非接触式水位计校准装置的研制与应用
2018-11-01 01:46史占红戚珊珊周川辰
水利信息化 2018年5期
史占红,戚珊珊,林 仪,郝 宁,周川辰
(水利部南京水利水文自动化研究所,江苏 南京 210012)
0 引言
水位监测是水文监测中最基本的监测要素之一。常用的水位测量仪器有浮子式、压力式、超声波、雷达等水位计。浮子式水位计结构简单,工作稳定可靠,准确性好,价格低廉,在国内水文测站大范围使用,但需配建水位测井。近年来,随着国家防汛防旱工作对中小河流水文监测的要求不断提高,水位测量传感器也由早期的简单型、单一型发展为数字型及智能型。近几年从国外引进的雷达水位计等非接触式水位计,技术成熟,测量精度高,易安装,而且不受环境、地理的限制,因此在水利行业应用越来越广泛,目前国内非接触式水位计的各类产品也迅速发展[1]。
作为水位要素的测量仪器,测量数据的准确性和一致性对国家防汛减灾及实行最严格的水资源管理等工作都具有非常重要的意义。目前对于浮子式、压力式水位计的实验室校准最常使用的是十米水位试验台,十米水位试验台一般由水位测井、给排水和标准测量系统等组成,通过升降水位测井内的水位模拟水位计的实际工作场景,并由高精度水位测量系统提供标准水位数据。目前国内水利、交通、海洋等行业都已建有该类型检测装置。
十米水位试验台可对浮子式、压力式水位计进行有效的校准,但对非接触式水位计的校准有一定的局限性。一般测井内径为 1.2 m,测量有效高度为 10 m,可适应波束角α≈ 6° 以内的非接触式水位计。然而,水文系统中常用的雷达及超声波水位计的波束角多为 12°,以 10 m 有效测量范围计算,所需最小测井内径D= 10×tan 6°×2 ≈ 2.1 m,十米水位试验台显然无法满足其校准需求。为保证非接触式水位计测量数据的准确性、一致性,研制一种新型的非接触式水位计校准装置(以下简称新型校准装置)是十分必要的。
1 非接触式水位计测量误差的分析
非接触式水位计的工作原理是,利用波的反射作用,通过反射时间及波速计算出水位计探头与水面的距离,根据现场水位基值,得到测量水位数据。距离计算公式为

式中:Z为水位计探头至水面距离;v为声波、电磁波或光波的传输速度;t为水位计探头发出到接收回波的时间。
根据超声波、电磁波、激光 3 种波的传播特性,电磁波与激光的波速稳定,基本不受外界气候因素的影响;超声波波速受气温、相对湿度和大气压力等外界环境因素影响较大,经试验及实际应用证明,气温是影响测量精度的最主要因素,由此产生的声速变化量约为 7%。现有的超声波水位计需要同时进行温度测量,用来修正水位值。但超声波水位计内部的温度测量点无法完全表征声波测量路径的平均气温,对于 10 m 量程的测量,如果温度测量误差为 1℃,引起的水位误差可达 2 cm[2]。
非接触式水位计的安装水平度也是造成测量误差的重要因素,安装时应尽量确保水位传感器发射波束与水面垂直。如安装不当或由于环境因素(如大风)致水位计支架摆动,使水位计产生倾角θ,则会对水位的测量产生一定的误差。安装误差示意图如图1 所示,当水位计发生倾斜时,测量值为Z1,而实际的垂直距离为Z0,两者之间的误差 ΔZ为

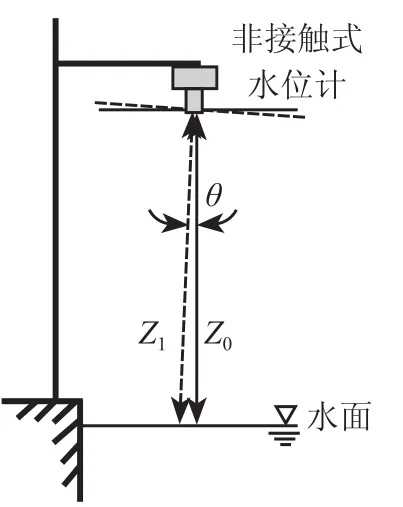
图1 安装误差示意图
当水位计量程为 10 m,发生 5° 倾角时,可以计算,测量误差最大将达到 3.8 cm,且测量范围增大,测量误差将会更大[3]。
此外非接触式水位计波速角如果过大,易受到周边障碍物的干扰,也会造成水位测量的不准确[4]。
2 新型校准装置的研制
研制的新型校准装置工作原理示意图如图2 所示。新型校准装置保持被测量水面不变,通过改变被校准水位计与测量水面的相对位置,在各测量点比较被校准水位计测量输出值与真实位置之间的差异,从而获得被校准水位计的测量误差。
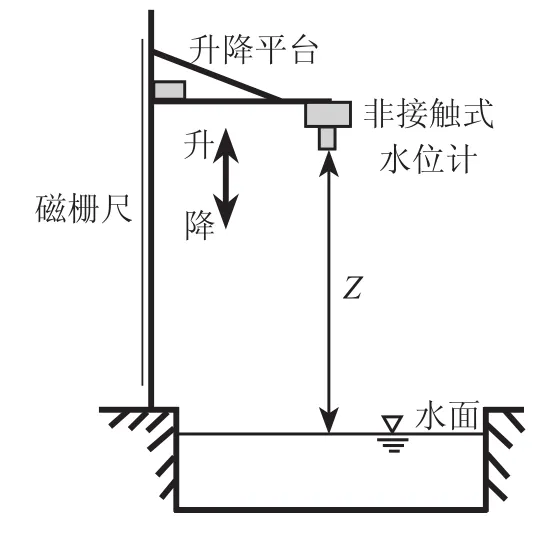
图2 新型校准装置工作原理示意图
新型校准装置主要由数据采集与控制、升降、数据测量、人机界面、视频监视等子系统组成,各子系统之间的工作接口如图3 所示。
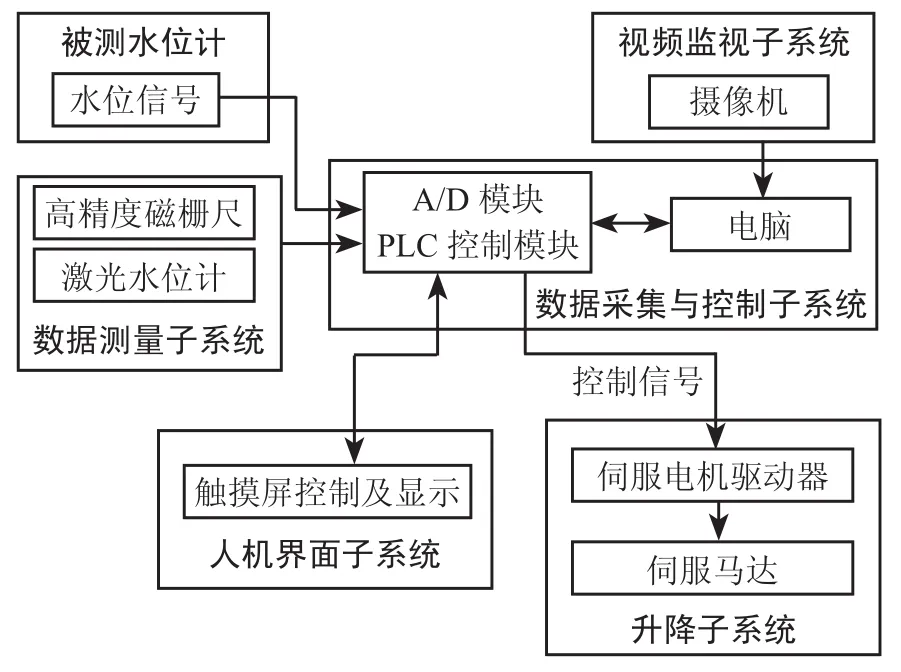
图3 新型校准装置结构组成示意图
2.1 数据采集及控制子系统设计
数据采集平台用于采集被校准水位计的测量数据及校准平台的真实位置数据,从硬件设计上保证不同仪器接口的可连接性。针对模拟信号输出的仪器,采用 A/D 转换模块进行连接;针对数字信号输出的仪器,可通过 RS-485 和 232 等接口进行连接。数据采集平台具有测量数据采集、分析处理、检测报表生成等功能,数据采集传输方案如图4 所示。
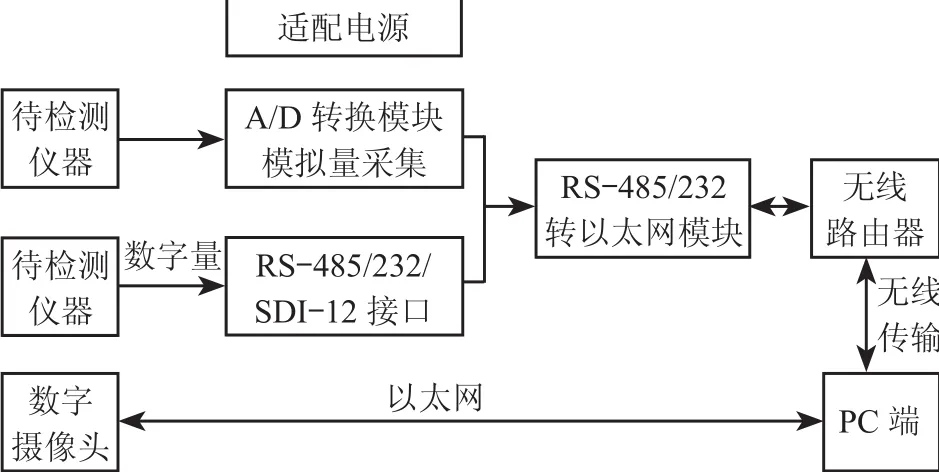
图4 数据采集传输系统示意图
控制系统由人机操作界面(电脑或触摸屏)向可编制控制器(PLC)发出控制指令,由 PLC 控制伺服电机转动,使检测平台沿直线导轨上升或下降。当到达设定位置时,采集被校准水位计测量值及平台位置真实值,从而完成一个设定点的校准,通过重复这些操作,即可得到一系列检测点的校准数据。控制系统控制逻辑如图5 所示。
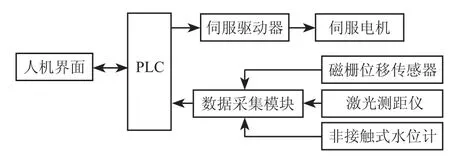
图5 控制系统控制逻辑图
2.2 数据测量子系统设计
数据测量子系统为被校准水位计提供量值溯源标准。新型校准装置选用的工作标准器为磁栅位移传感器,测量长度L= 10 m 时,磁栅位移传感器的标称测量误差为 ±( 25 + 20 ×10)μm = ± 0.225 mm。
对新型校准装置标准传感器的比对测试采用经检定过的 20 m 标准钢卷尺,标准钢卷尺通过国家计量院检定,最大允许误差为 ±0.33 mm[5]。比对测试结果如表 1 所示。
由表 1 可知,在 0~10 m 范围内,标准钢卷尺与磁栅尺比对误差最大值为 0.7 mm,新型校准装置运行定位精度优于 0.5 mm,回差不超过 0.1 mm,重复性标准差为 0.05 mm,各项精度指标能够满足对非接触式水位计的校准要求。
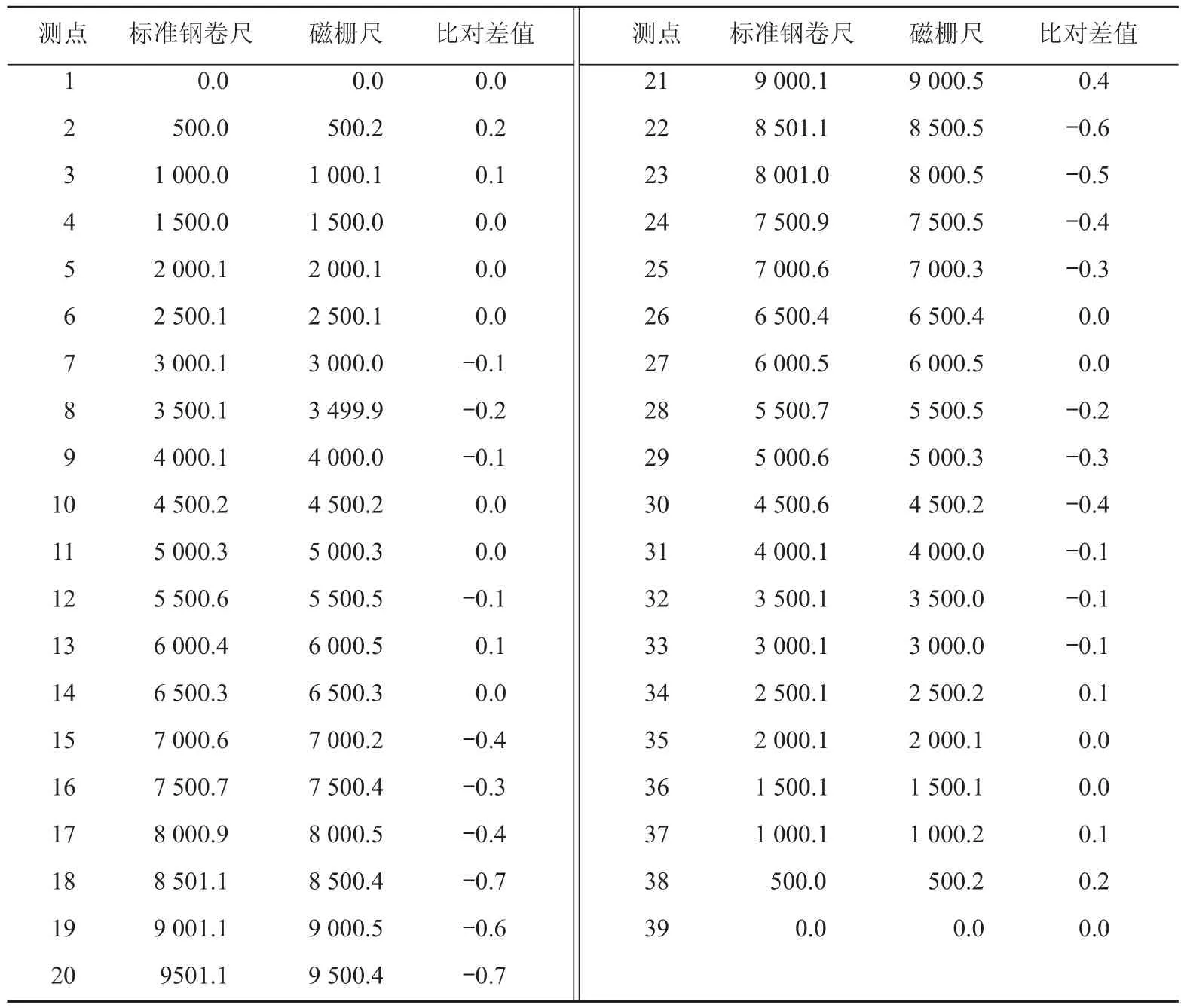
表1 比对测试结果 mm
2.3 升降子系统设计
升降子系统基座框架选用 100 mm × 100 mm 的工业铝型材,安装前使用重锤线建立竖直平面,安装完成后,进一步使用激光准直仪调校基座框架的垂直度。
升降子系统选用齿轮齿条传动方式,该传动方式能保证校准平台在上下传动过程中保持稳定状态,且可承受的载荷较大。选用的直线导轨移动时摩擦力小,只需极小的动力即可驱动,滑块内的滚珠可降低运行轨道接触面的磨损,长时间维持高定位精度。校准平台最大可达到 2 m/min 的升降速度,和传统校准方式相比较,可极大提高校准工作的效率。
3 新型校准装置的主要技术指标
新型校准装置的主要技术指标如下:
1)新型校准装置有效测量范围为 0~10 m;
2)新型校准装置最大允许误差不超过 1 mm;
3)最大升降速率不小于 60 cm/min;
4)适应最大波速角为 15°;
5)具有模拟量(4~20 mA)和数字量(RS-232,RS-485)等信号接口;
6)适用水位计类型为超声波、雷达、激光等非接触式水位计。
4 新型校准装置的应用
4.1 对激光水位计的校准应用
实验人员选用的激光水位计的光学测距传感器型号为 AMS 300i 40,标称测量范围为 200~40 000 mm,绝对测量精度为 2 mm,供电电压为 DC(18~330)V。实验人员将被检水位计安装于校准平台上,在 10 m校准范围内升降 1 个来回,每 500 mm 作为 1 个校准点,得出激光水位计各个校准点的测量误差。激光水位计的校准数据如表 2 所示。
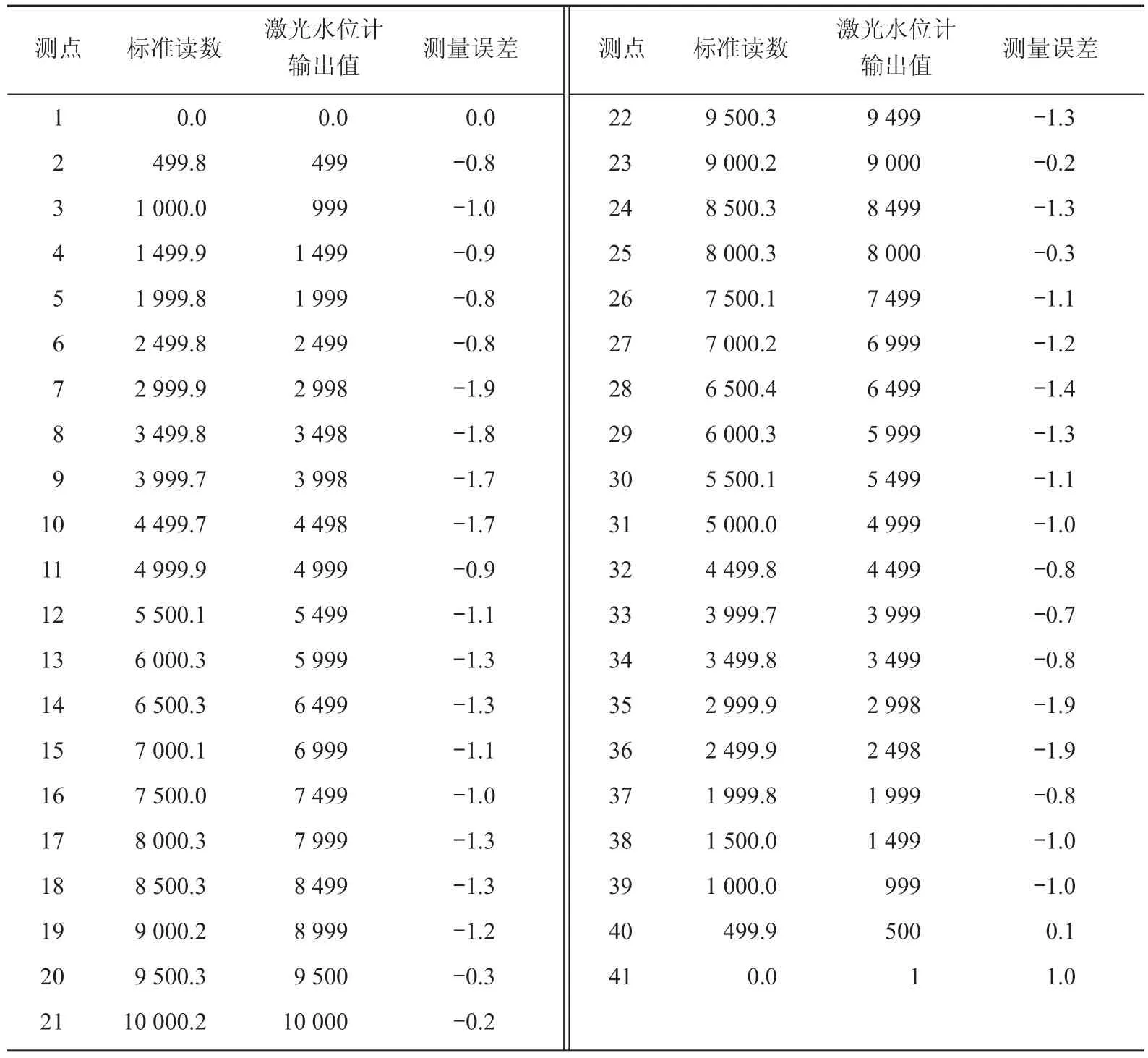
表2 激光水位计校准数据 mm
由表 2 可知,在 0~10 m 范围内,用新型校准装置对标称精度为 2.0 mm 的激光水位计进行校准试验,最大误差值为 1.9 mm,校准结果表明激光测距仪精度符合产品指标要求。
4.2 对雷达水位计的应用测试
实验人员选用的雷达水位计型号为 SEBAPuls 20 型,标称测量范围为 0~35 m,测量精度为± 2 mm,输出 4~20 mA 电流信号,校准方法与激光水位计一样,校准数据如表 3 所示。
由表 3 可知,在 0~10 m 范围内,用新型校准装置对标称精度为 2 mm 的雷达水位计进行校准试验,结果表明雷达水位计的精度不能满足产品标称指标要求,但校准数据满足 GB/T 27993—2011《水位测量仪器通用技术条件》规定的 1 cm 精度指标要求[6]。
通过对非接触式水位计的校准应用,验证了新型校准装置性能稳定,操作简便快捷,能很好地满足非接触式水位计的实验室校准工作。与原水位计检测系统相比,新型校准装置的测试精度由原检测系统的约 3.0 mm 提高到 0.5 mm,回程误差也大大降低,同时工作效率也提高了 1 倍,由原来校准所需 5~6 h 时间,减少到 2~3 h 时间。
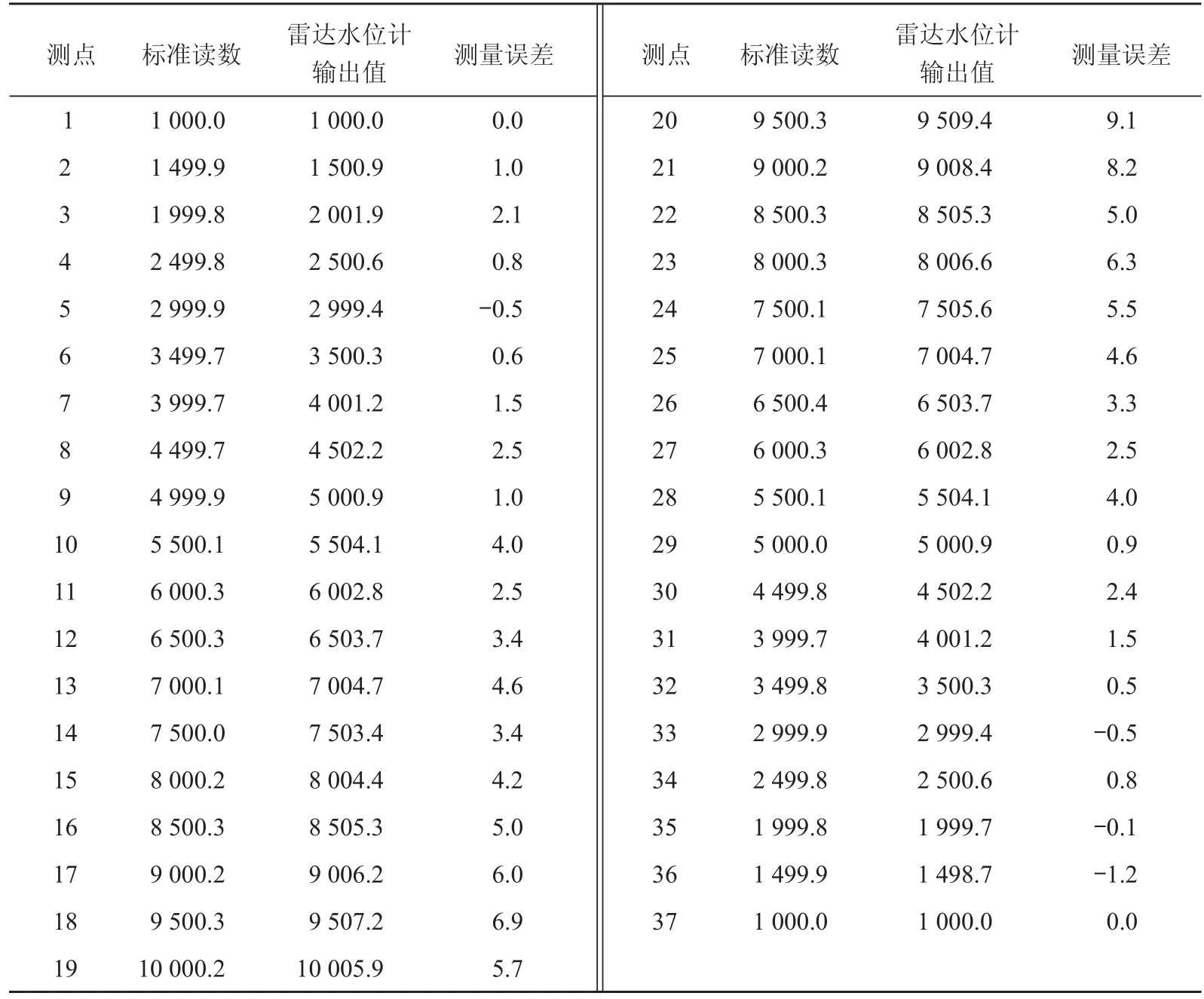
表3 雷达水位计校准数据 mm
5 结语
围绕现有非接触式水位计测量技术和误差的分析,完成了对非接触式水位计校准装置的研制工作。新型校准装置创新了非接触式水位计的校准模式,由常规的被校准仪器不动,水位升降的模式改为保持水面不动,被校准仪器升降的模式。新型校准装置能够适应 15° 以内的波束角,基本满足行业内主流应用的非接触式水位计的校准。新型校准装置的校准精度在 1 mm 以内,较传统校准方式 3 mm的精度有了很大的提高。同时新型校准装置大大提高了校准工作效率,能很好地满足非接触式水位计的实验室校准工作。新型校准装置的研制成功,为行业内大量应用的非接触式水位计的校准提供了新的手段。新型校准装置目前仅针对非接触式水位计的校准,今后将在此基础上进一步探索新的途径,使之能够适应浮子式水位计的校准工作,为水位测量仪器的数据准确性提供技术保障。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
设备管理与维修(2021年15期)2021-09-04
辽宁化工(2020年6期)2020-07-08
应用数学(2020年2期)2020-06-24
水运工程(2020年2期)2020-02-26
中国设备工程(2015年5期)2015-12-27
探测与控制学报(2015年4期)2015-12-15
华东理工大学学报(自然科学版)(2015年1期)2015-11-07
雷达学报(2014年4期)2014-04-23