面向训练阶段的神经网络性能分析
2018-10-12 02:19李景军
计算机与生活 2018年10期
李景军,张 宸,曹 强
华中科技大学 武汉光电国家研究中心,武汉 430074
1 引言
随着深度学习技术的发展,卷积神经网络(convolutional neural network,CNN)被广泛应用到人脸识别、物体检测等领域。另外,处理器计算能力的增强,不仅缩短了模型训练的时间,而且也使得CNN技术得到了进一步的研究和开发。例如,Google公司开发的FaceNet网络模型人脸识别精度可以达到99.63%[1]。微软开发的Optasia,在大城市交通摄像机的关联查询方面,也表现出很高的精度和性能[2]。
虽然CNN取得了很高的精度,但是复杂的网络模型给处理器带来了极大的挑战。例如,为了达到57.1%的top-1精度和80.2%的top-5精度,AlexNet[3]需要迭代358000次[4]。VGG-16[5]拥有13800万个权值参数,一次迭代需要155亿次浮点操作[6]。对于大型网络模型(例如ResNet[7]),常常由几十或者几百层组成,模型具有更多的参数,迭代计算需要更多的浮点操作。由于CPU采用复杂的控制逻辑和分支预测,利用CPU训练大型神经网络模型时间很长,完成一次训练往往需要几天甚至十几天。
为了加速训练过程,FPGA、GPU和一些专用加速器[8-13]被相继开发,通过优化并行计算、流水线或近数据处理等方式,加快神经网络的执行速度。GPU具有强大的并行处理能力,因此深度学习工作者大多使用GPU训练神经网络模型。Song等人[14]通过对任务进行分类,动态调度GPU的内部资源,在mobile GPU上实现了不同任务在延时、能耗和精度方面的权衡。Rhu等人[15]同时利用显存和内存存储特征图和参数,实现了GPU训练更大的网络模型。此外,cuDNN[16]、cuBLAS[17]等GPU加速库和一些并行算法的出现,从算法上优化了矩阵乘法,缩短了矩阵运算的时间。
利用GPU神经网络训练速度得到了很大的提升,但是GPU的计算资源和显存仍然未被充分利用[18]。训练复杂的网络模型时,如何高效地利用GPU,仍然有待进一步研究。与之前的工作相比,本文注重于探究和分析在训练CNN过程中GPU资源是否被充分利用,以及GPU的计算效率是否达到最高。量化了GPU加速库、神经网络模型和批次对GPU计算效率和资源利用率的影响。另外,统计了神经网络训练过程中每层的参数和特征图的显存占用量,为后续利用GPU训练大规模网络模型的研究铺平道路。
总之,本文的主要贡献如下:
(1)把神经网络的训练过程分解为6个阶段,通过细粒度的实验,给出了每个阶段的延时,明确地指出图像预处理和反向传播的矩阵乘法是最耗时的操作。
(2)对比了cuDNN和cuBLAS库加速CNN训练的差异。卷积层cuDNN的计算效率和资源利用率分别是cuBLAS的2倍和1.7倍,但是在全连接层两者差距不大。
(3)探究了网络模型和批次对GPU计算效率和资源利用率的影响。对于不同网络模型,卷积层的计算效率和资源利用率都远远高于全连接层。另外,较大的批次虽然会带来计算效率的提升,但是资源利用率不会升高。
(4)统计了不同网络模型每层的显存使用情况,为以后研究训练超出GPU显存的网络模型奠定基础。
本文组织结构如下:第2章简述相关工作;第3章介绍CNN的背景、数据流以及实验方法;第4章针对CNN数据流,对每个阶段进行细粒度的量化分析;第5章展示并分析实验结果;第6章总结全文。
2 相关工作
先前大部分工作研究和设计了神经网络加速器,从硬件来加速网络训练过程[19-23]。本文重点从数据流的角度阐述神经网络训练过程,并量化了训练过程中GPU的计算效率和资源利用率,为之后GPU或者神经网络加速器的研究奠定基础。
神经网络的计算非常耗时,因此有大量的工作对此优化[24-26],但是图像预处理耗时也比较长,需要进一步优化。尽管使用快速存储设备可以分摊这一开销,但预处理的问题并没有得到解决。随着计算能力的提升,图像预处理会拖慢神经网络的训练。
另外,还有一些探究网络模型性能的工作。Shi等人[27]在不同的硬件平台上对多种网络模型进行了评估。通过比较各种模型的运行时间,衡量网络模型对硬件平台的敏感程度。虽然本文也是通过时间延时衡量性能,但是主要在单个GPU平台,评估GPU计算效率和资源利用率,分析不同网络模型性能差异的根本原因。Li等人[28]对比了cuda-convnet和cuDNN下网络模型的吞吐量,然后针对内存布局重点讨论了矩阵乘法带来的吞吐量差异。从块和寄存器分配等角度探究GPU资源利用情况,更注重于充分开发GPU的计算潜力。
3 背景
本章首先对CNN进行简要介绍,阐述CNN数据流的每个步骤,然后针对训练网络模型的过程设计实验方法。
3.1 CNN简介
常见的卷积神经网络主要由3种类型的层组成:卷积层(conv)、池化层(pool)和全连接层(fc)。为了防止过拟合,提高网络的准确率,研究人员会添加额外的层(norm、dropout等)。CNN就是由这些层按照一定顺序组合而成,网络的模型参数和权值都保存在这些层中。图1展示了一个简单的CNN网络模型。

Fig.1 Convolutional neural network图1 卷积神经网络
卷积层,卷积层是利用一系列卷积核与输入数据进行卷积操作。在NCHW内存布局中,卷积计算如式(1)所示:

其中,K是卷积核;X和Y分别是卷积层的输入和输出;Ni是批次大小;Ci和Co分别是输入和输出通道数;Hi和Wi分别是输入特征图的高和宽;KH和KW代表卷积核的大小。总之,卷积层通过卷积核从输入的特征图中提取各种局部特征,比如边、角等。
池化层,也叫下采样层,普遍的实现方式有两种:最大池化和均值池化。最大池化是对邻域内的特征点求最大值,均值池化是对邻域内的特征点求平均值。以均值池化为例,计算如式(2)所示:

池化层对卷积层提取的局部特征进行下采样,抽象为低分辨率的特征图。
全连接层,又叫作内积层。全连接层将之前层学到的特征图映射到样本空间。全连接层可以看作卷积核为KH=1,KW=1的卷积层。其中,H和W分别为上一层结果的高度和宽度。
Softmax层,一般在网络模型的最后,用来计算分类对象的概率。它的输入来自全连接层。Softmax层的计算如式(3)所示:

其中,Xk是上层输出的最大预测值。
3.2 前向传播和反向传播
训练神经网络是学习神经网络权值参数W的过程,该过程需要进行多次迭代(比如AlexNet迭代450000次),每次迭代又可以细分为前向传播(Forward)和反向传播(Backward),如图2所示。

Fig.2 Forward and backward propagation of CNN图2 卷积神经网络的前向和反向传播
在前向传播中,CNN网络模型中的层按照从前至后顺序依次执行,第L层的输出是第L+1层的输入。在前向传播的末尾,一个损失函数J被定义,用于衡量网络模型输出的预测结果Yi与真实标签Ti的差异,得到推断误差,如式(4)所示:

在反向传播过程中,利用链式法则和随机梯度下降算法[29-31],由后至前计算权值梯度ΔW。计算如式(5)、式(6)所示:

最后,使用权值的梯度ΔW更新每层对应的权值:

3.3 CNN数据流
图3展示了一个典型的CNN数据流。对于训练阶段,神经网络的迭代过程可以细分为6个阶段:

Fig.3 Data flow of CNN in computer systems图3 计算系统的CNN数据流
数据预取①:首先,预取线程从存储设备(比如硬盘、SSD)读取图像数据和对应的标签到内存。为了提高图像读取速度,图像数据可以以数据库(LMDB、LevelDB)或者HDF5格式保存在存储设备。
图像预处理②:对图像进行均值消减、裁剪、缩放等操作,变换到网络规定的输入大小(AlexNet网络模型是3×227×227)。
数据拷贝③:将批次大小张图像数据从内存异步拷贝到显存,供GPU计算使用。
网络计算④:从显存中读取图像数据、权值等,执行每层的计算(包括前向传播和反向传播),并在反向传播过程中计算每层的权值梯度ΔW。
权值更新⑤:利用权值梯度ΔW,通过W=W+ΔW更新显存中的权值,并准备下次迭代,迭代直至训练结束。
模型保存⑥:在训练过程中,为了避免进程异常或者系统崩溃丢失训练的网络模型,常常需要使用快照技术在一定数量的迭代次数后(例如10000次),将网络模型保存到存储设备。
3.4 方法评估
本文的目的是探索神经网络训练阶段GPU的计算效率和资源利用率,并分析影响GPU性能的根本原因。使用延时时间作为评价性能的指标。首先对神经网络的一次迭代过程进行量化分析,从数据流的角度详细地给出迭代中各个阶段的执行时间。然后,从GPU加速库、网络模型和批次三方面讨论对GPU计算效率和资源利用率的影响。最后统计了网络模型中每层的权值数据和特征图对显存的使用情况。Caffe[32-33]提供了一个开发友好的平台,并且在训练神经网络方面展现出了良好的性能,因此选用Caffe作为本文的实验平台。
硬件和软件平台:表1详细地展示了实验中使用的CPU和GPU的规格信息。本文使用的软件平台如表2所示。cuDNN是专为神经网络设计的GPU加速库,对卷积层、池化层、正则化层和激活层进行大量优化。与cuDNN不同,cuBLAS是针对GPU设计的线性代数运算库,能够利用GPU加速计算密集型操作。

Table 1 Hardware configurations表1 硬件配置

Table 2 Software configurations表2 软件配置
网络模型和负载:在实验中,本文选择MNIST[34]和ImageNet[35]数据集作为不同网络模型的负载。Ima-geNet数据集作为AlexNet[3]网络和VGG-16[5]网络的输入,MNIST数据集作为LeNet[36]网络的输入。ImageNet(240 GB,LMDB)包含128万张训练图像和50000张测试图像,是一个用于训练视觉类网络模型的典型大数据集。数据集中每一张图像都用从0到999范围内的一个数字标记,每一个数字代表自然界中一个具体的物种。另一方面,MNIST(59 MB,LMDB)数据集通常用于手写数字的分类,有60000张训练图像和10000张测试图像。MNIST中的所有图像都是28×28像素的灰度图,每张图像用0到9中的一个数字标记,每一个数字代表一种手写数字。
4 数据流分析
首先从数据流的角度,量化地给出一次迭代中各个阶段的执行时间,包括数据预取、图像预处理、数据拷贝、网络计算和权值更新。然后针对网络计算阶段,统计每层的执行时间,并根据每层主要函数的执行时间,分析网络计算的瓶颈。
图4列出了在磁盘阵列(4×HDD,RAID 0)和单个硬盘上训练AlexNet网络模型,批次为256时各阶段的执行时间和一次迭代总时间。其中权值更新耗时较短,图像预处理(transform)和网络计算(forward和backward)耗时较长,数据预取时间与存储设备有关。

Fig.4 Alexnets per stage computation latency over disk array and HDD图4 Alexnet磁盘阵列和硬盘上各个阶段计算延迟
图像预处理:依次从内存中读取256张图像,对每张图像进行均值消减、剪裁、缩放等操作。由于数据集有限,网络模型需要迭代几十万次,为了防止之后的迭代过程使用与本次迭代相同的图像数据作为输入,图像预处理引入了随机函数,在一定程度上随机控制图像转换操作,防止过拟合。图像转换操作虽然简单,但是要对每个像素进行操作,CPU处理256张图像转换需要大约110 ms。
数据拷贝:转换后的图像数据仍然保存在内存中,实验中,150 MB数据从内存拷贝到显存需要13 ms。如果每次迭代前都需要串行地执行数据预取、图像预处理和数据拷贝,GPU大部分时间空闲。因此如图3所示,使用单独的预取线程进行数据预取,同时数据拷贝以异步的方式执行,这样不仅可以高效利用内存带宽,而且分摊了数据预取阶段的时间花销。
网络计算:网络计算阶段耗时223 ms,其中,前向传播和反向传播分别占40%和60%。
另外对于磁盘阵列,迭代时间主要取决于网络计算(computation)的时间。而对于单个磁盘,数据读取时间是磁盘阵列的5.4倍,较慢的读取速度,大大增加了预取时间。数据层需要等待预取线程的图像数据,因此迭代时间决定于数据预取的时间。磁盘阵列的读取速度能够满足网络计算的需求,因此接下来重点分析网络计算阶段。
为了进一步细粒度探究网络计算阶段的真实执行情况,使用Nvidia Visual Profiler统计AlexNet网络模型一次迭代中每层的函数执行情况,并按照延时时间从大到小排序,表3展示了延时最高的15个函数。在所有耗时较高的函数中,卷积层的矩阵乘法运算占87%,尤其是前两个卷积层反向传播中矩阵乘法运算(bconv1和bconv2),占整个迭代时间的50%。因此,细粒度地分析卷积层矩阵操作的延时,量化评估GPU的计算效率和资源利用情况,揭示影响GPU性能的根本原因,显得格外重要。此外,池化层和全连接层反向传播中的延时也不容忽视。
以AlexNet网络模型为例,量化地给出了每一层计算操作的时间,为之后的实验分析提供了基础。
5 实验分析
针对网络计算阶段,首先对比AlexNet网络在不同GPU加速库下的GPU计算效率和资源利用率。然后细粒度地分析在大型、中型和小型网络模型下GPU的性能差异。此外,还量化地揭示了在训练网络模型过程中,每层的特征图和权值数据的显存占用情况。

Table 3 Top-15 latency of major functions in layers表3 层中主要函数时间延时的前15名
5.1 cuDNN与cuBLAS的对比分析
统计了在cuDNN和cuBLAS上训练神经网络模型的计算延时,包括前向传播、反向传播和梯度更新,如图5所示。cuBLAS库的前向传播和反向传播过程比cuDNN慢了65%。由于权值更新阶段的时间延时不超过4.4%,省略这部分的分析。

Fig.5 Latency for computation phase over cuDNN and cuBLAS图5 cuDNN和cuBLAS在计算阶段的延时
图6展示了cuDNN和cuBLAS库每层执行时间对比(前向传播和反向传播)。从图中可以看出,在相同的存储设备和预取延时条件下,cuDNN计算更快,尤其是conv层和norm层,cuBLAS的平均延时分别是cuDNN的4倍和3.25倍。从整体来看,norm层、relu层和pool层耗时较短,重点分析conv层。

Fig.6 Per layer computation latency over cuDNN and cuBLAS图6 cuDNN和cuBLAS每层的延时
为了深入地探究cuDNN和cuBLAS的计算效率,量化分析计算性能,用实际吞吐量与峰值吞吐量的比值衡量GPU的计算效率:

其中,flops是卷积层单精度浮点计算次数;t是卷积层的执行时间;Cores是GPU的CUDA核数量。
图7展示了本文的实验结果,卷积层cuDNN的计算效率远高于cuBLAS,是cuBLAS的2倍。虽然cuBLAS在全连接层的计算效率较高,但是与cuDNN差别不大。前面提到,卷积层cuBLAS的总延时是cuDNN的4倍,但卷积层的计算效率仅仅为cuDNN的一半,这是因为卷积层cuBLAS每次处理一张图像,循环执行256次(批次256)。cuDNN一次处理256张图像,减少了CUDA函数调用次数。另外,处理过程中的一些异步操作(im2col[16])也会在一定程度上减少耗时。

Fig.7 Per layer compute efficiency over cuDNNandcuBLAS图7 cuDNN和cuBLAS每层的计算效率
表4列出了卷积层和全连接层网络计算过程中的矩阵信息。可以看出,对于相同大小的结果矩阵,cuDNN和cuBLAS实际执行的子矩阵大小也有很大差别。这一方面是由硬件条件决定的(例如显存大小、寄存器数量等),另一方面也与GPU内部块和线程的划分有关。
为了进一步探究GPU内部计算资源的利用情况,探究GPU计算效率低的原因,定义矩阵乘法计算过程中实际划分的线程块的数量:

Table 4 Detail information of CNN dominated kernels表4 CNN主要核函数的详细信息

其中,M×N是结果矩阵的大小;m×n是CUDA划分后实际执行的子矩阵的大小,这样结果矩阵就可以通过执行若干个子矩阵操作计算。
由于GPU寄存器资源有限,而矩阵乘法是寄存器密集型的操作,每个线程至少使用81个寄存器,因此从寄存器利用的角度衡量最大可用的线程块数:

如果Gridsize小于maxBlocks,则说明GPU资源未充分利用。如果Gridsize大于maxBlocks,则GPU资源也存在利用率不高的情形,为了量化GPU资源利用率,使用RU衡量GPU的资源利用效率:
其中,cycles是GPU执行完所有Gridsize需要的时钟周期。在反向传播过程中,既有权值梯度的计算,又有梯度映射的计算。表3中显示,对于大多数层,权值梯度ΔW的计算延时高于梯度映射ΔY的计算延时。尽管conv2层梯度映射延时较高,但是与权值梯度延时差距不大。因此,重点分析反向传播中权值梯度的计算过程。图8展示了本文的实验结果。

Fig.8 Resource utilization of main layers over cuDNN and cuBLAS图8 cuDNN和cuBLAS在关键层的资源利用率
对于cuDNN,卷积层的资源利用率最高,基本都在95%以上,全连接层在80%左右。而对于cuBLAS,卷积层的资源利用率平均只有47%,全连接层的资源利用率达到最高。这是因为卷积层cuBLAS每次处理一张图像,数据量较少,实际分配的Gridsize要小于maxBlocks,导致GPU的计算资源并没有充分利用。而cuDNN是将256张图像的处理过程融合成一次大矩阵操作,训练过程较大的批次,使得结果矩阵很大,从而Gridsize远大于maxBlocks,实现了较高的资源利用率和计算效率。另外对于全连接层,cuDNN和cuBLAS都是将一批图像的计算看作一次矩阵操作,因此两者的资源利用率相近。
bfc6层cuBLAS资源利用率远高于cuDNN,是因为cuBLAS使用了较大的blocksize,一定程度上使得Gridsize大于maxBlocks。
总之,由于cuDNN和cuBLAS矩阵操作方面处理方式的不同,使得它们在计算效率和资源利用率上差异很大。在训练神经网络模型时,由于较大的批次和数据量,使得cuDNN的性能要高于cuBLAS。因此,根据网络模型结果矩阵的大小,合理地分配设置子矩阵大小、块大小和线程数,会增加GPU的计算效率和资源利用率,加快训练过程。
5.2 网络模型
不同网络模型使用的卷积核和图像大小不同,间接地导致GPU资源分配不均匀,从而影响训练性能。因此,在不同模型下,对比了GPU的计算效率和资源利用率。图9、图10分别展示了3种网络模型LeNet、AlexNet和VGG-16的GPU计算效率和资源利用率。
首先无论是大型、中型还是小型网络模型,卷积层的计算效率都高于全连接层,是全连接层的1.94倍。这是因为卷积层的矩阵大小远远大于全连接层,GPU计算效率更高。另外VGG-16中卷积层矩阵更大,计算效率最高,其次是AlexNet和LeNet。而全连接层的计算效率AlexNet最高,其次是VGG-16和LeNet。由于较小的网络模型和简单的计算操作,LeNet的卷积层和全连接层的计算效率都不高。

Fig.9 Compute efficiency of GPU in main layers overAlexNet,LeNet and VGG-16图9 AlexNet、LeNet和VGG-16在关键层GPU的计算效率

Fig.10 Resource utilization of main layers overAlexNet,LeNet and VGG-16图10 AlexNet、LeNet和VGG-16在关键层的资源利用率
从资源利用率角度看,较大的矩阵规模和复杂的矩阵运算使VGG-16和AlexNet在卷积层的资源利用率几乎达到了100%。AlexNet网络在全连接层的资源利用率达到了80%,VGG-16和LeNet都低于50%。这是因为AlexNet的全连接层分配了较大的blocksize和r,较小的maxBlocks使得Gridsize是max-Blocks的1.5倍。而LeNet和VGG-16网络模型,实际分配的Gridsize不到maxBlocks的一半,导致了极低的资源利用率。
VGG-16的全连接层反向传播(bfc6、bfc7和bfc8)的资源利用率远高于前向传播(fc6、fc7和fc8)。由5.1节的分析可知,对于大部分卷积层和全连接层,反向传播计算参数梯度的时间长于计算输入的梯度,因此,主要讨论参数梯度计算阶段的资源利用情况。VGG-16的全连接层在参数梯度计算中拥有比输入梯度计算更大的batchsize和r,另外VGG-16复杂的网络模型和较多的参数,也进一步加大了Gridsize和maxBlocks之间的差值,增大了资源利用率。
总之,通过图9和图10,卷积层的资源利用率和计算效率较高,并且相比于小型网络(LeNet),中型网络(AlexNet)和大型网络(VGG-16)的计算效率达到了70%。全连接层的资源利用率和计算效率普遍较低,对于全连接层较多的网络,增大全连接层的计算效率显得格外重要。
5.3 批次大小
通过5.1节和5.2节可知,分配的blocksize大小、寄存器的数量以及使用的Gridsize大小会对计算效率和资源利用率产生很大影响。前面已经量化地讨论了GPU加速库和网络模型带来的性能差异。但是训练阶段批次大小也会影响结果矩阵的大小,进而通过Gridsize影响计算效率和资源利用率。
图11和图12分别给出了AlexNet网络模型在批次为128、256和512时的计算效率和资源利用率。可以看出,批次越大计算效率越高。批次为512的计算效率比256和128分别高出11%和41%。因此,适当增加批次会增加GPU的计算效率。

Fig.11 Compute efficiency of main layers over different batchsizes图11 不同批次下关键层的计算效率

Fig.12 Resource utilization of main layers over different batchsizes图12 不同批次下关键层的资源利用率
从资源利用率角度看,不同批次并没有太大差别且都大于80%。这是因为在前向传播中,尽管批次的差异会造成Gridsize差别很大(与批次大小成正比),但是不同批次的blocksize和r完全相同,因此资源利用率基本相同。fc8层512批次的GPU资源利用率较高的原因是完成所有Gridsize需要的时钟周期cycles不严格地与Gridsize成正比。另外,在反向传播中没有出现这种现象,这是因为在反向传播中参数梯度的计算,参数的数量不会随着批次改变。总之,计算效率会在一定程度上随着批次的增大而提高,但是批次对资源利用率的影响极小,基本可以忽略。因此计算效率和资源利用率并不是严格正相关。
5.4 显存利用
图13展示了不同网络模型的显存占用情况。可以看出,随着人们对模型计算精度需求的提升,网络模型不断增大,显存使用越来越大。在当前的框架中,为了提升网络的训练过程速度,所有的数据包括权值、特征图和预取图像都存放在显存,通过这种方式减少GPU对内存的访问,减低内存与显存数据拷贝的时间开销。但是当网络模型所需显存大于显存的最大容量时,模型的训练过程将无法执行。另外,尽管总的显存使用量很高,但是层级的显存利用率不到20%。在分析GPU计算效率和资源利用率的同时,很有必要关注并量化地分析训练过程中显存的使用情况。

Fig.13 GPU memory allocation size and max layer-wise usage图13 不同模型的显存分配和层级的最大显存使用
为了探究不同网络模型下显存的使用情况,量化显存利用率,对LeNet、AlexNet和VGG网络每层的显存占用情况进行了详细的分析,结果如图14~图16所示。

Fig.14 GPU memory allocation size of each layer inAlexNet(512)图14 AlexNet(512)网络每层显存占用情况
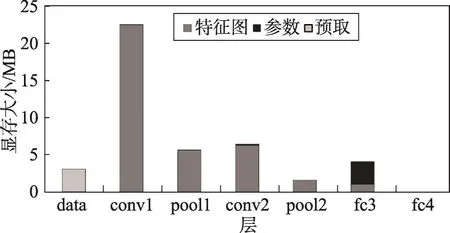
Fig.15 GPU memory allocation size of each layer in LeNet(256)图15 LeNet(256)网络每层显存占用情况

Fig.16 GPU memory allocation size of each layer in VGG-16(64)图16 VGG-16(64)网络每层显存占用情况
前两个卷积层和第一个全连接层显存占用较高,因为前两个卷积层使用大量卷积核在原始图像上进行特征提取(比如AlexNet的conv1层有96个卷积核),生成大量特征图。全连接层将特征图映射到样本空间,参数数据量远大于特征图量。Relu层和drop层没有显存分配,因为这些层在卷积层上进行原地更新。
虽然训练阶段显存占用量很大,但是每层的显存占用较低,因此根据每层的数据量对显存进行合理的分配将会提高GPU训练大型网络的能力。
6 总结
本文针对神经网络的训练阶段进行了细粒度的分析,量化地给出了数据预取、数据拷贝、网络计算等阶段的时间延时以及每层的时间延时。对于网络计算阶段,探讨了GPU加速库、网络模型和批次对GPU计算效率和资源利用率的影响。另外,给出了不同网络模型每层的参数、特征图等的显存占用量,指出了通过调度每层显存分配能实现训练大规模神经网络。
猜你喜欢
矿山安全信息(2022年11期)2022-11-26
现代电力(2022年2期)2022-05-23
矿山安全信息(2021年3期)2021-11-30
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年13期)2020-01-14
电子制作(2019年19期)2019-11-23
电子制作(2019年11期)2019-07-04
中学生数理化(高中版.高考理化)(2019年6期)2019-06-22
电子制作(2019年24期)2019-02-23
北京航空航天大学学报(2018年1期)2018-04-20