
基于卷积神经网络的轨道扣件状态检测
2018-12-10 05:55熊新娟
实验室研究与探索 2018年11期
刘 欣, 张 瑶, 熊新娟
(南京工程学院 工业中心,南京 211167)
0 引 言
铁路扣件是铁路轨道系统的重要部件,是铁路轨道安全的重要保障,运行过程中扣件损坏或缺失会造成巨大安全隐患甚至酿成重大事故。目前我国主要是采用人工巡检的方式检测轨道扣件状态,效率和准确率低,已难以适应我国轨道交通事业的快速发展。
随着计算机图像技术的发展,国内外开始研究基于机器视觉的扣件状态检测系统,通过人工特征提取或特征学习方法对轨道扣件图像进行描述,然后使用分类器判别轨道扣件的使用工况。文献[1-2]中采用尺度不变特征转换(Scale Invariant Feature Transform, SIFT)、方向梯度直方图(Histogram of Oriented Gradient, HOG)等局部特征提取方法,然后结合支持向量机(Support Vector Machine, SVM)、近邻算法(K-Nearest Neighbor, KNN)等机器学习算法进行轨道扣件图像的状态识别,取得了不错的成果。然而,由于原始图像很难通过直观的理解提取出丰富且有效的特征,底层特征提取往往需要大量数据预处理工作,难以通过人工的方式设计有效的特征集合。
近年来,基于深度学习(Deep Learning)[3-4]以及卷积神经网络(Convolutional Neural Network, CNN)的图像分类方法成为图像识别领域的热点,可以通过有监督或无监督的方式学习层次化的特征描述,能够有效降低对图像数据处理的要求,避免复杂的特征提取工作,从而取代手工设计或选择图像特征的工作。本文将深度学习技术引入铁路轨道安全检测领域,提出基于CNN的轨道扣件检测算法,以提高扣件状态检测的效率和准确率。
1 卷积神经网络
CNN是一种多层神经网络,目前已成功应用于手写字符识别[5]、视觉追踪[6]、图像分类[7]等机器视觉领域,它直接利用图像像素信息作为输入,通过多层卷积操作进行特征的提取和高层抽象,最大程度上保留了输入图像的所有信息,并且能够容许图像的畸变。
一个典型的用于图像分类的CNN[8]如图1所示,其中,输入层为图像的像素矩阵;卷积层中的神经元只与上一层相连接,提取其局部的特征,卷积层通常设多个节点,通过卷积层处理后数据矩阵的深度会增加;池化层是把输入信号分割成不重叠的区域,通过池化操作过滤掉一些不重要的高频信息,有效地缩小矩阵的尺寸,加快运行速度;卷积层和池化层可以均设置多个交替进行,经过多轮的卷积和池化操作后,图像特征提取的过程基本完成;最后再经过1~2层全连接和Softmax处理完成最终的分类任务。

图1 卷积神经网络结构
卷积神经网络与传统的特征提取算法和一般神经网络在图像处理方面具有如下优点[9]:① 特征提取和模式分类同时进行,不需要对图像进行预处理。② 输入图像和网络的拓扑结构能很好地吻合,该网络结构对平移、比例缩放、倾斜或者其他形式的变形具有高度不变性。③ 利用卷积的权值共享方法,大幅减少了网络的训练参数,防止过拟合的同时又降低了神经网络模型的复杂度。
2 卷积神经网络扣件检测算法
2.1 网络结构
本文基于CNN建立了一种轨道扣件检测算法,其网络框架由6层构成,在典型CNN的基础上,引入了激活函数(Rectified Linear Units,ReLU)[10]和弃权技术[11-12],基本框架如图2所示。
图中:Input为输入层,为轨道扣件的图像数据。原始图片是由高速巡检列车上CCD相机采集,每张原始图片一般包含多个扣件,经过扣件定位及图像分割等预处理后,将每个扣件区域的图像提取出来,并调整成64×96(rows×cols)像素大小统一的灰度图像。通常将输入层视为第0层,表示为a,a0∈R64×96×1。
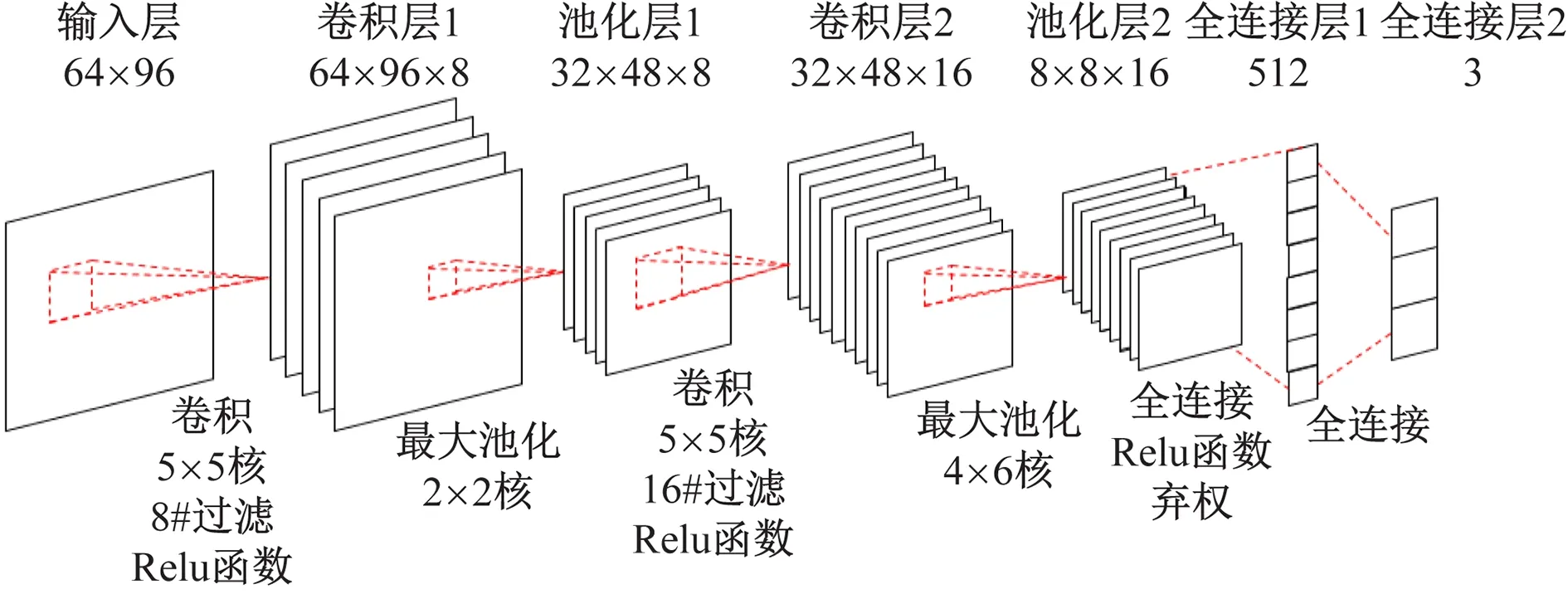
图2 本文扣件检测算法框架

此处,将卷积结果经过激活函数(Activation Function)后的输出作为本层的特征图(Feature maps),实现神经网络的非线性,激活函数采用ReLU函数。第1层的输出表示为a1,a1∈R64×96×8。


其中,Bernoulli函数是以概率P随机生成一个0或1的向量,此处取P=0.5。
全连接层2为第2个全连接层,乘以权重W6(W6∈R512×3)并附加偏置b6,F6的长度为3的向量,采用Softmax分类器处理之后就得到了最终的分类结果a6
2.2 损失函数
神经网络模型的效果以及优化的目标是通过损失函数来定义的。损失函数刻画了神经网络预测结果和真实结果之间的差距,对于分类问题,交叉熵是其中使用最广得一种损失函数。
(18)
CNN利用链式求导计算损失函数对每个权重的偏导数(梯度),通过反向传播算法[13-14],根据定义好的损失函数调整和优化网络中参数的取值,从而使网络模型在训练数据集上的损函数达到一个较小值。
3 卷积神经网络训练
3.1 数据集
常见的轨道扣件状态如图3所示。通过对预处理后的轨道扣件图像的筛选对比,分别选出具有代表性的图像1 842个作为本算法的样本集,其中正常扣件的图像902个,扣件部分断裂的482个,扣件丢失的图像458个,像素大小均为96×64 pixel。
相比传统图像识别算法,CNN是许多节点层组成的复杂架构,训练时有大量需要评估的参数,如权重、偏差等,因此需要更多的训练数据满足适当的收敛。
鉴于轨道扣件的样本数量较少且存在不均衡,对样本集的图像进行图像数据增强处理[15]。通过对图像进行垂直或水平的翻转变换、局部高斯模糊、对比度变换、缩放、旋转、平移、尺度变换、添加噪声扰动等随机处理。经过增强处理之后,样本集数量增加5倍,达到9 210个,将其中约80%的图像作为训练集进行训练,剩余约20%的图像作为测试集用于测试。经过数据增强后的图像如图4所示。

(a) 正常扣件(b) 扣件部分断裂

(c) 扣件丢失
图3 常见的轨道扣件状态









图4 数据增强后的扣件图像
3.2 训练结果
实验采用本算法对训练数据集进行训练,学习率设为0.000 1,迭代次数为6 000,批数据量为50,完成训练后,用测试数据集验证学习模型的准确率。为了进行对比,本文还采用了典型CNN算法,在相同的神经网络参数下,分别引入不同的优化方法:ReLU+Dropout、Data Augmentation进行训练和测试,结果如图5所示。

图5 不同优化方法的CNN正确率
从图5可以看出,采用典型CNN算法的扣件状态识别正确率可以达到91.6%,引入ReLU+Dropout后的CNN算法正确率可以达到96.7%;对样本进行图像数据增强处理后,典型CNN算法正确率达到93.8%,引入ReLU+Dropout后的CNN算法正确率可达到98.1%。近邻算法、融合PHOG和MSLBP特征的准确率分别为95.3%和97.7%。
4 结 语
本文将深度学习技术引入铁路轨道安全检测领域,提出了基于CNN的轨道扣件检测算法,通过在CNN基础上使用ReLU激活函数,引入Dropout弃权技术,以及对原始图像采用图像数据增强技术,对识别算法进行了优化。经过对轨道扣件图像识别的实验验证和对比,结果表明本算法不需要进行特征提取等预处理操作,且准确率优于传统算法,在轨道扣件图像的状态识别上有一定优势,有望在铁路巡检系统上推广使用。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
铁道建筑技术(2020年11期)2020-05-22
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2018年19期)2018-11-14
西南交通大学学报(2018年5期)2018-11-08
北京航空航天大学学报(2018年1期)2018-04-20
自动化学报(2017年11期)2017-04-04
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
城市轨道交通研究(2015年3期)2015-02-27
