海洋二号卫星回波模拟器远程控制的设计
2018-10-24 07:46万鑫瑞
电子设计工程 2018年20期
万鑫瑞
(1.中国科学院国家空间科学中心北京100190;2.中国科学院大学北京100049)
星载微波高度计[1]是一个复杂的雷达系统,利用回波模拟器采用射频仿真技术对星载雷达高度计进行测试验证是一个相对理想的方法[2]。回波模拟器负责将雷达信号进行信号处理后得到的具有发射特性和目标散射特性的回波信号发送给雷达接收机。因此回波模拟器是星载卫星高度计回波模拟器的重要监测设备[3]。
回波模拟器需在高度计分系统联试、测试,以及整星联试、测试中为高度计提供满足要求的点目标回波、面目标回波。为达到对高度计定量评估的目的,需要回波模拟器具有良好的稳定性和长期一致性。然而在整星联调和发射场测试阶段由于实验场地环境限制,回波模拟器只能在设备旁边进行操作,且每次开机操作都需要有人进入测试现场。由于测试现场设备众多,且存在大功率发射机,流程严格,不允许有操作人员进入周围,导致回波模拟器操作不便利,带来一定的麻烦和风险[4]。因此对新模拟器增加远程集中管理和控制是必要的。并且为了提高可靠性和稳定性,采用高速率的远程控制十分的必要[5]。
1 远程控制系统方案设计
本系统旨在通过远程计算机与回波模拟器进行数据交互,发送指令对回波模拟器进行操作,发送数据对回波模拟器进行参数设置,以及将回波模拟器采集到的回波数据回传储存显示。远程控制系统总体结构示意图如图1所示。

图1 系统总体结构示意图
将远程控制系统采用软硬件结合的方式分为上位机和下位机(数控单元)两个部分。系统的整体架构如图2所示。
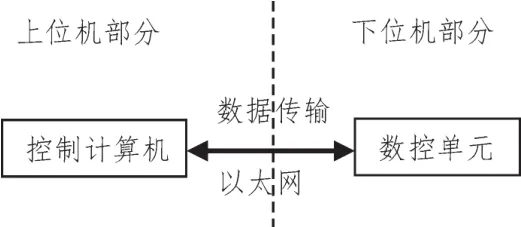
图2 系统整体架构示意图
海洋二号卫星高度计回波模拟器远程控制系统具有如下的功能:
1.1 系统上位机部分
上位机开发一个基于客户端/服务器(Client-Server,C/S)结构[6]的远程控制软件,通过传输控制协议/因特网互联协议(Transmission Control Protocol/Internet Protocol,TCP/IP)协议与下位机连接通信。通过千兆以太网与下位机实现高速率的稳定传输。完成人机交互功能,实现指令的解析并将控制指令发送给回波模拟器,实时高速的接收回波模拟器发送来的数据并将其储存在数据库中,并且将历史数据和设备状态用图表等形式显示出来,供相关人员查看分析。
1.2 系统下位机部分
下位机即数控单元用来完成海平面回波模拟信号的生成,对高度计信号的捕获跟踪,对高度计信号采集和储存。实现系统的时序控制,工作模式控制,接受信号处理,回波数据的生成等。建立千兆以太网传输通信方式[7],自定义设置网络这件互连的协议(In⁃ternet Protocol,IP),实现高速稳定可靠的数据传输。
2 远程控制系统的硬件结构
2.1 系统硬件总体设计
本系统硬件设计是实现回波数据采集、回波数据的输出传送、指令状态接收、参数数据设置的基础。
数控单元硬件包括核心射频接收发射模块、模数转换器(Analog-to-Digital Convert,AD)、模数转换器(Digital-to-Analog Convert,DA)、双端口随机存取存储器(random access memory,RAM)、千兆以太网模块、并行数据读写PIO模块。系统结构构成如图3所示。

图3 数控单元结构设计图
2.2 回波模拟器数据核心模块设计
回波模拟器核心模块采用了基于TMS320C6701微处理的高速数字信号处理(Digital Signal Processing,DSP)技术以及基于XC4005E的现场可编 程 门 阵 列(Field- Programmable Gate Array,FPGA)技术。以TMS320C6701位核心由FPGA实现所有时序控制。采用大容量的高速双端口RAM来储存和处理运算数据。并且使用AD9117中频采集芯片进行AD采集一级数据调制(in-phase and quadrature,IQ)正交解调[8]。
2.3 千兆以太网模块
PL到PS端的数据传输通过AXI DMA总线进行数据交互。上位机和PS端的数据传输通过千兆以太网模块实现。通过数据校验以及办卡设计实现数据高速稳定的传输。数据传输过程如图4所示。

图4 数据传输流程图
其中PL侧到PS侧的数据传输是利用总线协议(Advanced eXtensible Interfac,AXI)动态内存分配(Dynamic-Memory-Allocation,DMA)IP核 通 过simple transfer方法并结合乒乓操作[9]的传输方式,两个缓冲区交替进行数据的接收。每次DMA传输[9]都需要通过PS侧主动发起,PS通过AXI总线配置PL侧的AXI DMA内部寄存器,发起一次DMA传输。然后通过PS的Slave AXI GP接口传输至PS双倍数据速率内存(Double Data Rate,DDR3)的缓存中。其中PS接收数据的位宽必须大于或者等于PL实际传输的数据长度。
发送流程如图5所示。

图5 发送流程逻辑图
PL每发完一次数据,AXI DMA IP便会产生一个中断信号,PS得到中断信号后将DDR3缓存的数据通过乒乓操作的方式由TCP协议发送至个人计算机(personal computer,PC)。PS侧到PC机的数据通过TCP/IP协议[11]进行传输。TCP/IP协议也即是传输控制协议/因特网互联协议,是一种通过3次握手实现的可靠的全双工协议。使用Lwip函数库[12]来实现TCP/IP协议,Lwip函数库是用于嵌入式系统的TCP/IP协议栈[12],通过mailbox与内核进行通行,然后用户阻塞在一个专门的mailbox上,内核完成用户的请求后post该mailbox,用户得意继续执行,其可以与行在裸机的环境中并不需要操作系统的支持,传输效率比SOCKET API高。对Lwip函数库的配置提高TCP的传输效率,增大传输数据窗口大小并提高内部Emac DMA的数据迁移效率。
系统总体逻辑控制部分流程如图6所示。

图6 系统总体逻辑控制流程图
3 远程控制系统软件结构
3.1 通信字段及接口定义
TCP/IP采用小端对齐方式对数据进行封装。TCP字节流顺序为0XE2,0x03,0x30,0Xe5。每个数据包长度为1036字节,内容包括包头,包类型,子包计数,脉冲计数,包内容,包尾等6个部分。各个字段排列及大小如表1所示。
依据不同的功能下发不同的参数包,下位机根据定义的固定的包头和包尾数据对包进行解析,其中包头及包尾定义字节如表2所示。

表2 包头包尾数据定义
数据包功能包括下发DA数据、下发多普勒表、下发程序运行参数、程序上行参数、程序上行AD数据包,具体类型及参数定义如表3所示。

表3 数据包各类型参数定义
其中每个DA数据包长度为3 ms,根据实际时间长度对两端填0。例如,实际IQ只需1.5 ms,则将左右各0.75 ms数据填0.采样率2.5 MSPS,每个IQ数据包共2.5*3=7.5 kB个采样点.分为30包下发,依次在子包计数中填充0x01-0x1E。
运行时下位机作为服务器,上位机作为客户端,客户端连接建立后,会接收到程序上行参数,此外,每500 ms可接收到1次程序上行参数。
上位机发送多普勒数据给下位机,跟据下位机DA缓冲区状态向下位机发送数据包,下位机DA缓中区大小为50 MB。上位机发送程序运行参数给下位机。
上位机若要读取下位机AD采集数据,需向下位机发送下发程序运行参数,并将第6字节置为0x55,下位机会返回1个脉冲的AD采集数据(3750字节或7500字节)。
3.2 软件结构及功能
回波模拟器远程控制系统的上位机软件部分是基于LabVIEW开发环境[13]编写完成。完成包括指令控制,参数设置,数据传输,数据存储,交互通信,功率监测,用户操作交互等功能。系统采用TCP/IP协议建立与回波模拟器的连接,实现高速率稳定传输并监听监测心跳保证连接的可靠性。程序流程图如图7所示。

图7 程序流程图
上位机的GUI界面[14]组成包括指令控制,数据交互两大模块。其中指令控制包括开关控制,模式切换,参数设置。数据交互包括数据展示,数据储存,功率检测。其中数据展示是依据获取到的上行数据得到功率的数据,并将其用图形的方式展示出来,并且数据采用Sql Server进行标准数据格式的存储。具体结构如图8所示。

图8 上位机界面功能组成
4 系统测试
4.1 稳定高速率测试
测试千兆以太网的高速率稳定传输,使用Iperf工具[15-16]。Iperf是一个网络性能测试工具,可以测试最大TCP和UDP带宽性能,具有多种参数和UDP特性。可以根据需要进行调整,并且可以报告带宽、延迟抖动和数据包丢失情况。使用与下位机定义设置的监听IP号及端口号,进行连接检测传输TCP的带宽性能。传输速率结果如图9所示:

图9 传输速率测试图
可以看出每5秒报告的TCP数据包发送速率稳定在76 MB/s左右。
4.2 系统功能测试
测试完成远程控制系统的各个功能效果。实现了回波模拟器的远程控制功能,参数设置,数据传输,功率监测及数据存储能回放等功能。系统界面操作图如图10所示。

图10 系统操作界面示意图
通过按钮断开或开启下位机连接,当TCP连接上以后现实绿色保持连接状态。左半部分进行各个参数的设置完成参数的下发。右半部分进行多普勒,DA等数据传输和下发。
上位机部分接收返回的功率信号实现功率波形监测。其中波形图可放大或缩小展示也可以通过保存数据将数据保存成本地文件格式。如图11所示。

图11 工具波形监测图
5 结论
文中设计的海洋二号卫星高度计回波模拟器的远程控制方案可以用于星载设备的远程控制,测试和联调。能够解决设备的模式切换、参数设置、数据载入等操作复杂易出错的问题;解决在卫星联调合发射场的测试过程中,回波模拟器只能在设备旁边进行操作的问题;解决每次开机操作都需要进入设备众多流程严格的测试现场的问题。解决数据的高速率稳定传输的问题,实现数据的实时显示及历史数据储存。
该方案为卫星提供了性能稳定可靠的回波模拟器控制效果,有助于灵活方便的对设备进行远程控制和效果查看。该方案对于卫星设备的远程操作提供了一个较为完善的解决方案。
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
海洋通报(2021年3期)2021-08-14
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
海洋学报(2020年3期)2020-05-22
成都信息工程大学学报(2019年6期)2019-08-13
科技与创新(2018年1期)2018-12-23
电子与信息学报(2016年10期)2016-10-29
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07