装备完成,因而具有导航自主性。
基于双目技术的无人机自主三维定位技术与现有的无人机定位方法比,其定位设备可靠,设备依赖性较小[7];而且不受时间、地点和环境的限制,其定位误差既不随时间的增加而增大,也不会因航行距离的增大而积累。不同于需要收发电磁波的GPS定位,它不需要设立陆基台站和向空间发射轨道运行体,完全是一种被动式自主测量[8]。此外,不受电磁波的干扰破坏,其可靠性高、隐蔽性好、生命力强,当卫星导航遭受到信号干扰或人为破坏时,启用基于双目技术的自主三维定位无疑更具有深远的意义。
综上所述,基于双目技术的无人机自主定位方法不仅可以为在不同场景下飞行的无人机提供更为精准的三维导航信息,它同样也是被动定位的基础;同时,在当今军事战争愈发地强调隐蔽性的趋势下,研究无人机三维自主定位,在用于军事战争的无人机上具有广泛的应用前景。
1 双目技术原理
双目视觉技术是计算机视觉的重要技术之一,由于具有人工智能性,双目视觉技术被广泛应用在多种领域,比如:将双目视觉技术应用在手术机器人上,通过在体外观测手术器材的运动状态和姿势,从而完成对手术器材的精确控制;双目视觉技术在汽车上的应用,可以检测到道路信息,反馈给司机实时路况和随时可能发生的危险;双目视觉技术还可应用于助盲导航,从而代替导盲犬更加有效地帮助外出行走的盲人[9]。
双目视觉技术是用计算机对人的双眼进行模拟,从而感知世界。通过固定的双目摄像头同时从不同角度采集两幅图片,经过立体匹配技术得到目标物在图片上的匹配点以及每一点的视差,即该场景中的目标物在双目摄像头上投影点的差距,由得到的视差值可以恢复三维场景中目标物的深度信息[10]。
在双目立体视觉系统中,两个固定安装的摄像机作为图像信号的采集设备,图像捕捉卡将图像视频信号经处理后传送到计算机或信号处理设备上[11]。最简单的双目立体视觉系统,如图1所示,两个摄像机沿基线放置,使得Zr//Zl//Xa,Zr为左摄像的光轴,Zl为右摄像头的光轴。
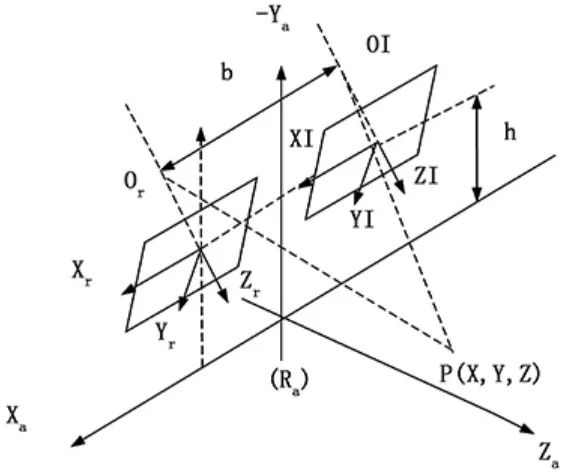
图1 双目视觉系统的几何原理
将物体抽象为质点,如图2所示,当两个或多个物体与摄像机镜头的光心呈一条直线时,在所得照片上的显示则为一个点,也就意味着从相片上并不能辨别出这些不同的物体[12]。而双目视觉利用两个摄像机从不同位置进行摄像,根据两者所成的像在两个相片中对应点的关系来计算物体的深度信息。

图2 双目视觉中的匹配点
根据双目立体视觉的物理图像和成像原理可以抽取出如图3所示的几何关系。
则深度Z的计算公式为:

其中:B为基线 (baseline)的长度,表示两个相机光心的距离;f为相机的焦距;d为视差。

图3 双目视觉中的几何关系
从公式 (1)可以看出,P点距摄像机的垂直距离与双目摄像机的基线长度B和摄像机的焦距f成正比,与视差d成反比。在成像过程中,双目摄像机的基线长度B和焦距f保持不变,拍摄出的物体与双目摄像机的距离与通过算法计算得到的视差成反比。两幅图像中计算得到的视差值越小,物体距离摄像机越远。得到二维图像的视差图后,便可以通过公式变换得到该幅图像每一点的实际距离,从而重建出该相片所拍摄场景的三维几何模型。
2 基于双目技术的无人机自主三维定位
2.1 无人机自主三维定位流程
无人机自主三维定位流程如图4所示,其包含4个主要步骤,总结如下:
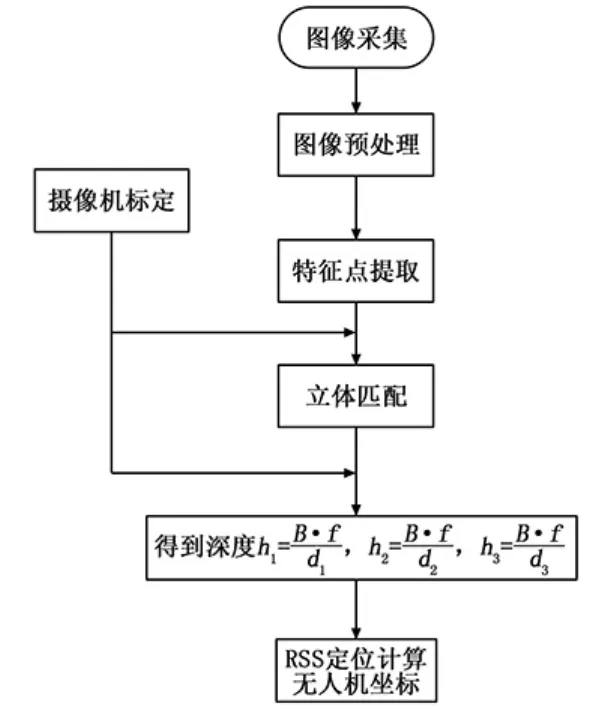
图4 无人机自主三维定位流程图
1)将两个相同的摄像机安装在无人机底部并规定原点和坐标系,选取地面的3个已知坐标的固定点为参考点;
2)对双目摄像头进行标定,同时采集地面的图像,并对采集到的图像进行预处理,提取特征点;
3)将采集到的图像与3个定点进行图像匹配,得到无人机与3个定点的距离分别为:

4)用RSS定位算法估计无人机的三维几何位置值。
2.2 无人机的双目测距实现
无人机自主三维定位方法是将双目摄像头安装在无人机机身上,通过采集并处理图像,获得无人机上的待测点与已知坐标的定点之间的深度信息,再通过定位算法计算得到无人机的三维坐标值。
双目摄像头固定在无人机的底部,左右摄像头对称于机轴,摄像机光学中心的连线平行于水平线,已知基线长度为B。规定水平面为xoy面,与水平面垂直向上的方向为z轴方向,并选择合适的原点 (该原点是参考原点,对定位精度无影响)。在地面上放置3个不在同一直线上的定点标记,它们形状不同 (或为3个已知坐标的房屋、建筑等物体),选取的标准为在无人机活动范围之内的任何位置都可以被双目摄像头捕捉到。已知定点的坐标分别为P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3)。

图5 三维定位几何示意图
在无人机进行三维自主定位之前,首先对两个摄像头进行自标定,得到摄像机的内部参数 (焦距f、成像原点、畸变系数)和双目镜头相对位置关系 (旋转矩阵和平移常量)。根据摄像头标定后得到的内部参数和相对位置分别对左右图像进行消除畸变和行对准,使得两摄像头光轴平行、成像平面共面、对极线行对齐。
将两摄像头在同一时间捕获到的图像与已知的定点标记图像进行匹配,通过搜索左右像机采集的图像中的3个定点标记来确定匹配位置。如图5所示,无人机在空中飞行的时候,在地面上观测到的无人机为一个足够小到可以忽略体积大小的点,因此可以将双目摄像头抽象为在光心连线中点的质点M。图中,P1,P2,P3为3个标志物中坐标已知的点,h1,h2,h3分别为点P1,P2,P3到待定位节点M的距离。
2.3 RSS定位算法距离估计
RSS(Received Signal Strength)定位是基于距离的定位,距离估计的精确程度间接反映了定位的精确程度。假设待定位节点M的坐标为 (x,y,z),由双目技术测得M点到3个已知定点的距离分别为h1、h2、h3,则有:

此时,M点的坐标 (x,y)可以通过求解下面两个线性方程获得。对式 (2)可以重新整理成矩阵形式:

A和B是由实际参数确定的已知向量,X为需要求解的未知向量,可用最小二乘法来求解该矩阵方程。最小二乘算法可具体描述如下:
根据上式定义残差值e:

残差的平方:

至此定位问题可转化为求f(X)最小值的问题。对f(X)求导并令其为零:

可以得到X的解:

所求的X的解即为无人机获得图像时的横纵坐标坐标。
根据已经求得的横纵坐标 (x,y)可以推算出无人机的高度

至此解算出无人机的位置坐标 (x,y,z)。
3 系统仿真与结果分析
3.1 系统仿真
为检验所提方法的有效性与优越性,将通过MATLAB仿真来评估该三维自定位算法的性能。仿真数据均为归一化的结果。设定无人机在空中以0.95 m/s的速度向与x正半轴成54.43°,与z轴正半轴成29.74°的方向匀速运动。点(0.1,0.2,0.3)为无人机匀速飞行中的一点,并假设该点为0 s时无人机的起始位置。
任意选取3个定点坐标分别为P1(0,0,0),P2(0.1,0.7,0),P3(0.3,0.2,0)。双目摄像头经过过图像采集、摄像机标定、图像预处理,双目立体匹配等步骤得到无人机 0.1 s,0.2 s,0.3 s,0.4 s,0.5 s,0.6 s,0.7 s,0.8 s,0.9 s,1.0 s时与已知定点的距离。令无人机在第0.1*i秒与Pj点之间的距离为hi,j,其中i=1~10,j=1,2,3,所得的数据如表1所示。
对无人机自主三维定位方法进行系统仿真,输入表1中的数据,采用上文描述的RSS定位计算方法,计算出无人机每个时刻的三维位置坐标。将每个时刻的三维位置坐标点连接成一条平滑的曲线,由此得到无人机0到10 s内匀速运动的轨迹。无人机的三维运动轨迹如图6所示。

表1 无人机与已知定点的距离

图6 无人机在三维空间中的运动轨迹
3.2 结果分析
令Mi为第0.1*i秒无人机的实际位置坐标,已知无人机每一时刻的定位如表2所示。

表2 无人机的实际位置
比较表2中的坐标和图6中无人机在对应时刻坐标,结果表明:本文提出的无人机自主三维定位方法与实际的三维位置几乎无差别,该定位方法的精确度较高,定位效果较为理想。
4 总结
基于双目技术的无人机自主三维定位方法,改善了传统GPS定位的维度缺失和场景限制等缺点,使无人机的工作场景不再局限于室外无遮挡的环境,而且可应用在室内、森林和城市等弱或无GPS信号的复杂环境。且双目摄像头较传统定位方案,具有成本低、载荷轻、体积小、不受电磁干扰等特点,较适用于高精度勘测侦查用途的微小型无人机。基于双目技术的无人机自主三维定位方法通过Matlab仿真验证,结果表明:本自主定位方法实现了无人机的实时精确定位,与无人机的实际位置匹配度高,定位效果较理想。
猜你喜欢
农业工程学报(2022年8期)2022-08-08
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
青年文学家(2022年10期)2022-04-25
江苏农业科学(2022年6期)2022-04-15
今日农业(2021年21期)2021-11-26
教育周报·教育论坛(2021年21期)2021-04-14
市场周刊·市场版(2019年55期)2019-12-08
办公自动化(2016年18期)2016-12-17
办公自动化(2016年18期)2016-08-20
新闻前哨(2015年2期)2015-03-11
