基于UKF的分布式驱动电动汽车轮胎侧向力估计
2018-11-24 02:28张志勇张淑芝黄彩霞
西华大学学报(自然科学版) 2018年6期
张志勇, 张淑芝, 黄彩霞, 唐 磊
(1.工程车辆安全性设计与可靠性技术湖南省重点实验室, 湖南 长沙410114;2.长沙理工大学汽车与机械工程学院, 湖南 长沙410114;3.湖南大学汽车车身先进设计制造国家重点实验室, 湖南 长沙410082)
轮胎力是外界对车辆系统施加作用的重要途径,直接影响车辆的舒适性、动力性和稳定性。其中,轮胎侧向力是影响车辆横向稳定性的关键因素,对车辆的操纵稳定性具有重要意义[1]。然而,轮胎力受行驶工况、垂直载荷、轮胎压力、环境特性、温度、磨损等诸多因素的影响,其随机性给轮胎力的准确检测带来了挑战[2]。虽然轮胎力可以用特定的传感器进行检测,但这种方法需要复杂的安装,而且这些传感器非常昂贵[3]。鉴于以上原因,人们逐渐采用估计方法进行轮胎力的估计。
目前用于轮胎力估计的方法主要包括神经网络估计法[4]、滑膜观测器估计法[5]、卡尔曼滤波估计法[6-7]等。文献[4]将神经网络加入估计器中,以补偿摩擦模型不确定性对估计精度的影响,取得了一定的效果,但该方法的映射关系难以确定,估计精度的稳定性差,收敛速度慢,难以用于实际。文献[5]设计了基于滑膜观测器的轮胎力级联估计方法,该方法计算量小、实时性好,但观测器中的滑膜增益和反馈增益需要进行大量实验,且不能适应所有工况。文献[6]以魔术公式轮胎模型为基础,基于EKF对轮胎侧向力进行了估计,但该方法使用复杂的轮胎模型,计算负荷大,实时性差。文献[7]对比了UKF和EKF两种轮胎力估计方法,用实验数据证明UKF在收敛速率和跟踪性能上优于EKF。
分布式驱动电动汽车具有结构紧凑、动力传动链短、控制响应快、车轮转矩分配灵活等多方面优势,已成为电动汽车的重要发展方向[8-10]。分布式驱动电动汽车在不增加传感器的情况下,可通过驱动电机准确获得车轮转矩和转速,信息的感知范围相对于传统车辆有较大程度的拓展,为轮胎力估计提供了更大的应用空间[8]。另一方面,分布式驱动电动汽车4个车轮转矩可独立控制,给车辆横向动力学控制带来了更大的自由度。为了充分利用分布式驱动特点在横向动力学稳定性控制上的优势,当前常用的轮胎侧向力估计方法只能获得同轴轮胎侧向合力[2, 5,11],因此具有一定的局限性,如何获得每个车轮的横向力是亟待解决的关键问题。
本文利用分布式驱动电动汽车可直接计算轮胎纵向力的特点,以轮胎纵向力作为输入量,首先基于UKF估计同轴轮胎侧向合力,然后利用修正公式计算每个轮胎的侧向力。通过与直接计算法对比,验证了所提出方法的优越性。同时,分析了具有参数不确定性时的估计精度鲁棒性。
1 车辆动力学模型
1.1 三自由度动力学模型
如图1所示的车辆动力学模型包括纵向、侧向、横摆以及3个自由度,用于描述易测量状态和待估计状态的内在联系,并实现状态预测。

图1 三自由度车辆动力学模型
纵向动力学方程:
max=(Fxfl+Fxfr)cosδ-(Fyfl+Fyfr)sinδ+Fxrl+Fxrr
(1)
横向动力学方程:
may=(Fxfl+Fxfr)sinδ+(Fyfl+Fyfr)cosδ+Fyrl+Fyrr
(2)
横摆动力学方程:

(Fyfl+Fyfr)cosδ]-b(Fyrl+Fyrr)
(3)
式中:m为整车质量;ax为纵向加速度;vx为纵向速度;ay为侧向加速度;vy为侧向速度;γ为横摆角速度;Fxij、Fyij分别为轮胎纵向力、侧向力,其中i=f,r,分别表示前和后;j=l,r,分别表示左和右;Iz为整车绕z轴的转动惯量;a和b分别为质心到前、后轴的距离;tw为轮距;δ为前轮转角。
1.2 轮胎纵向力计算
分布式电动汽车的4个车轮直接由电机驱动,转矩和转速容易测量,因此可利用车轮动力学模型计算轮胎纵向力。车轮动力学模型为
(4)
其中电机转矩Tij计算方法如下:
Tij=KTIij
(5)
式中:KT为电机转矩常数;Iij为电机线电流。
在已知车轮转矩和旋转角速度的前提下,轮胎纵向力可表示为
(6)
2 轮胎侧向力的直接计算法
2.1 轮胎侧偏刚度估计
二自由度车辆动力学模型可表示为:
may=Fyf+Fyr
(7)
(8)
式中,Fyf和Fyr分别是前后轴的侧向合力。
由式(4)和(5)可得到前后轴的侧向合力
(9)
(10)
另外,前后轴的侧向合力也可表示为[12]:
(11)
(12)
由式(6)-(9)可得前后轴轮胎的侧偏刚度为:
(13)
(14)
2.2 轮胎侧向力计算
根据计算得到的轮胎侧偏刚度,轮胎的侧向力可通过下式计算:
Fyij=Cαjαij
(15)
式中,αij为轮胎的侧偏角,计算方法如下:
(16)
(17)
由轮胎力的直接计算法可知,该方法基于二自由度车辆动力学模型计算轮胎的线性侧偏刚度,且认为左右侧轮胎的侧偏刚度相等,这些简化会影响极限工况下的非线性轮胎侧向力估计精度。
3 基于UKF的轮胎侧向力估计
UKF 是卡尔曼滤波框架下的一种滤波方法,它利用相似分布原理,构造出与原分布均值和协方差相同的Sigma 点集,并将其引入非线性系统进行无迹变换[13],通过求变换点的统计量得到估计变量,其算法如下:
1) 设定初值
(18)
(19)
2) 建立变换点集
利用 UT 变换,得到当前时刻状态的Sigma 点集{χi(k|k)}(i=0,1,…,2n)。
(20)
权值ωm、ωc定义:
(21)
(22)
(23)
3) 时间更新
(24)
(25)
(26)
(27)
(28)
4) 量测更新
(29)
(30)
(31)
(32)
(33)
式中:λ=α2(n+κ)-n。α、β和κ的值分别取1、2、0;n为x的维数。其他符号的含义详见参考文献[14]。
分布式驱动电动汽车的三自由度车辆动力学模型,通过非线性状态空间方程描述,包括状态方程和量测方程,其离散形式为:
x(k+1)=f(x(k),u(k))+w(k)
(34)
z(k+1)=h(x(k+1),u(k+1))+v(k+1)
(35)
式中:x为系统状态变量;f为非线性状态更新函数;w为过程噪声;z为测量变量;h为测量函数;u为系统输入;v为观测噪声。
由于分布式驱动电动汽车的4个车轮直接由电机驱动,转矩和转速容易测量,可利用车轮动力学模型直接计算轮胎纵向力。因此,本文利用这一特点,将轮胎纵向力作为输入量。
由三自由度模型和轮胎侧向力计算公式,系统状态变量定义为
x=[vx,vy,γ,ax,ay,Fyf,Fyr]T
(36)
测量变量定义为
z=[γ,ax,ay]T
(37)
系统输入定义为
u=[δ,ax,ay,γ,Fxij]T
(38)
由于UKF估计的轮胎侧向力为前后轴侧向和力,无法直接获得每个轮胎的侧向力。为了得到每个轮胎的侧向力,本文假设轮胎的侧向力和垂直载荷呈线性比例关系,即同轴左右轮胎的垂直载荷与侧向力满足如下关系[10]:
Fyfl/Fzfl=Fyfr/Fzfr
(39)
Fyrl/Fzrl=Fyrr/Fzrr
(40)
式中,Fzij为4个轮胎的垂直载荷。
在此基础上,进一步通过增加一个和侧向加速度有关的修正项表征侧向力和垂向载荷之间的非线性关系[10]:
(41)
(42)
式中,λ1和λ2分别为前后轴侧向加速度反映垂直载荷变化的修正权重因子,需要根据估计精度进行调整;轮胎垂直载荷计算方法如下:
(43)
(44)
式中,hg为车辆质心高度。
4 估计精度分析
为了验证本文提出的基于UKF的轮胎侧向力估计方法,在分布式驱动电动汽车轮胎侧向力估计方面的效果,基于CarSim和MATLAB/ Simulink进行轮胎侧向力估计的联合仿真,并与直接计算法进行对比。仿真过程中,方向盘转角为鱼钩输入,前轮转角如图2所示。车辆参数如下:整车质量m=1 230 kg,质心到前轴的距离a=1.1 m,质心到后轴的距离b=1.3 m,轮距tw=1.4 m,轮胎滚动半径Rw=0.33 m,整车绕Z轴的转动贯量Iz=4 607 kgm2,轮胎转动惯量J=0.99 kgm2,质心高度hg=0.54 m。另外,车速为80 km/h,路面附着系数μ为0.85,采样周期Ts=0.01 s。

图2 前轮转角
4.1 名义参数下的估计精度分析
UKF、直接计算法和CarSim输出的轮胎侧向力对比如图3所示,其中以CarSim值作为实际值,用于检验UKF和直接计算法的估计效果。由图可知,UKF能准确估计出轮胎侧向力,且明显比直接计算法精度高。特别是在2~6 s时,直接计算法产生了较大估计误差,但UKF估计的轮胎侧向力仍然保持较高的估计精度。仔细观察直接计算法估计的轮胎侧向力,可发现右侧轮胎侧向力在3~6 s时的误差最大,误差绝对值竟达4 kN左右。如果进一步对比同轴左右侧轮胎的侧向力,可发现两者大致相同,这是因为二自由车辆动力学模型假设前后轴轮胎的侧偏刚度分别相同(如式(13)和(14)所示)。由此可知,直接计算无法准确估计轮胎侧向力。

图3 轮胎侧向力估计精度对比
为了进行估计误差的定量分析,对比两种方法的归一化误差百分比的绝对均值(Mean)和标准差(Std),其中归一化误差百分比定义为[2]
(45)
式中:Fe为估计的力;Fcarsim为CarSim输出的力。
表1为UKF和直接法估计误差的定量分析结果。由表可知,基于UKF的轮胎侧向力估计误差很小,而直接计算法的估计误差较大,进一步证明UKF对轮胎侧向力的估计效果更佳。
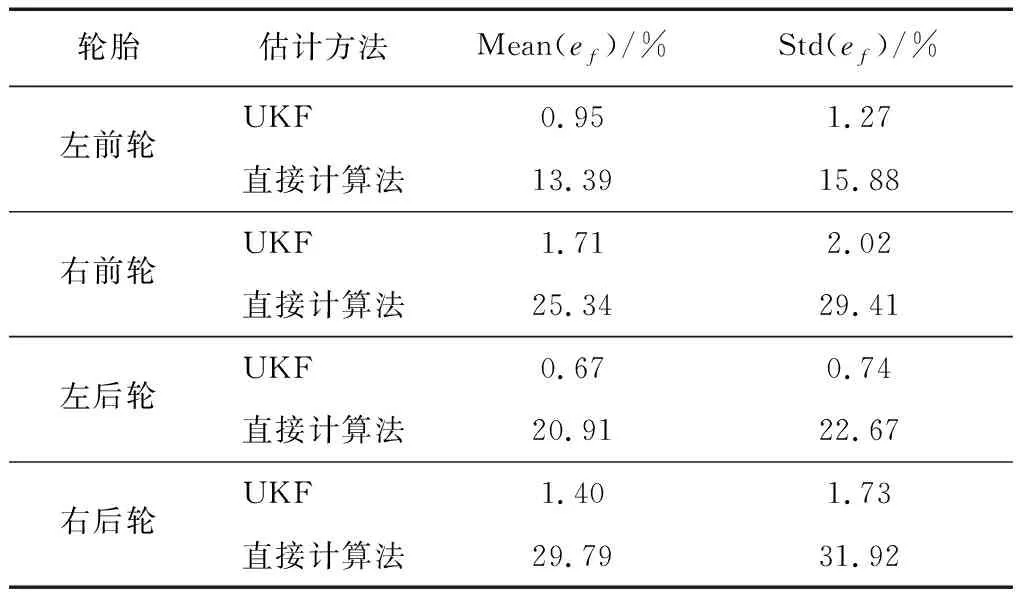
表1 状态估计误差分析
4.2 具有质量参数不确定性的估计精度分析
众所周知,车辆质量与乘员的个数、重量等有关,因此具有较强的不确定性。为了分析UKF估计方法的鲁棒性,分别对比整车质量为名义值、增加10%和减少10%条件下的估计精度,如图4所示。由图可知,具有质量参数不确定性时,UKF对于轮胎侧向力的估计精度有所降低,表现为质量增加为过度估计,而质量减少时为不足估计。如果整车质量的不确定性更强,估计精度下降更严重。

图4 改变整车质量时UKF轮胎侧向力估计精度对比
4.3 具有转动惯量参数不确定性的估计精度分析
整车质量及质量的分布会影响车辆绕Z轴的转动惯量,因此该参数同样具有不确定性。转动惯量为名义值、增加10%和减少10%条件下的估计精度对比如图5所示。由图可知,转动惯量的不确定性对UKF的估计精度影响较小。

图5 改变转动惯量时UKF轮胎侧向力估计精度对比
表2为名义参数和具有参数不确定性时的UKF估计误差定量分析。由表可知,基于UKF的轮胎侧向力估计误差基本在5%以内,说明在给定的参数不确定性条件下的估计误差很小,UKF对参数不确定性具有一定的鲁棒性。

表2 UKF误差分析
4.4 测量值噪声对估计精度的影响分析
在前述仿真中,测量噪声协方差矩阵初值设置为R=eye(3)×1,反映了当前测量噪声的统计特性,因此能确保有较高的估计精度。鉴于传感器零点漂移是一种常见的测量噪声形式,图6对比了测量值分别提高10%和20%时的侧向轮胎力估计精度。由图可知,当测量值出现漂移,即测量噪声协方差矩阵与测量噪声的统计特性不匹配时,估计精度呈现明显降低,且噪声越大,估计误差也越大。

图6 测量值噪声对估计精度的影响
5 结论
本文基于UKF方法估计分布式驱动电动汽车的轮胎侧向力,得出如下结论:
1) 由于直接计算法假设同轴两侧轮胎的偏刚度相等,且为线性刚度,在极限工况下对轮胎侧向力估计精度较低。基于UKF的分布式驱动电动汽车轮胎侧向力估计精度较高,且对参数不确定性具有一定的鲁棒性。
2) 转动惯量的参数不确定性对UKF的估计精度影响较小,但质量的参数不确定性对UKF的估计精度影响较大,后续应开展提高估计精度鲁棒性的措施研究。
3) 在恒定的测量噪声协方差矩阵条件下,测量噪声不确定性对估计精度影响较大,因此有必要开展自适应UKF算法研究,提高具有测量值噪声不确定性时的估计精度。
猜你喜欢
法律方法(2022年2期)2022-10-20
北京航空航天大学学报(2021年4期)2021-11-24
英语文摘(2019年6期)2019-09-18
中国外汇(2019年7期)2019-07-13
童话世界(2019年14期)2019-06-25
玩具世界(2019年6期)2019-05-21
知识就是力量(2018年3期)2018-03-08
幼儿教育·父母孩子版(2017年12期)2018-02-28
科普童话·神秘大侦探(2017年3期)2017-03-16
通信电源技术(2016年1期)2016-04-16