大惯量系统位置控制策略研究
2018-12-06 02:26张福建黄宗卫
机电工程技术 2018年10期
张福建,黄宗卫
(中国船舶重工集团公司第七二三研究所,江苏扬州 225001)
0 引言
在伺服机构中,若需将运动机构从当前位置运动到指定位置时,传统的控制方法是通过将目标指令直接给到P(PI或PID)控制器并限制控制器的输出(对于小惯量或极小惯量控制系统可以不加限制)实现[1-3]。这种控制方法易于实现,但可能引起结构上的冲击,长期工作易导致结构件损坏,对于大惯量伺服系统[4-6]尤为明显。
本文介绍了一种被控对象以可变速度向目标位置运动的算法。该算法根据被控对象与目标的实际距离实时改变运动速度,实现被控对象启动和停止时平稳过渡。
1 设计原理
实现被控对象的平稳启动,核心就是控制被控对象的加速度,使其以不超出设计能力的加速度或以规定的加速度从0开始运动,在接近目标时,使其以不超出被控对象设计能力的减速度或以规定的减速度减速至0。被控对象理想的运动轨迹和速度轨迹如图1和图2所示。
如图1和图2所示,在整个工作阶段,被控对象速度从0开始,逐渐加速至允许的最高速度,保持该速度,最后减速,直至速度重新减为0。

图1 理想的运动轨迹
假设要求被控对象的加速度和减速度分别为a1和a2,最大速度为Vmax,最小速度为Vmin,当前速度为V,目标点距离被控对象的位移为S(a1、a2、V和S均为矢量)。首先,当前速度大于等于0时,判断被控对象在当前位置以当前速度匀减速至0时的位移是否大于S,是则被控对象此刻开始匀减速,否则被控对象继续加速(未达最大速度)或保持当前速度(已达最大速度);其次,当前速度小于0时,判断被控对象在当前位置以当前速度匀加速至0时的位移是否小于S,是则被控对象此刻开始匀加速,否则被控对象继续减速(未达最小速度)或保持当前速度(已达最小速度)。在解算时需确保当前速度不超过Vmax和Vmin。轨迹算法流程如图3所示。
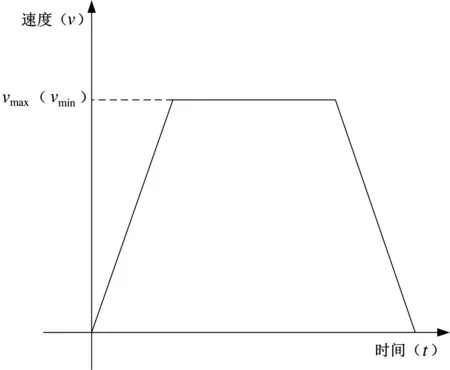
图2 理想的速度轨迹
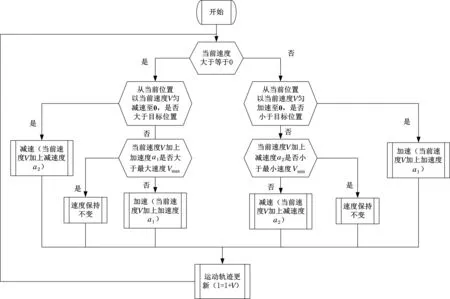
图3 轨迹算法流程图
2 算法实现
由图3可以看出,实现该算法主要包含两个部分。首先,当前速度大于等于0时,判断被控对象从当前位置以当前速度匀减速至0时,其位移是否会大于目标位置。其次,当前速度小于0时,判断被控对象从当前位置以当前速度匀加速至0时,其位移是否会小于目标位置。
根据位移公式:

可以推导出被控对象在当前位置以当前速度匀加(减)速至速度0时的位移是:其中vt为当前速度;a为加(减)速度,vt大于等于0时,a取a2,即减速度,vt小于0时,a取a1,即加速度。以上判断过程可以表述为:
(1)若vt≥ 0且-≥s时,即被控对象以当前速度匀减速至0,其位移大于等于目标位置,则vt+1=vt+a2,做减速运动;
(2)若v≥ 0且t若v+a≤V,即加速t1max后不大于最大速度,则vt+1=vt+a1,继续做加速运动,否则保持当前速度;
(3)若vt<0且 -≤s时,即被控对象以当前速度匀加速至0,其位移小于等于目标位置,则vt+1=vt+a1,做加速运动;
(4) 若 vt<0且>s时,若vt+a2≥Vmin,即减速后不小于最小速度,则vt+1=vt+a2,做减速运动,否则保持当前速度。
3 结果分析
图4、图5为该算法的Simulink∕Matlab[7-8]仿真结果。图4中,横轴为时间,纵轴为位置∕轨迹,实线表示目标位置,在70°和-30°之间不断发生变化,虚线为该算法计算后的轨迹。图5中横轴为时间,纵轴为速度。由图可以看出,当目标位置发生变化时,输出的目标轨迹始终按照设定的加(减)速度变化,在开始加速和接近目标位置时,速度均没有发生突变。

图4 仿真结果(位置∕轨迹)

图5 仿真结果(速度)
该算法支持被控对象在运动过程中的任意时刻修改目标位置,而不会使被控对象产生冲击。
4 总结
该算法非常适合于大惯量伺服系统的位置闭环控制或被控量的变化率受限的应用场合,并且,结合前馈控制方式,对被控对象运动轨迹可以实现较高的控制精度。对角度做简单的处理,该算法也可应用于可360°连续旋转的运动机构的控制。该算法已经应用于多型设备中对旋转机构扇扫及调舷的控制,效果良好。
猜你喜欢
现代电力(2022年2期)2022-05-23
读友·少年文学(清雅版)(2020年4期)2020-08-24
环球时报(2020-08-11)2020-08-11
读友·少年文学(清雅版)(2020年3期)2020-07-24
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
现代装饰(2018年5期)2018-05-26
中国惯性技术学报(2018年1期)2018-05-10
中国三峡(2017年2期)2017-06-09
中北大学学报(自然科学版)(2015年6期)2015-12-02