基于PLC的液压支架电液控制系统的研究
2018-11-28 08:41王洋
机械管理开发 2018年11期
王 洋
(阳煤集团二矿调度室机掘二队, 山西 阳泉 045000)
引言
煤炭作为国民经济发展的基础性能源资源,被广泛应用于国民经济的各个行业,并将在未来很长的一段时间内继续维持着核心能源资源的地位。为了满足国民经济发展对煤炭资源的巨大需求,各煤炭生产企业不断投入新型的煤炭综采和支护设备,用于满足煤矿井下高效的生产要求。矿用液压支架作为煤炭工作面的支护设备,分布于整个综采工作面上,对整个煤炭的综采过程实施有效的防护,并能与采煤机及刮板输送机进行联动控制[1]。但目前多数井下液压支架控制精度差、动作滞后、联动性能差,极大地影响了煤矿井下的综采作业效率,因此如何优化井下液压支架的控制系统,实现井下综采面的自动化生产,对煤炭生产企业具有十分重大的意义。
1 液压支架电液控制系统的单体结构设计
在煤矿井下综采工作面中分布着由多个单体液压支架组成的综采工作面液压支架电液控制系统,在该控制系统中各单体液压支架控制系统完全一致,单个液压支架电液控制系统的整体结构如图1所示。由图1可知,支架单体的电液控制系统主要包括控制模块、显示模块、信息采集模块及电源模块等,其中控制模块主要用于发生控制指令,信息采集模块主要用于对液压支架的运行状态信息进行收集,以上两个模块为电源控制系统的核心单元。在信息模块中,将压力传感器设置在液压支架立柱的测压孔处,用于收集立柱上液压油缸内的工作压力,在液压支架推移油缸的内部的上端设置位移传感器,用于测量液压支架上推移油缸的位移情况。信息采集模块将采集到的液压支架的运行状态信号传递给控制模块,同时系统利用设置在采煤机制定位置上的红外发射器设备及设置在液压支架控制设备下的红外接收装置来对采煤机和液压支架的相对位置进行判断,从而实现跟机的自动化控制[2]。
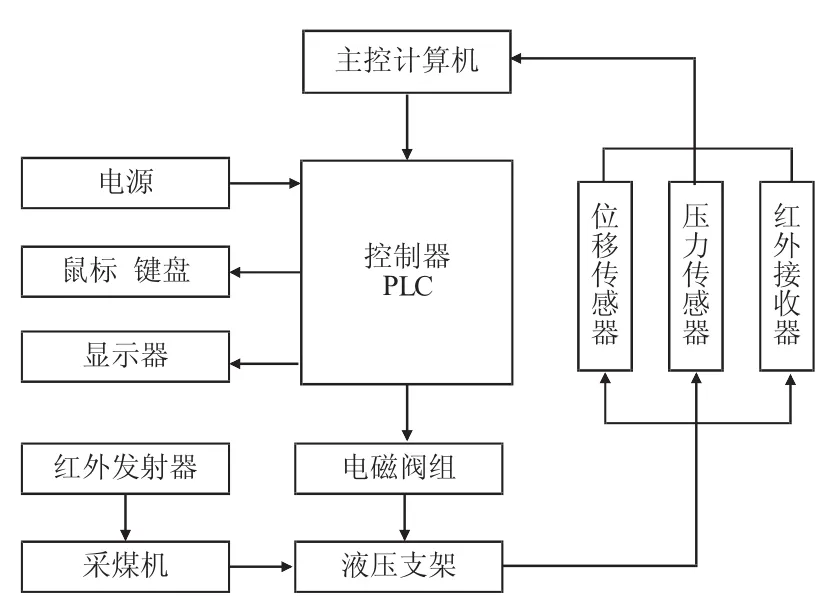
图1 电液控制系统的单体结构示意图
综采面的电液控制系统主要由12组功能控制阀组成,在电磁先导阀的控制下,实现对各液压支架单体液压缸动作的控制,实现统一的控制与动作。该控制系统利用数据信息采集模块收集到的数字信号作为对液压缸动作的控制基础信息,实现对液压支架动作的精确控制。为确保该控制系统运动状态的稳定性和连续性,其电源模块采用了每组5个控制器的双路直流电源供电系统,电液控制系统的液压原理如下页图2所示。在该控制系统中,液压支架液压缸的活塞杆端部的载荷在不同工况下是不稳定的,液压缸工作时的最大载荷不能超过35 MPa。
2 液压支架电液控制系统硬件结构设计
液压支架电液控制系统的硬件结构如下页图3所示,液压支架的电液控制系统在单体支架控制系统的基础上新增了电磁驱动装置,每台液压支架的控制系统由控制模块、显示模块、信息采集模块及电源模块及电磁驱动模块组成[3]。
液压支架电液控制系统的控制核心是可编程控制器单元,不同液压支架单体之间的数据传输与交换是采用CAN总线结构来实现的。当控制器将数据采集模块采集到的数据信息传输到上位机后,上位机根据程序命令及电流信号实现对电磁先导阀的开口状态来控制主阀的开关,从而实现对液压支架控制油缸的控制,从而达到对支架单体、组成控制及各支架单体单元的联动控制。在对液压支架群组实现控制的过程中,系统利用数据采集模块机CAN总线系统实现对整个控制过程的闭环的控制。根据实际生产时的工作经验,该液压控制系统在工作的过程中,液压支架的动作时间、动作快慢及动作量的大小均与采煤机的工作状态有关,也就是采煤机的工作位置决定着液压支架的工作状态。同理采煤机在运动时的牵引速度也直接决定着液压支架前进时的推进速度,而液压支架的支护方式也决定了液压支架在移动时的速度。为了满足对液压支架快速支护、快速移动、快速收撤的要求,该支护方式具有顶板暴露时间短、梁端距小、操作工序少、运行速度快的优点。
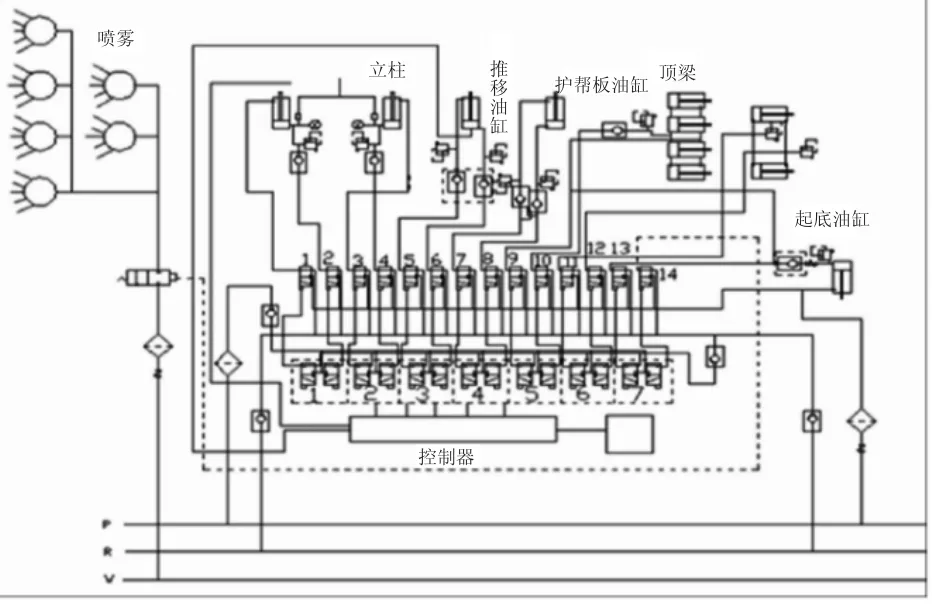
图2 电液控制系统的液压原理图
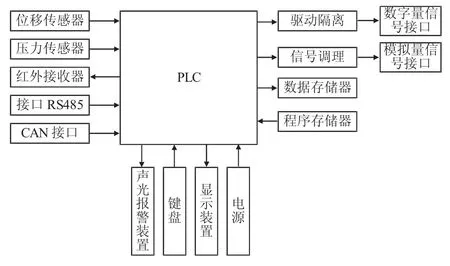
图3 电液控制系统硬件结构示意图
3 液压支架顺序联动软件系统设计
液压支架的单个支架的顺序联动需要在控制系统的作用下自动进行,根据实际生产需求,要求联动在10 s内完成连续动作。液压支架的单架顺序联动主要取决于能否在规定的时间内完成规定的动作[4]。在该控制方案中分别选择需要被控制的支架后,支架自动进入自控模式。当按下启动控制系统的下降移动联合动作控制按钮时,系统开始计,控制器开始执行控制动作,同时给各需要动作的液压支架一个预动作信号,延时2 s后关闭提醒。此时降柱电磁阀打开,液压支架的液压缸开始下降,此时,设置在液压支架上的传感器开始对液压支架的位移情况和传感器设备开始采集信号,液压支架的活塞杆开始下降。当液压支架下降到达指定位置时,位于降柱上的电磁阀闭合,此时系统控制打开控制液压支架移架的电磁阀,当液压支架的位移量达到系统设定值时,移架电磁换向阀闭合,此时控制液压支架上升的电磁换向阀打开,控制液压支架缓慢上升,直到达到系统的设定值,从而完成整个降移升循环控制过程。液压支架顺序联动控制流程如图4所示。
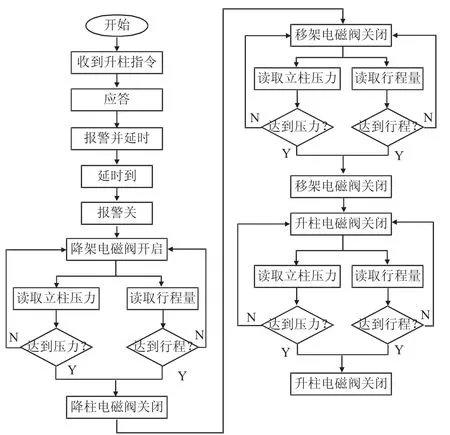
图4 液压支架顺序联动控制流程
4 结语
基于PLC的液压支架电液控制系统的应用能够大幅提高液压支架联合运动控制的精确性和自动化程度,降低液压支架状态转换时间,极大地提高了液压支架组的工作效率和工作可靠性,为确保井下综采区的安全生产提供了保障。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年1期)2022-02-16
河北画报(2021年2期)2021-05-25
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
重型机械(2020年2期)2020-07-24
煤矿机电(2019年6期)2020-01-13
电子技术与软件工程(2019年15期)2019-12-03
制造技术与机床(2017年5期)2018-01-19
专用汽车(2016年4期)2016-03-01