
基于Simulink永磁同步电机调速系统设计与仿真*
2018-11-01 09:12高文根范培珍何其宝
九江学院学报(自然科学版) 2018年3期
何 睿,高文根,范培珍,何其宝
(1 安徽工程大学检测技术与节能装置安徽省重点实验室 安徽芜湖 241000;2 六安职业技术学院 安徽六安 237000)
永磁同步电机(permanent magnet synchronous motor PMSM)是一种以三相电流通入定子绕组中形成旋转磁场,安装有永磁体的转子随旋转磁场一起转动的电机。目前,永磁同步电机主要分为矢量控制和直接转矩控制,两种控制策略都可以实现高动态性能变频调速系统的设计,其中矢量控制具有调速范围宽、启动转矩大、工作可靠和操作方便等特点。随着理论研究的发展,许多现代控制理论中的控制策略被逐渐应用到永磁同步电机的调速系统中,其中滑模控制理论在提高鲁棒性上有独特优势。为了使永磁同步电机调速系统对参数变化及扰动不灵敏,提高系统的稳定性和鲁棒性,设计滑模控制器对系统的速度反馈进行调节控制[1-3]。
系统以永磁同步电机为研究对象,利用空间矢量脉宽调制原理(SVPWM)和滑模控制(SMC),基于Matlab/Simulink搭建永磁同步电机调速系统仿真平台。
1 永磁同步电机调速系统

2 永磁同步电机数学模型
为了便于系统的设计,以表贴式永磁同步电机为例建立d-q坐标系下的数学模型为:
(1)
为了使表贴式永磁同步电机获得较好的控制效果,系统采用 的转子磁场控制方法,此时可以由式(1)变换得到:
(2)
式(1)和式(2)中,μd、μq、id、iq为d-q坐标系下的定子电压和电流;R和Ls分别为定子电阻和电感;Pn为微分算子;J为电机转动惯量;TL为负载转矩;ωm为旋转角速度;ψf为转子磁链。
3 滑模控制器设计
定义永磁同步电机系统的状态变量:
(3)
其中: 为给定的转子角速度。由式(2)和(3)可得:
(4)

(5)
定义滑模面函数为:
[s=cx1+x2]
(6)
其中: 待设计参数应大于零。对于式(6)求导,可得:

(7)
为了使永磁同步电机驱动系统具有比较好的动态品质,系统采用指数趋近律方法,可得控制器的表达式为:

(8)
(9)
在实际系统中,滑模控制中的抖动是必定存在的,若消除抖动就会消除滑模控制的抗扰动能力,因此消除抖动是不可能的。为了消除系统稳态误差和削弱抖动现象,滑模控制中加入了积分环节。
4 SVPWM的算法实现
PMSM需要气隙形成圆形旋转磁场,SVPWM的核心就是控制逆变器6个功率开关器件的开关时刻,使三相输出合成电压产生磁链矢量轨迹符合电动机磁通轨迹为圆这一要求。逆变器采用上、下管换流,将上臂桥导通用数字“1”表示,下臂桥导通用数字“0”表示,可以得到8种基本工作状态对应8个基本电压空间矢量,可表示为:(000),(001),(010),(011),(100),(101),(110),(111),其中(000),(111)为零矢量,将整个复平面空间分为6个扇区(Ⅰ~Ⅵ)。位于复平面中任一扇区的合成电压矢量Ursf都可以由其相邻两个基本失量合成,并且计算出这两个基本矢量作用时间,便可以算出相应的脉冲宽度,从而实现对逆变器的控制[4-8]。

为了求解每个扇区内相邻两个非零矢量和零矢量作用时间Tx、Ty、T0,定义:
(10)
其中T为PWM周期,Udc为直流侧电压,Tx、Ty按表1赋值,并进行饱和判断。如果Tx+Ty>T,则取Tx=TxT/(Tx+Ty),Ty=TyT/(Tx+Ty) 。
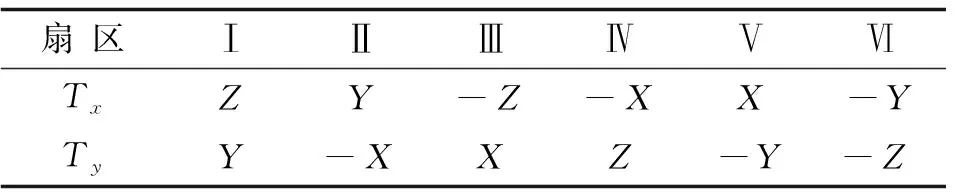
表1 Tx、Ty取值表
为了方便计算矢量扇区器切换点Tcm1、Tcm2、Tcm3,先定义:
(11)
由表2可得各个扇区切换点时间。
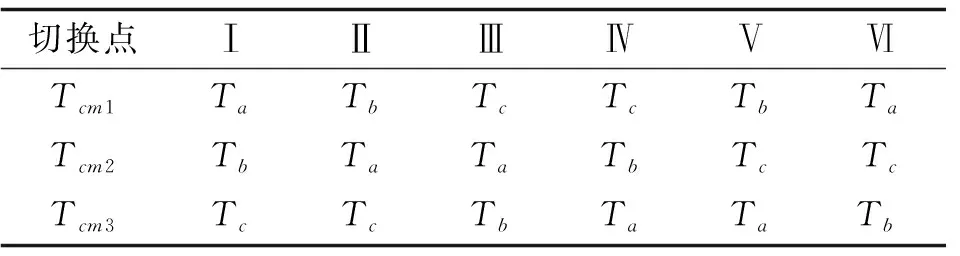
表2 扇区切换点的赋值表
把载波信号设为一定频率的三角波,各个扇区切换点与载波信号进行比较,从而产生PWM脉冲信号控制逆变器的运行。
5 仿真及结果分析
为了验证所设计的永磁同步电机调速系统的控制效果,根据图1所示的永磁同步电机调速系统控制框图,在Simulink中建立仿真模型。系统仿真中永磁同步电机空载启动,给定速度的初始值设为Nref=800r/min;当t=0.1s时给永磁同步电机增加15N·m的负载,当t=0.2s时将给定速度阶跃至1200r/min。

图1 永磁同步电机调速系统仿真图
永磁同步电机调速系统的仿真结果如图2-5所示。由仿真结果可以看出:在空载情况下启动永磁同步电机,系统控制永磁同步电机达到给定的初始速度值Nref=800r/min和恒定转矩状态下稳定运行大约需要经过0.05s,在t=0.1s时负载转矩由0阶跃至15N·m,实际转速出现略微下降后又重新调整到800r/min稳定运行,输出转矩可以快速调整至15N·m,整个过程大约需要 0.04s。电机输出转矩在表明调速系统对永磁同步电机的控制具有较好的抗干扰能力。在t=0.2s给定的初始速度提至1200r/min时,调速系统对永磁同步电机控制使实际转速和输出转矩出现波动后达到稳定状态,整个过程大约需要0.05s。表明调速系统对永磁同步电机的控制具有较快且稳定地带负载转速跟踪性能。电机三相电流在仿真过程中出现明显波动,但可以在短时间内调整至平衡状态[9-12]。逆变器输出的电压产生的响应波形谐波含量很少。

图2 永磁同步电机转速仿真图

图3 永磁同步电机转矩仿真图

图4 逆变器输出电压仿真图
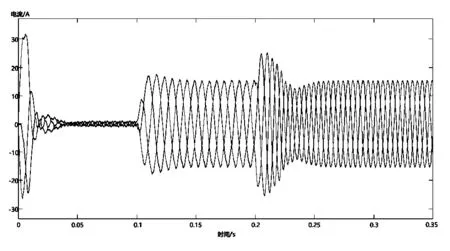
图5 永磁同步电机三相电流仿真图
5 结论
综上所述,该设计的永磁同步电机调速系统在Simulink平台进行仿真可以稳定运行,对电机转速可以快速精准控制,对负载变化影响系统稳定性具有较强的抑制效果,系统设计合理,具有较好的静动态特性、稳定性、鲁棒性。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
南北桥(2022年2期)2022-05-31
防爆电机(2021年2期)2021-06-09
中国民航大学学报(2019年1期)2019-04-13
中国惯性技术学报(2019年6期)2019-03-04
航空学报(2018年12期)2019-01-18
电脑知识与技术·经验技巧(2017年9期)2018-02-24
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年7期)2016-11-16
