
基于偏振成像的机场跑道异物检测系统设计
2018-10-10 11:11郑吉
数字技术与应用 2018年7期
郑吉
摘要:本论文提出了将偏振成像技术应用于机场跑道低对比度异物检测领域,在能见度低的天气中检测识别机场跑道异物,从而提高检测系统环境适应性与探测能力。通过实验结果表明:偏振成像能提高目标对比度,减少杂散光干扰,有效提高机场跑道异物检测系统环境适应性与探测能力。
关键词:偏振成像;机场跑道;异物
中图分类号:TP391 文献标识码:A 文章编号:1007-9416(2018)07-0134-03
1 引言
机场跑道异物简称FOD,这是Foreign Object Debris的缩写,泛指可能损伤航空器或系统的某种外来的物质,常称为跑道异物。机场跑道异物对飞机起飞和降落的危害极大,全行业FOD事件统计,每一万架次的飞行事件中就有4-5次FOD致命事件发生,每一万架次的事件造成的直接损失平均费用在32333美元,间接损失至少在这个基础上的10倍[1]。FOD的种类相当多,如飞机和发动机连接件(螺帽、螺钉、垫圈、保险丝等)、机械工具、飞行物品(钉子、私人证件、钢笔、铅笔等)、野生动物、树叶、石头和沙子、道面材料、木块、塑料或聚乙烯材料、纸制品、运行区的冰碴儿等等。FOD危害非常严重,有许多事例表明,机场跑道上的异物很容易被吸入发动机,导致发动机失效。碎片也会堆积在机械装置中,影响起落架、襟翼等设备的正常运行。
偏振成像技术作为一种新型的探测技术,不仅可以探测目标的强度信息,还能从光强、光谱、空间、偏振度、偏振角、偏振椭率和旋转方向获得成像信息。相比于光强成像,在低对比度目标探测领域具有显著优势。同时偏振成像具有穿云透雾成像的特点[2],增强目标识别的精确性和可靠性,它为目标的检测、识别提供了一种新的技术手段。
本系统提出将偏振成像技术应用于机场跑道低对比度异物检测领域,相比与传统光强探测手段,偏振成像探测系统具有信息量大的特点。
2 國内外研究现状
2.1 国外研究现状
国外对于机场跑道异物检测系统,早在2000年就有提出。英国Qinetiq公司首先开发了Tarsier Reader系统,通过工作在94.5HZ频率的连续波调频雷达对跑道进行扫描,可以定位0.01平方米的异物,分辨率达到20cm;美国TrexEnterprise 公司的FODFinder车载移动监测平台,由硬件监控系统和软件处理平台构成,硬件系统包括雷达发射接收设备,高精度GPS和摄像系统构成,软件是相应的图像处理提取异物软件[3];新加坡Stralechststems公司开发了Iferret光学探测系统,采用每隔一段距离安装高清摄像机,自动探测跑道上的异物,检测大小为2cm的跑道异物[4],这些FOD系统在硬件上大都采用了高清摄像机加上精确GPS定位等设施,在图像处理软件算法上区别很大。目前国外利用图像处理对机场异物进行预警的方法,主要有几种类型,有文献提出了利用合成孔径雷达图像的检测算法,利用相应的图像转换技术和分割技术对图像进行处理后识别跑道上的异物;还有文献针对机场跑道恶劣天气条件下图像分辨率低的问题,提出了热成像和偏振成像结合的检测识别算法;还有的文献提出了复杂背景下基于h/q分解和迭代贝叶斯分类的跑道检测算法;还有文献提出了利用增强的SAR图像来进行边缘探测的方法。这些方法在分辨率和清晰度方面尚有很大的改善空间。
2.2 国内研究现状
国内的机场跑道异物检测技术研究处于初步阶段,2009年,国家民航总局机场司民航局安全技术中心编写了“FOD防范手册”,为我国FOD监测系统提供了标准化参照。2010年有文献记录相关的研究工作,大多集中在高等院校、科研院所的理论研究阶段。比如电子科技大学和北京交通大学的研究人员采用雷达检测对FOD检测识别进行了深入的研究[5];上海交大对基于红外与可见光图像的机场跑道异物检测与识别进行了研究;民航飞行学院对FOD检测系统的定位算法进行了深入的研究。国内还有相关的企业对机场跑道异物检测设备进行了研究和开发,比如长春的光电公司研发的基于光学FOD检测系统,通过光学成像对机场跑道大于5mm的异物进行了实时的监测定位及报警;成都的公司也研究开发了基于毫米波的雷达FOD检测系统;深圳的科技公司开发的“机场跑道数字化监控预警系统”;上海的网络通信有限公司开发了“飞机起降跟踪和跑道搜索系统”。但是,由于系统的性能差距,这些产品实际鲜有应用。
3 项目研究的主要内容
本项目提出将偏振成像技术应用于机场跑道低对比度异物检测领域,在目前使用的机场跑道异物检测系统中,在白天可见光线充足情况下,系统检测识别异物的能力很强,有的系统达到毫米级别FOD检测能力[6]。
3.1 系统方案设计
在实际应用中,机场跑道异物识别系统的性能受天气状况影响较大,主要体现在恶劣天气能见度较低的情况下,在这些特殊天气状况下利用偏振成像技术进行FOD的识别就有相当的优势,偏振成像技术相比于光强成像在低对比度目标探测领域具有显著优势,同时偏振成像具有穿云透雾成像的特点,在扬尘雾霾天气中也可以工作,能够极大提高机场跑道异物检测系统环境适应性与探测能力[7]。而一般的光强成像技术只能从光强、光谱和空间三个维度来获得成像信息,由于光在传播的过程中,会受到对比度高低、大气雾霾等干扰物质的散射和反射影响,使成像系统获得的图像变得模糊,目标物的识别变得非常困难[8]。
基于偏振成像的机场跑道异物检测系统具体涉及两个分系统,一个为分时偏振成像系统,一个为偏振图像异物检测提取系统。分时偏振成像系统涉及高速旋转偏振轮与科学级相机同步触发控制技术,科学级相机图像数据采集技术;偏振图像异物检测提取系统涉及偏振度图像计算生成技术,偏振图像的异物检测与识别技术。系统结构示意图见图1。
3.2 系统原理
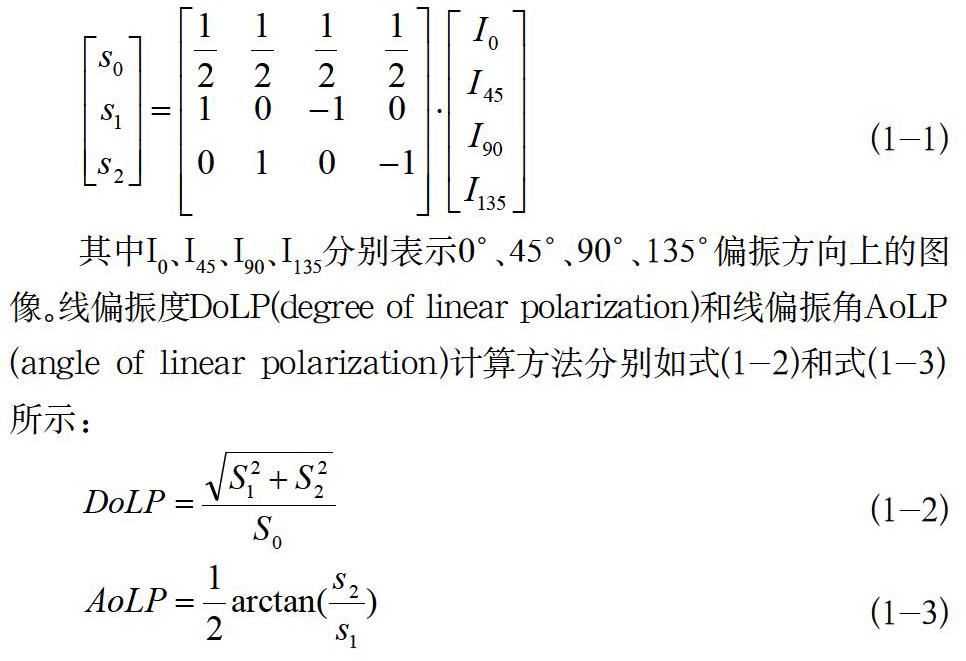
偏振成像探测终端采用分时线偏振成像方式,Stoke矢量的前三项就可以表示线偏振成像信息,所以得到线偏振方向上的图像就是得到目标的线偏振信息。至少需要三个分时偏振成像通道,在本系统中,采用四个分时偏振片(0°,45°,90°,135°)的快速切换分时偏振成像方式,采用四个偏振片末端成像光路的光束会聚角小,光束会聚导致的偏振测量偏差很小,因此偏振片可直接放置于末端成像光路中。线偏振成像系统的偏振成像公式见(1-1)。
其中I0、I45、I90、I135分别表示0°、45°、90°、135°偏振方向上的图像。线偏振度DoLP(degree of linear polarization)和线偏振角AoLP (angle of linear polarization)计算方法分别如式(1-2)和式(1-3)所示:
偏振成像系统开始工作时,偏振片转轮控制器输出外触发信号,触发信号的上升沿触发偏振片转轮开始转动,当切换完成后外触发信号转换为低电平,外触发控制板卡在检测到电平下降沿时产生外触发信号触发相机采集图像。相機接收到触发信号后进行偏振图像的采集,并及时向PC机输出偏振片旋转四个位置时的光强图像,通过四个光强图像的计算得到标记异物信息的偏振度图像,这样通过软件自动探测异物并给出报警信息。
4 实验结果与分析
实验结果见图2、图3。各图都是机场跑道的偏振度图像和光强图像(0°,45°,90°,135°),图2为有异物时机场跑道偏振度图像和光强图像。从图可以看出,有异物在机场跑道时,系统右侧字体提示检测到异物!同时将异物的位置标注在偏振度图像上,显示方框。图3为有异物且对比度降低的情况,左侧矩形框显示检测到异物的位置信息。
5 结语
利用偏振光学技术作为机场跑道异物探测识别是一个新思路,偏振成像能有效提高光电成像装置的探测识别能力,提高目标对比度,减少杂散光干扰,具有“弱光强化,强光弱化”的特点,将偏振成像技术应用于机场跑道低对比度异物检测领域,就是利用了偏振成像的这些显著优势。同时偏振成像具有穿云透雾成像的特点,在扬尘雾霾天气中也可以工作,能够极大提高机场跑道异物检测系统环境适应性与探测能力。
参考文献
[1]李煜.机场跑道异物检测识别算法与系统设计研究[D].上海交通大学,2012.
[2]黄晨,王建军,薛莉,钟云鹏.靶场偏振成像技术应用[J].飞行器测控学报,2016,35(04):264-269.
[3]成威.机场跑道异物检测系统算法研究与软件实现[D].北京交通大学,2014.
[4]周扬.基于视频的机场跑道异物检测算法研究[D].南京航空航天大学,2014.
[5]何云骥.毫米波雷达FOD检测技术研究[D].北京理工大学,2014.
[6]李平伟.毫米波雷达用于机场跑道FOD检测的现状与展望[J].微波学报,2012,(S1):264-266.
[7]王会峰,张佳佳,赵祥模,魏飞婷,汪贵平.成像偏振在车道线检测与识别中的应用[J].西南交通大学学报,2019,1-6.
[8]周凯.基于道路监控视频的雾霾能见度检测方法研究[D].南京邮电大学,2017.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
中老年保健(2021年9期)2021-08-24
小雪花·成长指南(2021年6期)2021-08-18
昆明医科大学学报(2020年12期)2021-01-26
装备制造技术(2020年4期)2020-12-25
兽医导刊(2019年1期)2019-02-21
电子科技大学学报(社科版)(2015年2期)2015-07-18
电子设计工程(2015年3期)2015-02-27
河南科技(2014年24期)2014-02-27
中国工程咨询(2011年2期)2011-02-13
