fMRI扫描噪声有源控制系统的次级通道建模
2018-12-01 05:34刘晓静赵超巨磊徐俊成蒋瑜
磁共振成像 2018年9期
刘晓静,赵超,巨磊,徐俊成,蒋瑜
在功能磁共振成像(functional magnetic resonance imaging,fMRI)扫描过程中,梯度电流会发生快速切换,在切换过程中梯度线圈受到主磁场施加的洛伦兹力的作用,使得线圈受力产生振动,从而产生很强的声音,这是磁共振噪声产生的主要原因。
较强的噪声会给磁共振扫描带来一些弊端,比如对于人类来说,接近120 dB的磁共振强噪声进入耳朵,会使人感觉到疼痛。磁共振噪声除了阻碍被试和操作员之间的交流外,还可能会给被试带来一些其他的影响,例如噪声会使得患者不适和焦虑的程度增大[1-3],尤其当患有幽闭恐怖症的患者躺在一个狭窄磁共振成像系统的闭合圆筒内时,其焦虑程度会显著增大[4]。此外Tischler等[5]的研究结果表明,71%的被试表示在扫描过程中会出现焦虑的症状。噪声还会带来暂时性失聪[6]、刺激人体内神经及肌肉组织[7]、潜在的永久性听觉损伤等危害[8],Brummett等[9]报道指出43%的患者,在没有耳朵保护或保护不当的情况下,他们的听力阈值会暂时改变。高强度的噪声会导致特定频率的永久阈值漂移(即永久性的听力损失)。另外,在脑功能听觉fMRI实验中,扫描噪声会掩盖刺激信号,同时噪声可能会提高听觉皮层脑活动的基线水平,降低与功能范式相关的脑激活程度[10],进而干扰fMRI实验的结果。梯度噪声还会对人脑听觉、运动和视觉皮质产生影响,噪声会使得总运动激活增加,相对于视觉刺激。并且当受试者暴露于高强度的噪声环境下,相应的(视觉)皮质活动显著减少[11-12]。Zhang等[13]研究结果显示,在fMRI采集过程中,产生的梯度噪声干扰了视觉皮层中的神经行为和BOLD信号。Yakunina等[14]研究表明,扫描背景噪声不仅影响了听觉脑区域,还影响注意力和感觉等网络。在实验中,扫描噪声还会干扰其他脑区的激活,从而使得图像包含一些虚假的激活成分[15-16],因此对磁共振扫描噪声的控制具有非常重要的意义。
传统的磁共振噪声控制方法主要是采用无源降噪技术,比如在扫描过程中,被试戴上海绵和耳塞等部件,这可以降低部分噪声,但是这种被动降噪技术所使用的降噪设备一般体积都比较大,且对低频噪声降噪效果较差[17]。考虑到磁共振成像(magnetic resonance imaging,MRI)系统的空间有限,无法使用尺寸较大的被动式装置,因此为了解决这个难题,笔者将采用有源噪声控制(active noise control,ANC)技术来控制噪声。与传统的无源降噪方法相比,ANC技术能够对低频噪声起到较好的抑制作用。另外ANC技术在声纳、雷达、电信、生物工程学、声学以及密码学等领域的应用也非常广泛[18]。相对被动降噪装置而言,有源降噪装置体积较小,在磁共振成像实验中,可以同时结合无源与有源两种降噪方法,更好地抑制被试所接收到的噪声强度。
ANC技术利用声波的干涉原理实现主动降噪[19]。如图1所示,在腔体的一端放置一个扬声器来播放初级噪声,在其附近放置一个麦克风采集初级噪声源,通过控制器对采集的初级噪声进行处理并产生一个反噪声,送入在腔体另一端放置的扬声器进行播放,使得原噪声与反噪声(与原噪声幅值相同、相位相反)相互抵消,以降低声场中的声能量,从而达到主动降噪的目的。
在进行ANC系统设计时,次级通道(控制器至误差麦克风之间的通道)的物理特性(通道的相位、幅值信息)将直接影响到降噪的效果,因此在进行噪声控制之前,我们必须准确获取次级通道的传递函数。笔者将介绍一种基于NI USB-7856R的附加高斯白噪声次级通道离线建模方法,此方法能够用于建立不同环境下的次级通道模型,因此可以在大脑听觉功能磁共振成像实验过程中,利用所获取的次级通道传递函数来实现整个主动降噪系统的搭建。笔者还通过自适应有源噪声控制系统的仿真,证明了利用建模获取的参数可以有效地抑制磁共振噪声。
1 磁共振扫描噪声分析
MRI扫描实验是在Magnetom Prisma 3.0 T(Siemens)磁共振成像系统下进行的,实验中利用Brüel & Kjær 2250型手持式声级计采集噪声。考虑到在强磁场下,声级计无法正常使用,在测试过程中,利用原装的10 m延长线缆(型号:AO-0441-D-100)将麦克风和声级计主机隔开。
在频域范围内,利用BZ-7223 (Brüel & Kjær)软件分析麦克风采集的磁共振扫描噪声,如图2所示,使用常规回波平面成像脉冲(echo planar imaging,EPI)序列(给病人检查时,经常使用的序列),在扫描过程中测得噪声的1/3倍频程频谱(Z计权)。从图中可以看出频率在1 kHz处的噪声声压级最大,最高达到97.6 dBZ,而且说明了噪声的能量主要集中在1 kHz频率附近。
笔者还对其他扫描序列所对应的噪声信号进行了分析,结果如表1所示。从表中可以看出,对应扫描序列不同,得到的噪声强度也会不同,另外对于同一个扫描序列,参数选取不同,产生的噪声强度也不同。数据表明,不同扫描序列对应的噪声最大强度的频率主要分布在3 kHz范围内,还可以看出常规EPI序列扫描得到的噪声强度相对于其他扫描序列更大,因此为了降低噪声对fMRI扫描图像的影响,对磁共振扫描噪声的控制刻不容缓。

表1 不同MRI扫描序列下测得的磁共振噪声强度Tab. 1 The measured noise intensity for different MRI scanner sequences
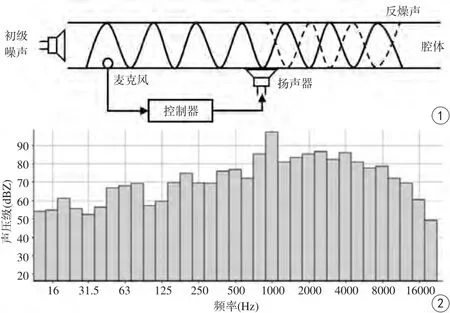
图1 有源噪声控制原理图 图2 常规EPI序列扫描时噪声的1/3倍频程频谱Fig. 1 The schematic diagram of active noise control. Fig. 2 1/3 Octave Spectra of scanning noise for conventional EPI sequence.
2 次级通道的建模方法
有源噪声控制技术有前馈控制系统和反馈控制系统两种实现方法,反馈控制系统不需要实时提前获取噪声信号的信息,需要通过误差麦克风采集的误差信号来预测反噪声信号,而前馈控制系统需要预先采集噪声信号,作为ANC系统的参考输入来预测反噪声信号,因此相比较而言,前馈控制系统能够及时、有效地预测反噪声信号,从而更好地抑制噪声信号,达到更好的降噪效果,因此笔者将采用前馈ANC控制系统来抑制磁共振噪声。如图3所示,磁共振扫描噪声在磁体腔内部,通过空气传递到被试耳道位置,即待降噪点。P(n)为初级噪声源到待降噪点的初级声通道传递函数,MRI噪声经过初级声通道后变为d(n)。自适应控制器(包括自适应滤波器和自适应算法)利用采样获取的参考噪声信号x(n)来预测反噪声信号y(n),然后y(n)经过数模转换器(D/A)、扬声器驱动器以及扬声器之后输出,该输出信号y'(n)用于抵消待降噪点处的噪声信号d(n)。然后待降噪点处的误差麦克风采集误差噪声信号e(n)作为滤波器的误差输入信号。
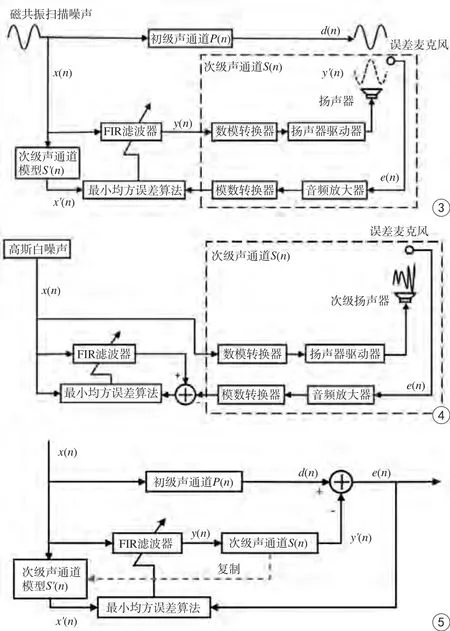
图3 有源噪声前馈控制系统 图4 离线建模原理 图5 FxLMS算法框图Fig. 3 Active noise feedforward control system. Fig. 4 Off-line modeling schematic. Fig. 5 Block diagram of FxLMS algorithm.
滤波器的输出至滤波器误差输入之间的次级通道S(n),会对输出信号y(n)以及误差噪声e(n)的幅值和相位产生影响,因此需要对该通道进行建模,即获取数模转换器(D/A)、扬声器驱动器、扬声器、误差麦克风、音频放大器、模数转换器(A/D)以及扬声器到误差麦克风之间的声通道等环节的传递函数。为了获取次级通道的传递函数估计值S'(n),笔者将采用自适应建模的方法,该方法是利用自适应滤波原理来估计物理通路的传递函数,建模方式可以分为离线建模和在线建模两种方法[20]。
在线建模主要用在次级通道的幅值及相位特性不断变化的情况下,它能够跟踪次级通道特性的变化,但是具有算法运算量大、收敛速度慢等缺点,还会使得建模附加的噪声传播至被试耳道内。然而对于功能磁共振成像扫描,被试头部位于扫描腔中心,扫描室内的MRI系统部件、环境温度以及被试的位置等因素,在扫描过程中基本保持不变或者变化缓慢,因此可以利用离线建模的方法来预先对S(n)进行建模,并利用建立的传递函数S'(n)实现有源自适应噪声控制系统仿真,离线建模具有控制算法简单、收敛速度快、建模精度高等优点。因此笔者将采用离线建模的方式,来获取次级通道的传递函数。
离线建模方法分为时延估计法、双传声器法和附加随机噪声法三种,Eriksson等[21]最早提出了附加随机噪声法,即附加噪声源与扬声器相连,同时将激励信号送入自适应滤波器作为参考输入,误差麦克风输出信号作为滤波器的输入信号(图4)。
磁共振噪声频谱较宽,包含了20 Hz到-20 kHz的声音频率,因此在建模过程中,可以采用附加与待控制的噪声不相关的高斯白噪声的离线建模方法[22-23],该噪声包含负无穷到正无穷的所有频率分量,频率范围较广,可以使得建模的结果适用于整个感兴趣的频率范围,与附加待控制噪声建模的方法相比,控制算法的收敛速度较快,对被控信号变化的响应速度和计算的复杂程度等方面具有优越性[24],并能够准确地获取次级通道传递函数的估计值。
3 算法
在MRI扫描过程中,噪声会随着扫描序列的变化而发生改变,因此为了实时地降低被试接收到的噪声强度,实验中采用的自适应控制系统中,需要利用自适应控制器来实时跟踪误差噪声和预测反噪声。自适应控制器主要包含滤波器和算法两个部分,滤波器通常采用有限冲激响应( finite impulse response,FIR)结构或无限冲激响应(in finite impulse response,IIR)结构,但是与IIR滤波器相比,FIR滤波器具有线性相位,且容易设计。另外FIR滤波器不存在反馈回路,所以其结构较为稳定,但是IIR滤波器在自适应控制过程中很难控制极点的位置,易出现不稳定的问题[25],因此笔者选用FIR滤波器。
自适应算法主要包括两种基本的算法:最小均方误差(least mean square,LMS)算法和递推最小二乘(recursive least square,RLS)算法。由Widrow等[26]提出的LMS算法,具有计算量小、易于实现等优点而在实践中被广泛采用。LMS算法的基本思想:调整滤波器自身参数,使滤波器的输出信号与期望输出信号之间的均方误差最小。但是LMS算法并没有考虑到次级通道对降噪结果的影响,因此为了达到更好的降噪效果,笔者将采用结合FIR滤波器和LMS算法的滤波-x最小均方误差( filter-x least mean square,FxLMS)算法[27-28],该算法最早是由Burgess[29]在1981年命名的,在有源噪声控制中,已经成为有源控制算法中的经典和最常用的算法,下面将对FxLMS算法进行分析。
图5为FxLMS算法框图,FIR滤波器的输入信号,参考噪声源:

滤波器权矢量:

式(1)和(2)中n表示采样时刻,L表示滤波器阶数。
则滤波器输出:

因此,误差信号:

式(4)中d(n)表示待抵消噪声,y(n)表示自适应算法输出的反噪声,y'(n)表示反噪声误差噪声,S(n)表示次级声通道。
目标函数可以表示为:

则滤波器更新公式为:

式(6)中算法的输入参考噪声x'(n)=x(n)*S'(n),S'(n)表示次级声通道模型。

图6 噪声采样和输出程序 图7 次级通道建模程序框图Fig. 6 Noise sampling and output programs. Fig. 7 Secondary path modeling program block diagram.

图8 A:次级通道参数;B:初级通道参数Fig. 8 A: Secondary path parameters. B: Preliminary path parameters.
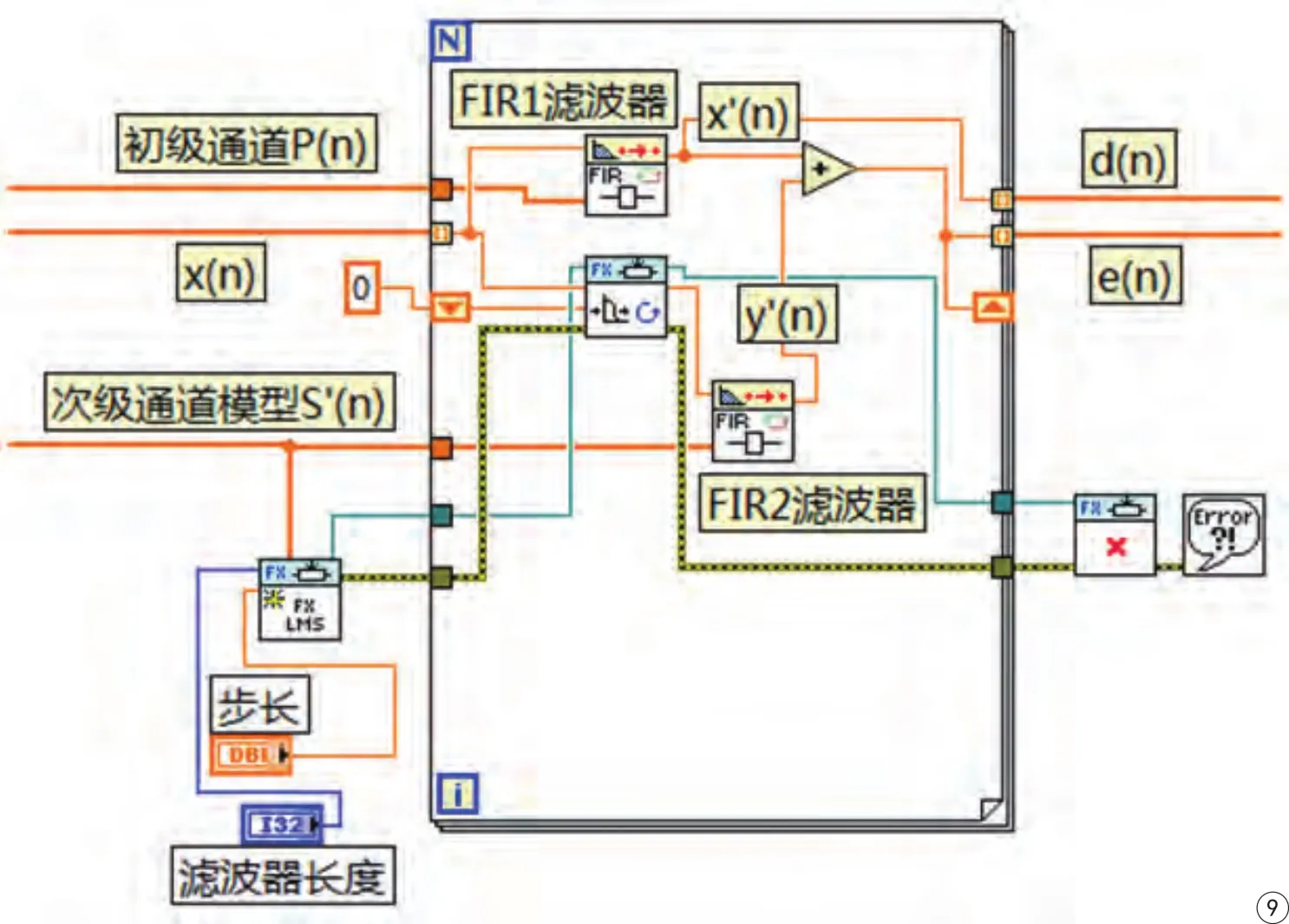
图9 自适应有源噪声控制系统仿真Fig. 9 Adaptive active noise control system simulation.
从上述推导可以看出,FxLMS算法滤波器的权矢量W(n+1)迭代公式中含有信号矢量x'(n),它是输入信号矢量与次级通道的脉冲响应函数的卷积,因此准确地获取次级通道的传递函数是设计有源前馈控制系统的关键步骤,且次级通道传递函数是否符合实际次级通道的特性,将直接影响降噪系统的稳定性和降噪量[30]。
4 实验及结果分析
4.1 次级通道离线建模
为了实时抑制磁共振噪声,降噪系统需要实时地跟踪误差噪声的变化,因此要求声音的采集和处理设备能够高速率地采集和处理磁共振信号。美国国家仪器(National Instruments,NI)的可编程数据采集模块USB-7856R(多功能可重配置I/O设备)(http://www.ni.com/pdf/manuals/374952b.pdf)每通道具有专用模数转换器(ADC),用于独立的定时和触发,它还具有用户可编程FPGA (fieldprogrammable gate array)器件,可用于高性能板载处理和对I/O信号进行直接控制,以确保系统定时和同步的完全灵活性。因此本实验将基于USB-7856R设备,同时利用LabVIEW FPGA模块软件对该设备进行配置,开发噪声的实时采样和输出程序(图6)。在实验中,利用先入先出队列( first input first output,FIFO)实现FPGA终端与上位机之间的数据传输,最终在上位机中实现次级通道建模程序的设计。
在LabVIEW FPGA终端内部(图6),在顺序结构的第一帧,定时器用于控制程序的采集和输出速率。第二帧中,将高斯白噪声发生器函数控件与USB-7856R模拟输出接口AO1相连,然后利用USB-7856R外接的驱动器驱动扬声器输出噪声信号,信号经过空间传播至待降噪点处,此时利用误差麦克风采集噪声信号,信号经过音频放大器后,通过模拟输入接口AI1传输至FPGA终端。然后利用FIFO将FPGA终端高斯白噪声以及误差麦克风采集的噪声信号传输至上位机分别作为滤波器参考输入信号x(n)和误差输入信号e(n)。

图10 噪声控制前的噪声频谱Fig. 10 Noise spectrum before noise control.
根据次级通道离线建模具体流程(图3),在上位机中,建立次级通道建模程序(图7),图中依据麦克风采集的信号e(n),利用滤波器对x(n)进行滤波处理,并预测反噪声信号y(n),同时迭代地更新滤波器权矢量W(n)。当滤波器误差输入信号e(n)趋近于0时,则自适应建模程序停止运行,建模过程结束。自适应建模过程中,滤波器长度(记为L)为256,步长(也被称为收敛系数,记为μ)为0.002。程序运行结束后,误差输入信号e(n)趋近于0时,建模所获得的次级通道传递函数的估计值S'(n)如图8A所示。从图中可以看出抽头数大于50时,S'(n)的值接近于0,因此当S'(n)的长度取50时,建模获取的参数即可描述次级通道的脉冲响应特性。从建模结果来看,利用附加高斯白噪声离线建模的方法,可以很好地建立出次级通道的参数模型。为了完成自适应有源噪声控制系统的仿真,笔者将采用与次级通道离线建模同样的方式,对初级声通道进行了离线建模,结果如图8B所示。
4.2 自适应有源噪声控制仿真
依据图3中的控制系统,搭建了自适应有源噪声控制的仿真程序(图9)。笔者采用实测的fMRI扫描噪声作为初级噪声源(图10),在实验前期,用于探究笔者搭建的自适应有源噪声控制程序是否正确。如图9,利用建模获取的包含有通道脉冲响应函数的相位和幅值信号参数S'(n)、P(n),并结合FIR滤波器(相位和幅值可设置)分别创建次级通道和初级通道模型。实测的噪声信号x(n)经过FIR1滤波器后,成为待降噪点处的待控制信号d(n)。

图11 噪声控制的仿真结果Fig. 11 Simulation results after noise control.
自适应过程中,x(n)通过自适应控制器(由自适应LMS算法和滤波器组成),控制器预测反磁共振噪声y(n),然后y(n)经过次级通道后输出噪声y'(n)。在待降噪点处,将y'(n)与d(n)叠加后剩余的误差噪声信号e(n)作为自适应滤波器的误差输入信号,重复以上过程,直至e(n)达到最小值后,自适应有源噪声控制系统停止运行。在利用声级计分析MRI扫描噪声的过程中,同时利用电脑声卡外接麦克风(型号:Takstar MS-550)来采集MRI扫描噪声,并作为自适应有源控制系统仿真过程中所使用的初级声源。如图10所示,实测的扫描噪声信号的频谱图,最大峰值在1 kHz附近,与图2中所对应的是同一个常规回波平面成像脉冲扫描序列。
仿真实验中,多次改变滤波器长度和步长的大小,获得仿真结果如图11所示。从图中可以观察到,设置不同的滤波器参数,降噪结果也不同,设置不当还会导致噪声信号发散。从图11(A)、11(B)和11(C)中可知,滤波器长度相同且步长不同时,在926.1 Hz处,降噪后的噪声与原始噪声相比,噪声控制后,幅值分别降低了4 dB、19 dB、25 dB左右。其中图11(B),在整个频率范围内降噪效果最好,没有出现明显的噪声增大现象,但是图11(C)在3572.1 Hz噪声幅值增加了30 dB左右。
与图11(B)的结果相比,当滤波器长度增加时,图11(D)中,在926.1 Hz处实现了22 dB的降噪效果,但是其在3528 Hz处噪声幅值增加了45 dB。如图11(A)、11(E)、11(F)所示,它们在926.1 Hz频率处,各实现了4 dB、11 dB以及12 dB的降噪效果,结果表明当滤波器步长相同时,滤波器长度增大时,能够改善低频范围内的噪声抑制效果。因此在实验过程中,滤波器长度和步长的选取至关重要。
5 结论
笔者详细介绍了次级通道建模的方法以及实现离线建模的过程,最终利用NI USB-7856R实现了有源控制系统的次级通道离线建模。从建模结果来看,利用附加高斯白噪声离线建模的方法,可以准确地建立出次级通道的参数模型。
另外,在自适应有源噪声控制系统的仿真实验中,利用建模过程中获取的通道参数,可以得到19 dB左右的降噪效果。因此在磁共振噪声控制系统设计的过程中,可以利用附加高斯白噪声的方式实现次级通道模型的建立,为接下来进一步实现实时控制功能磁共振成像过程中的扫描噪声打下了基础。
实验还存在许多不足的地方,在实际建模过程中,笔者利用了有限阶数的FIR滤波器取代了无限长信号响应、各种电子设备的传递函数、控制扬声器与误差麦克风相对位置的摆放等方面,都会影响建模结果,进而影响磁共振噪声的抑制效果,因此接下来我们要在现有系统结构的基础上,优化滤波器的参数、电子设备参数以及为电声器件选择合适的布放位置。目前,利用搭建的有源控制系统软件及硬件平台,可以实现对含有多个频率成分的正弦波噪声进行实时地控制,实验结果取得了很好的降噪效果。接下来我们要在搭建的平台基础上,进一步对采集的磁共振扫描噪声进行实时的控制,最终选择合适的电声器件,将有源控制系统应用在实际的fMRI扫描实验过程中。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
环境保护与循环经济(2021年7期)2021-11-02
防爆电机(2021年4期)2021-07-28
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2019年3期)2019-04-25
通信电源技术(2018年3期)2018-06-26
中成药(2018年2期)2018-05-09
火控雷达技术(2016年3期)2016-02-06
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
广西文学(2015年9期)2015-10-24