
输入与速度饱和的异构多智能体系统的一致性
2018-10-16 03:14刘辰辰尹燕燕
计算机应用 2018年8期
刘辰辰,尹燕燕,2,刘 飞
(1.江南大学 自动化研究所,江苏 无锡 214122; 2.科廷大学 工程学院, 澳大利亚 西澳大利亚州 珀斯市 WA6845)(*通信作者电子邮箱yanyan.yin@curtin.edu.au)
0 引言
近些年,多智能体的协同控制已经取得了突破性的进展, 并在工程中得到了广泛应用,例如,无人潜航器、 智能电网、传感器网络和编队控制[1-4]。多智能体系统的协同控制的一个基本问题是一致性控制,即利用智能体之间的信息交换设计一个分布式控制器,使得每个智能体最终达到一个共同的输出或者状态。
本文研究的是由一阶和二阶智能体组成的异构多智能体系统,并已经有众多学者进行了相关的研究[5-8]:文献[5]研究了由一阶和二阶智能体组成的混合阶多智能体系统中二阶智能体速度(二阶状态)不可测的一致性问题,针对速度不可测的情况,在分布式控制器中构建了一个辅助方程,实现了混合阶多智能体系统的一致性;文献[6]的研究将一阶和二阶组成的混合阶智能体系统分成了两个集群,通过构建的分布式控制器使两个集群的位置(一阶状态)分别实现了不同的一致性目标, 而速度(二阶状态)最终收敛到零;文献[7]给出了固定拓扑和切换拓扑下的异构多智能体一致性的充分条件;文献[8]则研究了当异构多智能体系统具有随机通信时延时的一致性控制问题。
系统执行器故障在实际应用中是普遍存在的现象:文献[9]研究的非线性特性是指执行器的死区特性,采用在线估计的方法得到逆模型,并以此来抵消执行器的非线性特征;文献[10]研究了多智能体系统的执行器输入具有非线性特性和执行器存在故障的情况,应用模糊逻辑系统逼近系统的未知非线性函数,同时设计了执行器的故障估计器。执行器的输入饱和是本文研究的另一个问题,也是实际应用中普遍存在的现象[11-13]。在执行器输入饱和情况下,一致性问题近来引起了许多研究者的关注,并且已经取得了一些理论结果:文献[14]研究了线性多智能体系统的输入饱和问题,将低增益理论[11-13]应用于线性多智能体系统,通过求解Riccati方程得到低增益参数构建了一组线性状态反馈分布式控制律,实现了半全局的领导-跟随一致性;文献[15]考虑了线性多智能体系统执行器的速率和位置的饱和问题,求解Riccati方程得到低增益参数构建了分布式控器, 使得执行器存在位置和速率饱和的线性多智能体系统实现了半全局一致性;文献[16]研究了多智能体系统的执行器具有饱和及死区特性的情况,同时,还考虑了系统输入的未知扰动,利用低和高的反馈增益构建了一个新的分布式控器,实现了具有执行器缺陷的线性多智能体系统半全局-领导者跟随一致性。
在实际应用中,不仅存在智能体输入饱和的情况, 还存在智能体的速度(二阶状态)也饱和的情况,在以上文献的基础上,本文研究考虑了同时具有执行器输入饱和与速度饱和的混合阶多智能体系统半全局一致性问题。一方面,以往文献在处理执行器的输入饱和问题时,往往通过一个趋于零的增益将系统的输入量控制在饱和的边界以下,从而避免饱和的出现,但这样的增益范围较小,而且在实际应用中趋于零的增益很难实现;另一方面,现有文献中有关二阶系统速度饱和问题的研究较少。鉴于此,本文同时考虑了混合阶多智能体系统的输入饱和与速度饱和问题,分别构建了无领航者和有领航者的分布式控制器。在控制器输入量无需避免饱和函数上下界的前提下,只针对二阶多智能体系统的通信环节增加了增益参数,并用Lyapunov稳定性理论求出了增益的取值范围。相比以往的处理方法,本文研究简化了计算,增大了增益的取值范围,从而能缩短多智能体系统一致性的收敛时间;同时,本文还考虑了智能体通信权重小于1时的一致性问题,只要多智能体系统的通信拓扑图是无向且连通的,根据文中得到的控制器能够保证混合阶多智能体系统最终达到一致。
1 问题描述
具有输入饱和与速度饱和的混合阶多智能体系统可以定义如下:
(1)
其中:ζi∈R,ηi∈R分别是第i个智能体的位置和速度;μi∈R是第i个智能体的输入;ϑu、ϑv则分别为第i个智能体的输入与速度饱和函数。对这个混合阶多智能体系统,作出以下假设:
假设1 所有智能体的初始位置ζi和初始速度ηi是有界的,即给定一个包含零点的有界集合χ∈R和γ∈R,使得ζi(0)∈χ(i∈In)和ηi(0)∈γ(i∈Im)。
假设2 混合阶多智能体系统的通信拓扑图是无向且连通的。
定义1[17]饱和函数ϑ(s)可以用式(2)表示:
ϑ(s)=sgn(s)inf(|s|,Δ)
(2)
其中,Δ>0是ϑ(s)的最大值。由文献[15]可以得到以下不等式成立:ϑv(s2)·ϑu(s1-ks2)≤ϑv(s2)·ϑu(s1),且ϑ(ks)s≥0,其中k是一个正定常数。
定义2 本文研究的半全局一致性问题描述如下:考虑一组具有输入饱和与速度饱和的混合阶多智能体系统, 它包括m个二阶智能体和n-m个一阶智能体,在假设1和假设2成立的前提下,通过分布式控制器(μi,i∈In)的控制,所有智能体的位置和速度最终达到一致。 即,当智能体的初始位置(ζi(0)∈χ,i=1,2,…,n)和初始速度(ηi(0)∈γ,i=1,2,…,m)有界,在t→∞,多智能体系统无领航者时,所有智能体的位置误差和速度最终收敛到零;
多智能体系统有领航者时,所有智能体的位置与领航者的位置误差和速度最终收敛到零。
1)V(x)→∞(‖x‖→∞);


2 分布式一致性控制
2.1 无领航者一致性控制
本节考虑了无领航者的混合阶多智能体系统,基于智能体之间的信息交换以及智能体自身的状态,构建了分布式控制器(3)。
(3)
其中:A=[aij]∈RN×N是通信拓扑图的连接矩阵,如果智能体vi和vj之间存在信息交换,那么aij>0,否则aij=0。不失一般性,aii=0(i=1,2,…,N)。

定理1 考虑一组具有执行器输入饱和与速度饱和的混合阶多智能体系统,在多智能体的输入值大于饱和函数上下界时,假定假设1和假设2成立,在控制器(3)的控制作用下,混合阶多智能体系统(1)可以达到一致。
下面通过Lyapunov稳定性理论和Lasalle不变集原理分析了此系统在控制器(3)的控制作用下的稳定性,并依此计算通信增益参数k1选取范围。
式(1)可以改写为以下形式:
(4)
选择如下Lyapunov函数[9]:
对于任意的ζi≠ζj(i,j∈In)或ηi≠0(i∈Im),V1(ζ,η)是正定的。 因为χ和γ的有界性,因此下列不等式是成立的:
其中,h是一个正定常数。定义ΛV(h):={(ζ,η)∈Rn:V1(ζ,η)≤h},对V1(ζ,η)沿着式(4)求时间的导数,可得:
因为通信拓扑图GN是无向且连通的,所以由假设2可得aij=aji,由此可得:
以及
因此,V1(ζ,η)的导数可写为如下形式:
由定义1,可得:
因此,
首先,对i∈In,考虑|k1Γi|≤Δu时,可得:
接下来,运用Lasalle不变集原理。

进一步得到:
由以上性质及系统的通信拓扑图的对称性可得:
所以,M可以表示为:
因此,对∀(ζ,η)∈ΛV(h)
2.2 有领航者一致性控制
本节考虑了有领航者的混合阶多智能体系统,基于智能体之间的信息交换以及智能体自身的状态,构建了分布式控制器(5)。
ui=
(5)

定理2 考虑一组具有执行器输入饱和与速度饱和的混合阶多智能体系统,在多智能体的输入值大于饱和函数上下界时,假定假设1和假设2成立,在控制器(4)的控制作用下,混合阶多智能体系统(1)可以达到领航跟随一致。
下面,通过Lyapunov稳定性理论和Lasalle不变集原理分析了此系统在控制器(5)的控制作用下的稳定性,并依此计算通信增益参数k2选取范围。
定义ei=ζi-ζ0,式(1)可以改写为以下形式:
(6)
选择如下Lyapunov函数:
对于任意的ei≠ej(i,j∈In)或ηi≠0(i∈Im),V2(e,η)是正定的。因为χ和γ的有界性,因此下列不等式是成立的。
其中,h是一个正定常数。定义ΛV(d):={(e,η)∈Rn:V2(e,η)≤d},对V2(e,η)沿着式(6)求时间的导数,可得:
进一步,对i∈In,考虑当|k2Xi|>Δu时,有
令ϖ=max(Xi)(i∈In),可得:
同样的,运用Lasalle不变集原理,可以得到S的最大不变集M为:
这表明在只需要计算一个增益取值范围且有领航者的情况下,对∀(ζ,η)∈ΛV(h)
3 仿真分析
本章对所提出的异构多智能体系统的一致性算法(3)和(5)进行了仿真验证,作为对比,选取了和文献[6]相同的异构多智能体系统,并加入了输入和速度的饱和特性。设v1、v2和v3是二阶智能体,v4、v5和v6是一阶智能体,v0是领航者。图1(a)为无领航者的多智能体系统的通信拓扑图,图1(b)为有领航者的多智能体系统的通信拓扑图。假设智能体之间的通信信息存在部分缺失,通信拓扑图的连接矩阵如下:
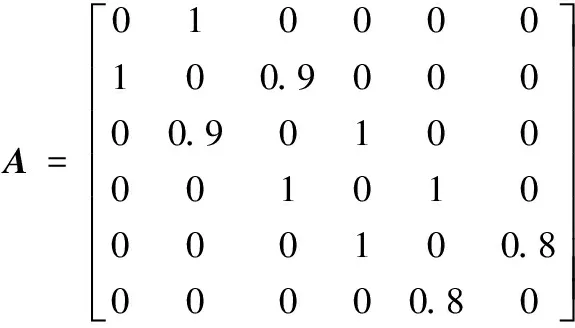
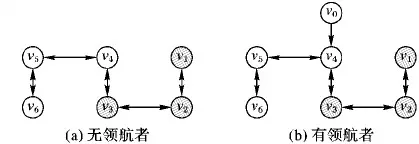
图1 多智能体系统的通信拓扑图
3.1 仿真算例1
考虑当智能体系统无领航者时的情况,假设Δu=0.3和Δv=0.2,智能体的初始值设置为:
[ζ1(0),ζ2(0),ζ3(0),ζ4(0),ζ5(0),ζ6(0)]=
[50 20 -30 30 0 -15]
[η1(0),η2(0),η3(0)]=[-0.2 0 0.2]
第一组增益的仿真结果如图2所示。由于选择的增益参数没有在计算的取值范围内,可以看出,多智能体系统位置状态和速度都没有达到一致。第二组增益的仿真结果如图3、4所示。由于选择了正确的增益参数,由图3可以看出,多智能体系统位置与速度最终达到一致;图4则显示了多智能体的输入饱和特性的演化曲线,可以看出,最终每个智能体的输入最终收敛为零。
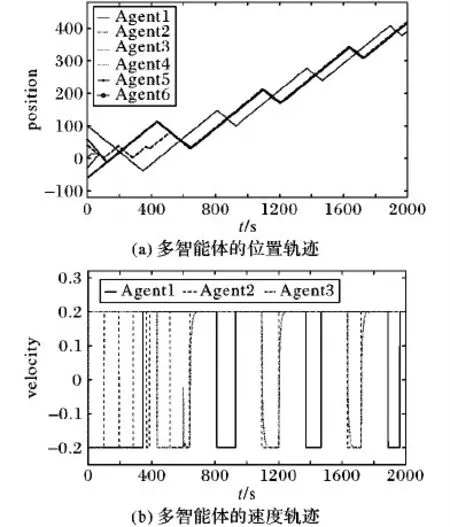
图2 通信增益时的仿真结果
3.2 仿真算例2
考虑当智能体系统有领航者时的情况,假设Δu=0.3和Δv=0.2,智能体的初始值设置为:
[ζ0(0),ζ1(0),ζ2(0),ζ3(0),ζ4(0),ζ5(0),ζ6(0)]=
[10 45 20 -25 30 0 -15]
[η1(0),η2(0),η3(0)]=[-0.2 0 0.2]
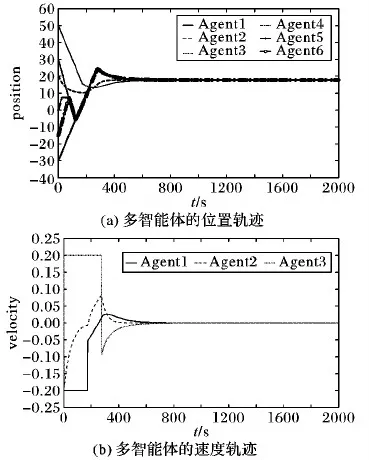
图3 通信增益时的仿真结果
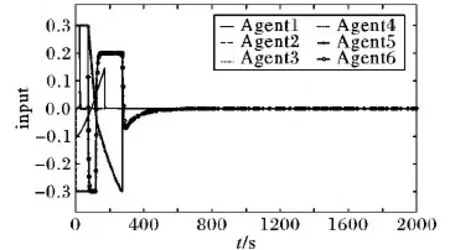
图4 通信增益时的智能体输入
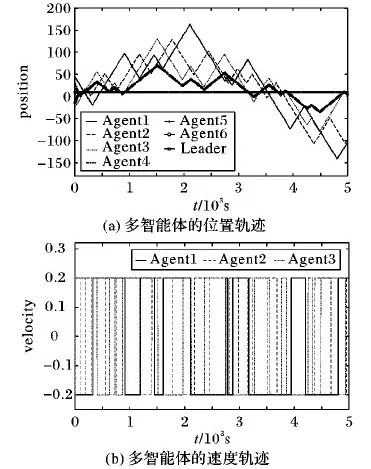
图5 通信增益时的仿真结果
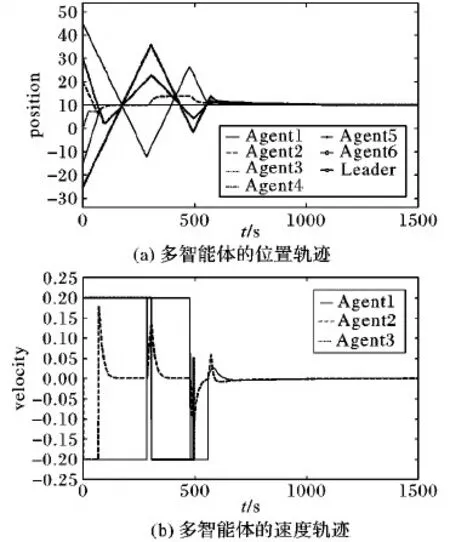
图6 通信增益时的仿真结果
4 结语
针对由一阶智能体与二阶智能体组成的具有输入和速度饱和的异构多智能体系统的半全局一致性问题,在无需避免控制器的输入超出饱和函数边界且二阶状态(速度)存在饱和的情况下,本文提出了无领航者和有领航者的分布式控制器,并通过Lyapunov稳定性理论计算出了控制器增益的最大取值范围。由理论分析得出,只需要计算一个增益的取值,便可以同时解决输入和速度的饱和问题。由仿真分析可以看出,无论系统中有无领航者,当通过计算选取正确的通信增益时,就可以保证异构多智能体系统实现一致性。考虑当智能体间的通信具有Markov跳变的通信扰动,同时智能体的执行器具有死区时,增益的变化同时会影响到通信干扰的大小,因此,如何去除执行器的死区问题同时又不会使通信干扰过大是未来的研究重点。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
中等数学(2021年9期)2021-11-22
今日农业(2021年5期)2021-05-22
汽车维修技师(2019年2期)2019-08-23
舰船电子工程(2018年12期)2019-01-03
航空模型(2017年12期)2018-05-08
数学学习与研究(2017年20期)2018-01-02
留学(2017年5期)2017-03-29
