
BIM放样机器人技术在地铁施工测量中的应用
2018-11-01 03:15蔡磊磊
城市勘测 2018年5期
蔡磊磊
(北京拓普康商贸有限公司,北京 101102)
1 引 言
BIM技术目前已经在世界范围内广泛应用于建筑设计、施工和土木基础设施等行业。目前国内的大型建筑承包商已经在一些大的项目中全部或部分分项工程引入了BIM信息化施工管理技术,并在不断积极探索和应用各类BIM技术,对工程施工的各个环节和各个工种进行渗透和扩展,让施工过程更加智能高效,以带来更好的工程质量和经济效益。
随着我国社会经济的快速发展以及城市化进程的加快,修建地铁和轨道交通对于改善城市交通环境具有不可忽视的作用。据相关统计数据显示,截至2017年12月,中国大陆建成投运地铁的城市已达31个,数十个城市的地铁和轨道交通还在持续修建中。这些地铁项目中有一些已经全部或分项工程引入了BIM信息化施工管理的工作流程,因此也必须相应地引入适用于BIM工作流程的工程设备及测量定位设备。作为地铁施工的一个重要而基础的环节,工程现场的各类建筑、结构和MEP机电设施设备的精确施工定位,成为一个可以跟BIM模型相结合的热点应用方向,用来提升施工现场测量作业人员的工作效率和定位精度。因此BIM放样机器人在这类项目中就大有用武之地。本文介绍了BIM放样机器人的工作流程,结合某地铁车站施工实践,阐述了BIM机器人用于快速定位BIM模型中的三层土建施工控制点和大量结构及管道设备放样点的作业方法,并对放样精度进行检核。
2 BIM放样机器人工作流程
Topcon LN100(Layout Navigator的缩写,直译为放样领航员)是一款专门的BIM放样机器人,也是一台高度简化和智能的测量机器人,具备3°范围的自动整平功能、20 Hz定位数据更新速率,100 m半径的棱镜跟踪功能,专门为建筑施工放样而设计。LN100支持Autodesk(欧特克)公司开发的BIM 360 Layout建筑施工放样软件,如图1所示,该软件是一款手簿移动端应用程序,可以利用BIM 360云端的数据同步服务,目前是基于IOS系统开发的,因此手簿使用iPad平板电脑即可。实现了工程数据从设计到工地的无缝对接,为施工人员提供了一个结合设计模型和放样操作的高效单人测量系统。

图1 LN100搭配BIM 360 Layout软件
采用BIM放样机器人进行建筑物放样,主要包括放样点位的设计和提取、模型数据云端同步、实际放样等。
2.1 放样点位的设计和提取
内业人员先使用AUTODESK Revit、Navisworks、CAD或其他BIM建模软件完成放样设施的模型设计,然后再使用点位提取插件Autodesk Point Layout在模型中添加和提取好设计的若干控制点和放样点,如图2所示,如果点位较多,可以批量提取。

图2 设计模型中提取点位
2.2 模型数据云端同步
将带有海量点位信息的BIM模型上传至云端服务器;现场施工放样人员在作业前,需在平板电脑上打开BIM 360数据同步软件,登录云端服务器,将设计模型下载至软件,云端模型上传和下载如图3所示。

图3 云端模型上传和下载
2.3 实际放样
现场测量人员将安装有BIM 360 Layout应用程序的平板电脑利用WiFi与Topcon LN100放样机器人连接上,选取下载好的放样模型,然后通过软件提供的设站方式(后视定向和后方交会,根据现场情况任选其一)完成测站设置,便可以开始点位放样工作;根据软件中实时显示并提示棱镜所处3D模型的位置及距离设计点的偏移量数据,LN100即可迅速引导棱镜到工地现场的实际设计位置,精确定位控制点和放样点,仪器设站和模型点放样如图4所示。

图4 仪器设站和模型点放样
3 工程应用案例
某地铁车站施工全面引入了先进的BIM建筑施工技术和理念,整个车站的3层建筑结构空间及其相关站厅附属设施均设计了专业的BIM模型供施工各环节、各参与方协同作业、共享使用,施工方在工程建设的许多环节和专业引入了一整套BIM解决方案,在施工测量环节也使用LN100 BIM放样机器人来开展测量定位工作。在该地铁站施工过程中,BIM机器人用来快速定位车站BIM模型中的3层土建施工控制点和大量结构及管道设备放样点,地铁车站的综合BIM模型如图5所示。
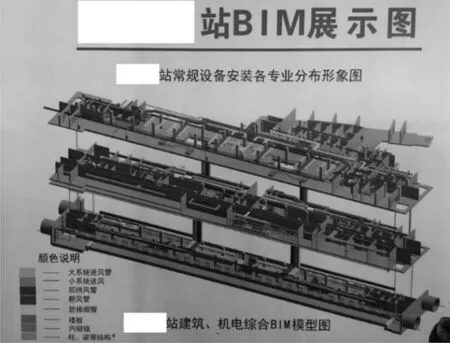
图5 地铁车站的综合BIM模型
实地作业时,现场只需要一名作业人员即可开展放样工作:首先,在现场任意一个通视条件良好的位置架设LN100仪器,开机后仪器会自动整平,无须任何人工干预和操作,人员只需操作平板电脑通过WiFi连接仪器,进入BIM 360 Layout软件的设站界面,采用后视法或后方交会法设站,设站原理跟全站仪完全一致,设站完成后,车站的BIM模型中随即出现LN100仪器和放样对中杆及棱镜的三维仿真模型,且位置与现场实际位置精确吻合,这时作业人员对手中真实棱镜的任何移动都会在软件界面中被同步模拟显示,也就是说出现了两个完全一致且实时动态对应的位置空间——现实作业空间和软件模拟空间,BIM放样机器人地铁施工现场如图6所示。

图6 BIM放样机器人地铁施工现场
然后,即可在车站三维模型中任意选择所需的设计点位,开始直观立体的放样工作,如图7所示为BIM放样软件界面,任意一个放样点被选中后,软件会立刻显示棱镜距离该放样点的空间三维偏移量(前后、左右、上下)数值,精确到毫米,引导作业员快速移动到放样点所在位置,这个过程中LN100能够始终保持对360°棱镜的高速自动跟踪、持续测量(每秒20次的测量数据更新率),作业人员根据软件中直观的模型动态变化、视图智能切换以及声音、图标、色彩等多重提示,便能迅速确定放样点位置,平面和高程精度都可以控制在 ±1.5 mm;在一处设站即可放样通视视野内所有目标点;第二种放样模式:在调取放样点后,可操纵仪器先精确地转动到放样方向,作业员再根据仪器的指向和红绿放样导向光快速到达放样方向,仪器迅速重新锁定棱镜,引导作业员快速确定放样点位置;如果有必要,还可以临时在模型中捕捉和添加特征点位进行放样。

图7 BIM放样软件界面
放样完成的坐标数据会自动存储至BIM模型,便于上传回云端,利用内业软件对放样点精度进行检查和评估。图8为放样点位精度检查。

图8 放样点位精度检查
上述整个放样流程,不需要专业的测绘人员操作,只需简单掌握测量设站的原理和空间直角坐标系知识即可,降低了推广使用的难度,精度也有保证,因此对于施工人员具有较好的适用性。
4 结 语
测量机器人已经诞生了二三十年时间,虽然还未大范围普及,但已不是什么稀奇的测量设备,但先进的放样机器人硬件结合直观的模型放样软件,实现完全的智能单人BIM测量系统,还是近年来刚刚开始流行的测绘新技术和新趋势,其目标直指BIM工程现场的施工放样流程,同时降低了对作业人员的专业要求,再加上便利的数据流同步与共享,使得现场模型定位工作高效便捷,同时精度也能满足设计要求。
实践证明这类装备和技术可以适用并满足此类BIM项目的实际需求,可以在各项BIM工程项目尤其是地铁建设工程中推广应用。随着建筑和基础设施行业应用BIM技术的发展浪潮,BIM放样机器人的应用必将日益广泛。
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
湖北植保(2022年4期)2022-08-23
土壤(2021年1期)2021-03-23
航天制造技术(2020年4期)2020-09-11
少儿美术(快乐历史地理)(2020年4期)2020-02-24
学苑创造·A版(2019年4期)2019-05-10
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
土壤学报(2017年5期)2017-11-01
福建农业学报(2016年6期)2016-11-01
