基于滑模观测器的无人推力矢量飞机反步容错控制
2018-11-14 03:58李炳乾董文瀚马小山
西北工业大学学报 2018年5期
李炳乾, 董文瀚, 马小山
(1.空军工程大学 研究生院, 陕西 西安 710038; 2.空军工程大学 航空工程学院, 陕西 西安 710038)
随着空战武器的迅速发展以及空战任务的复杂变化,无人作战飞机将发挥越来越重要的作用。其中,制空型无人机是未来无人作战飞机的发展重点,是未来空战的战略制高点之一,强调高可靠性和机动性[1]。而推力矢量技术[2]可以显著提高作战飞机的机动能力,将推力矢量技术与无人作战飞机结合是未来无人作战飞机发展的重要方向,能够大大提高生存能力和作战能力[3-4]。F/A-XX是美国波音公司提出的具有超机动能力的六代战机,是一种能够独立作战的无人推力矢量飞机[1]。另外,飞机作超机动时,其气动力的强非线性和强耦合性[5],增加了舵面及执行器发生故障的概率,所以研究无人推力矢量飞机在超机动背景下的全局容错控制具有重要意义。
由于滑模观测器对动态系统的模型误差和外界扰动具有较强的鲁棒性,能有效抵御不确定因素的不利影响,保证系统的稳定性,因此在容错控制领域具有良好的应用前景。文献[6]首先通过坐标变换将系统状态分为是否包含执行器故障两部分,然后在滑模观测器中引入 鲁棒控制补偿未建模动态,实现对执行器故障的估计。同时对系统传感器故障采用相同的方法估计,二者并列进行。此方法故障估计效果较好,但是计算较为复杂且限制条件较为严格;文献[7]将不可观测系统重构为一个低阶系统,将系统状态视为低价系统的未知输入,然后针对低阶系统设计滑模观测器,实现对不可观测系统的状态及故障估计。但是系统重构的限制条件较多,限制了应用范围;文献[8]针对时间连续系统设计基于学习观测器的容错控制,实现对系统状态和执行器故障和传感器故障的同时重构。同时又进一步说明了学习观测器的存在条件;文献[9]将故障及干扰作为滑模观测器的输入,其输出又作为下一个观测器的输入,此过程不断重复直至满足故障和干扰同时解耦的条件,取得了较好的控制效果。但是此方法对故障输入矩阵和输出矩阵作了严格要求,不具有一般性;文献[10]首先将非线性马尔科夫跳变系统扩展为增广系统,然后设计滑模观测器对干扰、执行器故障及传感器故障进行估计,实现了容错控制,并进行了稳定性分析;文献[11]通过矩阵变换将非线性系统的执行器故障及传感器故障结合,针对故障及干扰设计鲁棒滑模观测器,实现对执行器和传感器故障及干扰的容错控制。但是矩阵变换及滑模观测器需满足较为严格的条件;文献[12]根据时标分离原则将飞翼布局无人机姿态控制系统分为内外回路,内回路采用自适应滑模观测器实现对复合干扰的估计和补偿,外回路采用二阶终端积分滑模控制器实现了对外回路的无抖振鲁棒控制;文献[13]设计2种降阶滑模观测器实现对包含干扰、传感器故障及执行器故障的线性连续切换系统的状态和故障估计。第一种方法通过对状态和故障的解耦,设计滑模观测器实现精确估计;第二种方法通过对干扰、传感器故障和执行器故障的重构,实现对故障的直接估计;两种方法都克服了传统滑模观测器的抖振问题,取得了较好的观测效果;文献[14]针对临近空间飞行器舵面故障设计基于神经网络观测器的反步容错控制,获得了较好的控制效果,但计算过程较为复杂。
本文针对包含外界扰动及模型误差等不确定性,舵面故障和执行器故障的无人推力矢量飞机,设计了基于多观测器的反步容错控制。首先根据时标分离原则,将无人推力矢量飞机本体方程分为快、慢回路,考虑干扰和模型误差等不确定性,同时引入舵面故障和执行器故障,建立无人推力矢量飞机故障模型。然后针对快回路方程设计由自适应滑模观测器和高阶滑模观测器组成的级联观测器来实现补偿舵面故障及不确定性的状态估计;接着针对执行器卡死和损伤故障分别设计滑模观测器来实现故障辨识及故障参数估计;最后在状态估计和故障参数估计的基础上,针对快慢回路设计反步容错控制,最终实现包容不确定性、舵面故障和执行器故障的全局容错控制。大迎角机动仿真验证了本文所提方法能够较好地实现对无人推力矢量飞机的全局容错控制。容错控制器结构框图如图1所示。
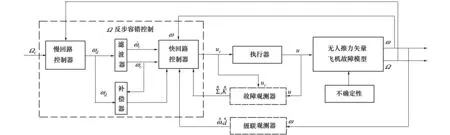
图1 容错控制器结构框图
1 问题描述
无人推力矢量飞机的非线性模型可由12个一阶微分方程描述[15]。根据时标分离法,将飞机本体方程分为快慢2个回路进行分析。快回路由ω=[pqr]T3个状态量组成,分别为滚转、俯仰和偏航角速度;慢回路由Ω=[αβμ]T3个状态量组成,分别为迎角、侧滑角和滚转角。慢回路和快回路方程可以描述为:
(1)
式中,x=[αβμpqr]T为系统状态;u=[δaδeδrδyδz]T,分别为副翼、升降舵、方向舵、侧向推力矢量和纵向推力矢量偏转角度;d为干扰和模型误差等产生的不确定性总和。
当飞机舵面发生故障时,表现为舵面原有的气动作用发生改变。以第i个舵面为例,则舵面故障可以描述为:
(2)

(3)
式中,U=diag[δa,δe,δr,δy,δz],r=[rarerrryrz]T。
当执行器发生故障时,表现为舵面发生异常偏转。常见的执行器故障主要有卡死、饱和、松浮及损伤。其中,饱和故障等效于舵面卡死在极限位置处,松浮故障等效于舵面卡死在零度位置处,二者均可视为卡死故障的特殊情况。因此将执行器故障分为卡死和损伤2大类进行分析。无故障时,执行器的动态方程可以描述为:
式中,ai≫0是执行器的自然频率,表示执行器执行舵面偏角指令非常快,即不考虑执行器的延时效应;则第i个招待器故障模型可以描述为:
(4)


δi=σikiδci+(1-σi)δi
(5)
考虑舵面故障,执行器故障以及外界干扰和模型误差产生的不确定性总和d,推力矢量飞机的故障模型可以描述为:
(6)
式中,R=diag[ra,re,rr,ry,rz],K=diag[ka,ke,kr,ky,kz],Σ=diag[σa,σe,σr,σy,σz],uc=[δcaδceδcrδcyδcz]T。
2 全局容错控制器设计
本节首先通过设计级联观测器实现补偿舵面故障和不确定性的状态估计,然后针对每个执行器设计滑模观测器实现故障辨识和故障参数估计,最后将状态估计和故障参数与反步法结合,实现包含舵面故障,执行器故障和不确定性的全局容错控制。
2.1 级联观测器设计
级联观测器由自适应滑模观测器和高阶滑模观测器组成,用于估计快回路状态和补偿不确定性d,同时引入不连续投影自适应律来实现对舵面故障的容错控制。
针对舵面故障模型(3)设计自适应滑模观测器如下:
(7)

(8)


不连续投影自适应律具有如下性质:



综上所述,不连续投影自适应律的性质二成立。
由(3)式和(7)式可得:
(9)


(10)

证明构造李亚普诺夫函数如下:
(11)
则:
(12)
将不连续投影自适应律(8)式代入得:
(13)
由完全平方不等式可得:
(14)
则:
(15)
当
(16)
2.2 执行器故障辨识
为了辨识执行器故障类型,估计故障参数,针对每个舵面分别设计卡死故障滑模观测器和损伤故障滑模观测器。
卡死故障滑模观测器表达式如下:
(17)

损伤故障滑模观测器的表达式如下:
(18)


(19)
构造李亚普诺夫函数:
(20)
则:
(21)

(22)

当第i个执行器发生损伤故障时,卡死故障滑模观测器误差微分方程为:
(23)

当第i个执行器发生损伤故障时,损伤故障滑模观测器误差微分方程为:
(24)
构造李亚普诺夫函数:
(25)
则:
(26)

综上所述,结论二成立。根据结论二,设定以下指标对卡死和损伤故障进行辨识。
(27)
式中,c1,c2,c3均为正数,分别表示比例,积分和微分的权重值;j=s,l。故障辨识机理如下:
(28)
(29)
2.3 反步容错控制
在级联观测器和执行器故障参数的基础上,针对快慢回路设计基于反步法[16]的容错控制,实现对执行器故障,舵面故障及不确定性的全局容错控制。
定义慢回路姿态角的跟踪误差为:
Ωe=Ω-Ωc
(30)
式中,Ωc=[αcβcμc]T为姿态角的期望指令信号,则:
(31)
考虑如下李亚普诺夫函数:
(32)
则:
(33)
设计虚拟控制信号如下:
(34)
式中,KΩ为待设计的正定对角矩阵。可得:
(35)
为避免“微分爆炸”现象,针对慢回路虚拟控制信号设计滤波器,结构图如图2所示。

图2 滤波器结构图
滤波器的状态空间表达式为:
(36)
(37)
(38)
定义快回路姿态角速度的跟踪误差为:
(39)
式中,ωc为快回路虚拟指令信号,则:
(40)
构造李亚普诺夫函数如下:
(41)
则:
(42)
设计控制信号如下:
(43)
式中,Kω为待设计的正定对角矩阵。可以得到:
(44)
3 仿真结果及分析
以无人推力矢量飞机动力学方程为被控对象,设计控制律为(34)式和(43)式,级联观测器为(7)式和(10)式,故障观测器为(17)式和(18)式,进行Matlab数字仿真。飞机的副翼δa、升降舵δe、方向舵δr、侧向推力矢量舵面δy和纵向推力矢量舵面δz的偏转角度限制量分别为:±20°,±25°,±30°,±15°,±15°。飞行仿真的进入条件为:飞行高度h=4 000 m,飞行速度v=150 m/s,发动机推力T=40 kN;输入指令信号ωc=[αcβcμc]T,如图2所示。
选取不确定性d=[dpdqdr]T,dp=dq=dr=10sin(2πt)°/s2;飞机故障信号为:t=2 s副翼舵面发生系数为80%的故障,t=3 s升降舵执行器发生损伤系数为60%的损伤故障;t=6.5s,方向舵执行器发生卡死故障。基于控制器设计要求(16)式,并经过多次调试,选取控制器主要参数如表1所示:
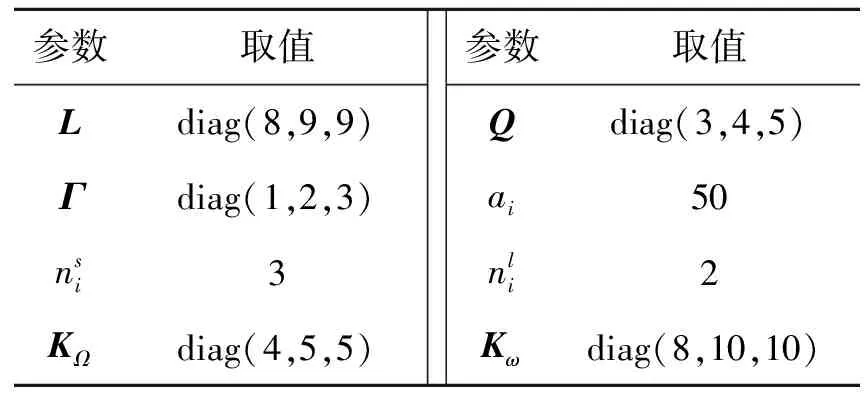
表1 控制器参数


图3 慢回路指令信号与跟踪过程

图4 容错控制器快回路跟踪过程
图3为采用容错控制器和一般控制器的慢回路指令信号与跟踪过程对比曲线,图4、图5为采用容错控制器和一般控制器的快回路跟踪曲线。可以看出,0~2 s存在不确定性d时,一般控制器的姿态角误差较大,不能实现对不确定性的抑制;2~10 s,副翼舵面发生故障,升降舵执行器和方向舵执行器时发生故障,一般控制器忽然发散,无法跟踪指令信号,不能实现容错控制。而本文所设计的容错控制器可以有效抑制不确定性,并当舵面及执行器发生故障时,能迅速补偿故障影响,完成机动指令。
图6、图7为采用容错控制器和一般控制器的uc=[δcaδceδcrδcvδcz]T与u=[δaδeδrδvδz]T的动态响应曲线。由仿真图可以看出,0~2 s,存在不确定性d时,一般控制器的舵面偏角发生不规则跳变;2~10 s,副翼舵面发生故障,升降舵执行器和方向舵执行器时发生故障,舵面偏角忽然发散,不能实现容错控制。而本文所设计的容错控制器可以有效抑制不确定性,实现舵面偏角在允许范围内的规则渐变。另外可以看出,当副翼及升降舵执行器发生故障时,推力矢量纵向偏角会重新配置做出补偿;当方向舵执行器发生故障时,推力矢量侧向偏角会重新配置做出补偿,最终实现容错控制。
图8为级联观测器误差曲线图。可以看出,仿真开始时,观测器误差迅速降低并保持在一个较低的水平;当舵面及执行器发生故障时,观测器误差发生轻微波动。图9分别为副翼和升降舵及方向舵执行器故障辨识曲线图,可以看出,t=2 s时,副翼发生故障系数为80%的故障;t=3 s时,升降舵执行器发生损伤系数为60%的损伤故障;t=6.5s时,方向舵执行器发生卡死故障。
仿真结果表明,本文所设计的级联观测能够实现对不确定性及舵面故障的有效补偿,故障观测器能够准确辨识执行器故障并估计故障参数,最终通过反步法实现包容不确定性,舵面故障和执行器故障的全局容错控制。另一方面验证了推力矢量对常规气动舵面的补偿作用。
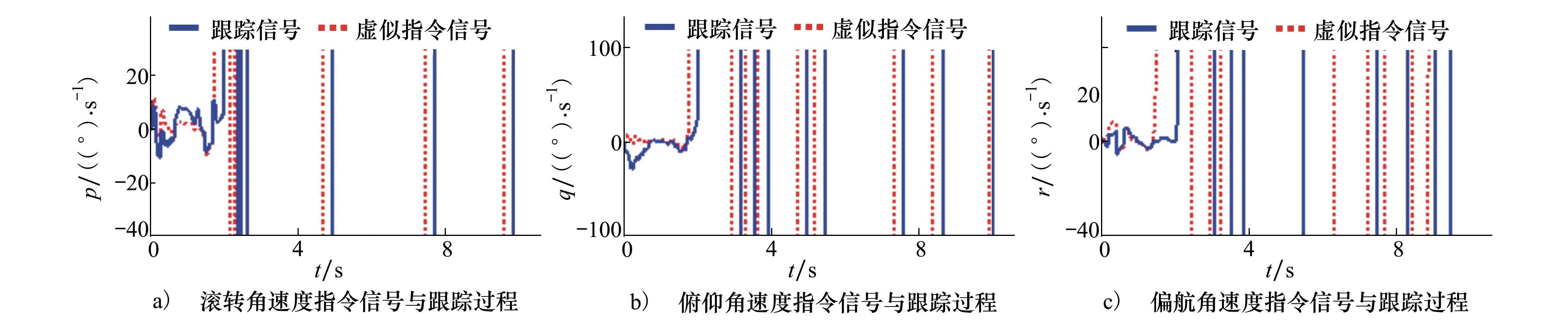
图5 一般控制器快回路跟踪过程
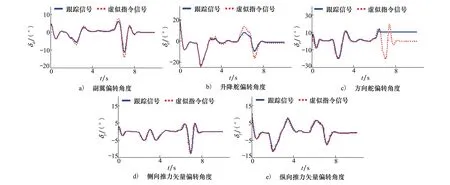
图6 容错控制器舵面偏转角度

图7 一般控制器舵面偏转角度

图8 级联观测器误差曲线图

图9 故障辨识曲线图
4 结 论
本文以无人推力矢量飞机为研究对象,考虑扰动及模型误差等不确定性的影响,针对舵面故障和多执行器故障设计基于滑模观测器的全局反步容错控制。级联观测器能够有效补偿不确定性及舵面故障,实现对快回路状态的准确估计;故障滑模观测器能够准确估计故障参数,实现故障辨识;反步容错控制结合状态估计和故障参数,实现对包含扰动及模型误差的不确定性,舵面故障和执行器故障的全局容错控制。大迎角机动仿真表明本文所设计控制器能够实现对无人推力矢量飞机的全局容错控制。
本文只是对无人推力矢量飞机容错控制的初步研究,今后将进一步改进包括传感器故障,结构故障、执行器故障及控制器延时效应的无人推力矢量飞机故障模型[17],设计包容多种故障的容错控制。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
新技术新工艺(2022年3期)2022-04-02
兵器装备工程学报(2021年12期)2022-01-11
E动时尚·科学工程技术(2019年6期)2019-09-10
制造技术与机床(2019年8期)2019-09-03
绿色科技(2019年10期)2019-06-17
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年1期)2018-03-03
制造技术与机床(2017年9期)2017-11-27