
基于stc89c52的寻迹避障智能车研究
2018-09-28 00:12张立臣肖松平张琦
智富时代 2018年8期
张立臣 肖松平 张琦
【摘 要】随着人们生活水平的不断提高,越来越多智能化的产品走进了我们的生活,例如无人驾驶的汽车、快递机器人等。这些产品极大的便利了我们的生活。本文设计了一种寻迹避障智能车,以STC89C52RC单片机为控制芯片控制电动小汽车的速度及转向;通过安装红外对管检测黑线,从而实现小车自动循迹功能;利用超声波模块检测行进方向上的障碍,实现避障功能。小车电机驱动由L9110驱动电路完成,速度由单片机输出的PWM波控制。最终完成小车自动寻迹避障调速,与此同时附加红外遥控控制,使其操作更加灵活方便。为智能化的进一步研究打下基础。
【关键词】STC89C52;L9110;红外遥控
随着自动化、智能化的飞速发展,产品设计的要求也越来越高,从自动分拣的流水线到无人驾驶的汽车,人工智能机器人等这些都离不开电力电子技术,而其中无人驾驶汽车、自动运输的快递车能够代替人来完成一些特殊任务,一方面减少了人员伤害,另一方面节约了人力资源,这些都为我们的生活提供了极大的便利,而我们这次所做的设计就是关于寻迹避障智能车,希望通过这次智能车的设计为以后的工作和更深入的学习打下基础。
一、系统方案基础
(一)器件选取
1.驱动模块
在驱动模块上我们考虑了L298N和驱动模块L9110s,经过分析L9110s将分立电路集成在单片IC之中,这也就使得外围器件成本极大的降低,相对的可靠性提高。加上该器件结构简单操作方便非常适合智能车的设计。同时该芯片具有良好的抗干扰性。
2.红外寻迹模块
红外寻迹模块主要选取了TCRT5000模块[2],主要是因为在本设计中,当寻找黑线时,如果扫描到黑线则被吸收,输出高电平,反之则输出低电平,进而控制电机转动方向,实现前进和转向功能。
3.超声波避障模块
我们选取了HC-SR04器件[3],一方面其成本低廉,其次管脚较少,结构简单便于操作。超声波测距模块[3]当发射端发一个10US以上的高电平,就可以在接收端监测是否有高电平输出.一但有输出就可以打开开定时器计时,当接收端变为低电平时则根据定时器的值,即为此次测距的时间,算出距离.如此不断的周期测,就可以达到不断检测的值。
(二)智能车设计概述
智能小车采用前轮驱动,前轮左右两边各用一个电机驱动,通过控制左右两个轮子分别正转和反转,从而达到控制转向的目的,后轮是万象轮,起支撑的作用。将循迹光电对管分别装在车体下的左右。当车身下左边的传感器检测到黑线时,芯片控制左轮电机反转,右轮正转实现左转,当车身下右边传感器检测到黑线时,主控芯片控制右轮电机反转,车向右转。避障的原理在车身前方装有超声波传感器,当其检测到障碍物时,主控芯片给出信号报警并控制车子停止、右转,再次感应重复上述操作,从而避开障碍物。
二、智能车总体设计
(一)总体设计方案
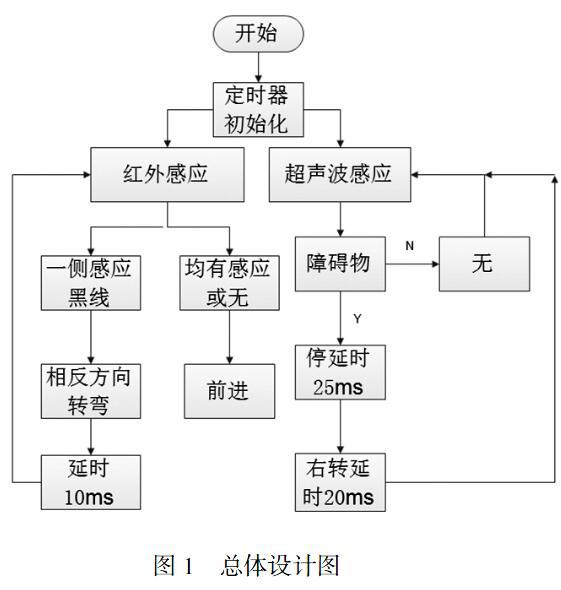
智能车整体分为三部分,首先是驱动实现小车的运动,其次是通过红外对管进行循迹,通过对电机转速的控制实现转弯,最后是超声波避障功能躲避障碍物,下面是我们的整体设计图。
(二)主要设计介绍
1.寻迹模块设计
初始化进行红外检测,一旦出现偏离情况,则调用电机驱动程序,做出相应转向,延迟10ms之后马上进行下一次判定是否偏离,如果还偏离则仍旧做出相应转向,延迟10ms后继续判断,直到正常为止,调用直行程序前进。在寻迹时有两种方法,一种是两个都是放置在黑线内侧紧贴黑线边缘,第二种是都放置在黑线的外侧,同样紧贴黑线边缘。所以在这里我们在书写程序的时候如果都在外侧或者都在内侧都会驱动前进,否则就是转向判断。
2.避障模块设计
避障过程中,通过超声波探测距离,不断修改程序以及小车自身的速度进行调节确定最合适的避障距离,之后在延时继续重复操作完成避障。当距离小于10cm时,启动避障程序,小车先停止延时[4]20ms,之后右转延时10ms,再次检测距离是否还存在障碍物,重复上述操作,完成避障,前进。
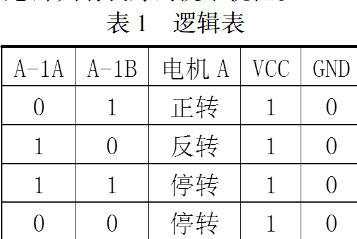
3.驱动模块设计
驱动模块我们采用L9110S模块同时驱动两个电机,当电机一个输入为高一个输入为低时则对轮子进行驱动正转,相反时则进行反转,控制两个轮子同时正反转完成前进后退操作。当需要转弯时,根据延时设计,一个轮子正转另一个轮子延时停止、正转、停止不断重复平稳转弯。
(三)设计成果
完成了由STC89C52RC芯片控制驱动模块、红外寻迹模块、避障模块几部分,实现小车的寻迹避障功能,并且能够手动调节速度,且拥有红外遥控控制功能,做成了所谓的遥控车。
调试时,正常情况下前进,当车身下左边的传感器检测到黑线时,单片机控制实现小车的快速左转。当车身下右边传感器检测到黑线时,与左转情况相反。在车身正前方装一个超声波探测器,当其检测到障碍物时,单片机给出信号并控制车子停止,当障碍物移除后,小车[5]继续按黑线循迹前进。调试从5次成功1次到最后全部成功。
三、结论
小车制作成品,能够很好的完成黑线寻迹避障且避障之后缓慢调整重新寻找黑线轨迹,继续完成按轨迹行走,进而完成一系列的任务。智能车的寻迹避障的实现是智能化的基础也是未来实现更高自动换产品设计的基石,我们可以根据智能車的设计附加其他功能来便利人们的生活水平进而更好地为社会服务。
【参考文献】
[1] 郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,2009.
[2]王超艺,王宜怀.基于红外传感器的自寻迹小车控制系统的设计[J].电子工程师,2008,34(11):60-62.
[3]张萍.超声波避障智能小车的设计[J].自动化仪表,2017,38(09):40-43.
