基于相位一致梯度算法的无人机影像分类
2018-11-23 07:35许捍卫金文韬
地理空间信息 2018年11期
王 巍,许捍卫,金文韬,丁 壮
(1.河海大学 地球科学与工程学院,江苏 南京 211100)
分水岭算法[1]分割的准确性很大程度上由梯度检测算子决定,而Sobel、Prewitt等常见的检测算子都存在受噪声影响大,边缘定位易出现偏移的问题。为了克服这些问题,产生了大量改进的线性滤波边缘检测算子,如Log算子[2]和Canny算子[3]等。本文采用基于相位一致梯度的分水岭算法,利用Log Gabor小波计算相位一致梯度,并对无人机影像进行分割。
1 相位一致的概念
Morrone等在研究马赫带现象(在观察明暗变化的边界时,在亮线条中会看到一条更亮的光带,而在暗线条中会看到一条更暗的线条)时发现,人类对图像特征的感知与图像的傅里叶谐波相位叠合的最大处是一致的,因此他指出人类视觉系统对图像的识别与相位一致[4]是符合的,即可用相位一致对图像特征进行度量。相位一致能对屋脊形、阶跃形等图像特征进行检测,已在医学图像分割,人脸自动识别等领域得到广泛应用。
2 利用Log Gabor滤波计算相位一致
计算相位一致时,一维信号的局部能量是由相位偏离差的余弦函数所决定的,可能存在因余弦函数峰值定位不准而引起的误差,因此利用Kovesi改进的方法计算相位一致[5]:

式中,W(x)为频带展宽;T为噪声估计;ε为防止分母为0而引入的一个极小值量;当An( x) (Δ Φ(x)-T )为正值时,取其本身,为负值时,则取0;ΔΦ(x)为相位偏移函数。
改进的相位一致算法考虑了频带展宽和噪声补偿,目的是通过频带展宽,提高信号相位一致的显著性;只有当X相位偏移量大于T时才进行相位一致。

与原有的余弦函数相比,相位偏移函数具有更加明显的峰值,能有效避免由峰值定位不准而引起的误差。
局部能量最初是由谐波变换得到,本文采用Log Gabor小波[6]提取局部能量。Log Gabor小波是一个实部和虚部正交的复小波,能在偶对称滤波器保持0直流分量时任意构造不同带宽的滤波器。Log Gabor小波在线性频率尺度上的传递函数可表示为:

式中,w0为滤波器的中心频率;k/w0为保持滤波器形状而设定的一个常量。

这一尺度上的幅度和相位可分别表示为:

频带展宽则可表示为:
式中,N为滤波器的尺寸数目;Amax(x)为滤波器最大的响应幅度;c为截止频率;g为频带展宽的增益因子。
因此,二维信号的相位一致计算公式为:

式中,o为滤波器方向;n为滤波器尺度。
本文以Matlab为实验平台进行影像相位一致提取,具体步骤为:
1)构造一组2倍频的Log Gabor小波滤波器,采用 6 个方向(0,π/6,π/3,π/2,2π/3,5π/6)和 5 个尺度(最小带宽为3,相邻尺度间比值为2),共生成30个不同尺度和方向的滤波器。
2)按照式(5)、式(6)计算各方向上的幅度和相位,在实验中T取值为3.00。
3)根据式(9)计算各点各方向的相位一致值,经过多次试验确定,c取值为0.40,g取值为10.00,ε取值为0.01。将所有相位一致值进行累加,得到相位一致梯度,用于分水岭分割。
3 自动标记和梯度重建
本文通过不同尺寸和方向Log Gabor滤波器的叠加,获取了影像的相位一致梯度,但实验发现在相位一致梯度上直接进行分水岭分割仍存在过度分割现象,这是由于在相位一致梯度图像上仍存在许多伪极小值点,而将这些伪极小值点作为种子点参与分割将导致过度分割。因此,本文采用扩展最小变换和对图像进行基于开闭的重建来对相位一致梯度图像进行处理。
扩展最小变换[7]是形态学上的一个阈值算子,能将大多数的无关区域标记为0。梯度图像G的扩展最小变换计算公式为:

式中,h为高度阈值;E为输出的二值图像。
在8连通条件下将高度小于h的像素点标记为1,其他像素点标记为0。获得标记图像后,采用强制最小过程的方法修改梯度图像。完成梯度重建后,可采用分水岭分割算法对无人机影像进行分割,完成面向对象的无人机影像分割。
4 分割结果分析与比较
完成基于相位一致梯度的分水岭分割后,本文将无人机影像的分割结果与传统的易康eCognition分割算法进行对比分析,采用ESP算法确定影像的最佳分割尺度。
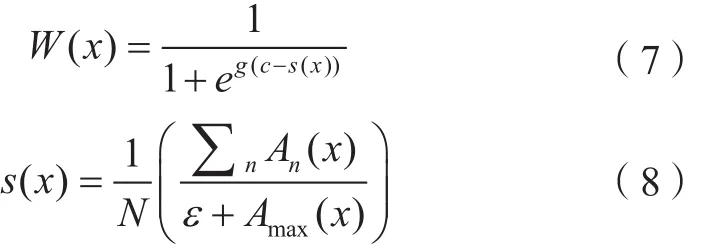
本文以1为步长、0为起始、50为终止的分割尺度对影像进行最佳分割尺度的迭代计算,并将生成的计算法结果导入ESP图表运算器中,得到的ROC-LV曲线图。通过计算得到3个可能的影像最佳分割尺度:21、31和43。将结果与基于相位一致梯度的分水岭分割算法的结果进行对比,如图1~4所示,可以看出,当尺度为21、31时,相较于基于相位一致梯度的分水岭分割,其结果过于破碎,存在一个地物被分割成多个对象的现象,将会导致后续分类时无法准确利用地物的形状信息;当尺度为43时,影像将某些不同的地物分割在一个斑块中,同样会影响后续土地利用与土地覆盖信息的精度。因此,本文以基于相位一致梯度的分水岭分割算法的结果为标准,进行土地利用与土地覆盖信息提取的工作。
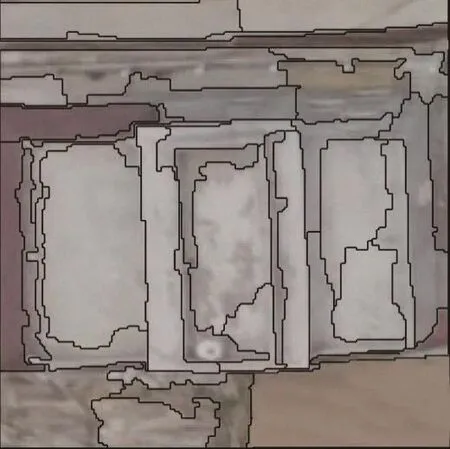
图1 尺度为21的分割结果
图2 尺度为31的分割结果
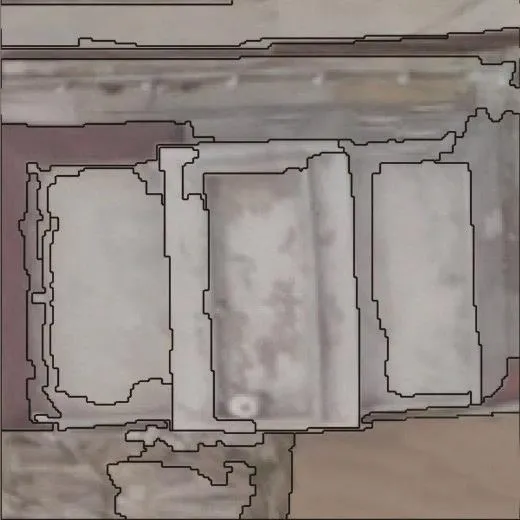
图3 尺度为43的分割结果
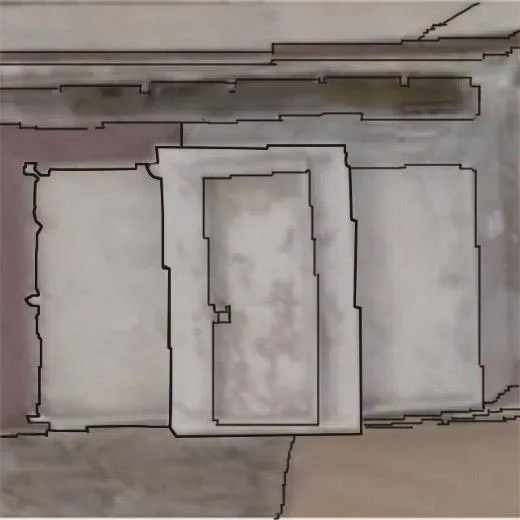
图4 基于相位一致梯度的分水岭分割结果
5 面向对象的信息提取
本文参考全国第二次土地调查[8]使用的土地利用/土地覆盖分类系统,结合研究区内土地的资源和利用属性,将影像划分为耕地、林地、建筑用地(简称建筑)、交通运输用地(简称道路)、水域及水利设施用地(包括以坑塘水面为主体的人工水利设施和以海面为主体的自然水体)和裸地6类。
确立分类体系后,分类的具体流程为:①首先利用植被指数提取影像中的植被地物,再利用纹理等特征将其细分为林地和耕地两小类;②在非植被中,利用亮度、位置等特征提取坑塘水面水体与海面水体;③利用红、蓝顶建筑在红蓝波段具有高反射率的特点进行提取,并利用最邻近分类器分离裸土与不透水面(建筑与道路);④利用形状指数分离道路和灰顶建筑,并将灰顶建筑与红、蓝顶建筑进行合并。
为了检验精度,将样本的分类结果与影像进行对比,结果如表1所示,可以看出,实验区影像土地利用类型分类的总体精度达到90.11%,Kappa系数为0.88,说明分类的总体精度较好,提取的土地利用信息可信度较高,能为土地利用信息的可视化、国土资源部门土地开发与利用、地理国情监测提供有效帮助。信息提取结果如图5所示。
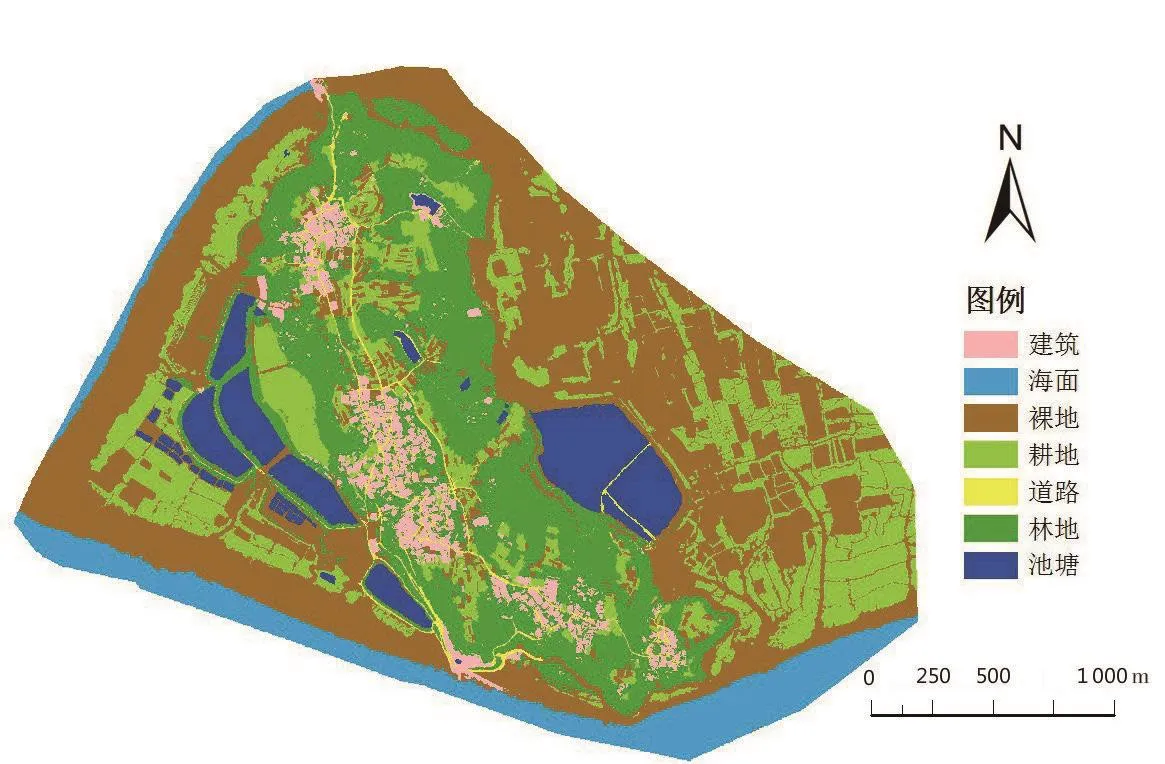
图5 土地利用信息提取效果图

表1 精度检验混淆矩阵
6 结 语
本文以浙江省台州市玉环县境内某地为研究区,对无人机影像的分割算法以及面向对象的土地利用信息提取进行了实验研究。结果表明,利用无人机遥感观测平台获取的高分辨率影像,通过快速拼接流程,在利用基于相位一致梯度的分水岭分割算法分割影像的基础上,采用光谱、纹理、位置、距离等特征对土地利用/土地覆盖信息进行提取,能便捷地获取研究区的土地利用/土地覆盖信息,为国土资源普查、土地资源管理、灾害应急响应和土地利用决策提供有效支持。本文采用基于相位一致梯度的分水岭分割算法是对传统分水岭算法的改进,对弱响应边缘有着良好的分割效果,其分割结果能为后续土地利用信息提取提供支持。
猜你喜欢
数学物理学报(2021年6期)2021-12-21
应用数学(2020年2期)2020-06-24
兽医导刊(2019年1期)2019-02-21
数学年刊A辑(中文版)(2018年2期)2019-01-08
自然资源情报(2017年4期)2017-11-26
中国老区建设(2016年8期)2016-02-28
河南科技(2014年3期)2014-02-27
城市道桥与防洪(2014年1期)2014-02-27
河南水利与南水北调(2013年4期)2013-08-15
河北医科大学学报(2011年6期)2011-03-25