通过斗轮机位置数据共享实现两机防撞
2018-12-13 07:02杨柳中国电建集团长春发电设备有限公司
数码世界 2018年11期
金 弘 杨柳 中国电建集团长春发电设备有限公司
一、前言
斗轮机是现代化工业大宗散状物料连续装卸的高效设备,目前已经广泛应用于港口、码头、冶金、水泥、钢铁厂、焦化厂、储煤厂、发电厂等散料(矿石、煤、焦碳、砂石)存储料场的堆取作业。当两台斗轮机公用一条轨道时,为了避免两台斗轮机相撞,除了要求操作人员时刻保持注意力,还要借助激光检测作为防撞保护装置。
但是激光检测防撞装置对于安装位置有一定要求,在其安装位置之间不能有任何遮挡物,而且激光检测装置一旦出现故障操作人员无法及时察觉,当操作人员过分依赖激光检测装置时,事故就有可能发生;随着互联网时代的到来,共享模式已经深入到社会的每一个领域,汽车共享、单车共享、充电宝共享、雨伞共享,表面上它们共享的是产品,背后支撑它们的是庞大的数据共享,而共轨的两台甚至是多台斗轮机也可以借鉴共享模式,将它们的位置数据进行共享,当然共享的前提是数据一定要精确,所以将RFID(无线射频识别)引入到斗轮机的定位系统之中,不仅可以将两台斗轮机的位置数据规定在同一数据模式下,也为两台斗轮机位置数据共享提供了精度保证,当两台斗轮机位置数据实现共享之后,操作人员可以在斗轮机上看到轨道上任意一台斗轮机的位置数据,同时在程序编写中设置一定的安全距离,从而实现两机防撞的功能。
二、问题的难点和解决方案
2.1 问题的难点
一是共轨斗轮机通常采用激光检测装置,但是激光检测防撞装置对于安装位置有一定要求,在其安装位置之间不能有任何遮挡物,而且激光检测装置一旦出现故障操作人员无法及时察觉,当操作人员过分依赖激光检测装置时,事故就有可能发生。二是如果采用编码器定位的数据共享,由于编码器本身存在一定的误差,而两台斗轮机的编码器数据误差会被进一步放大,而数据共享的前提是数据一定要准确。三是如何实现两台斗轮机的数据共享?四是如何利用共享后的位置数据?
2.2 解决方案
(1)斗轮机通过位置数据共享实现的两机防撞功能。如果两台斗轮机可以知道彼此所在料场的准确位置,斗轮机通过在程序里设置安全距离,可以实现近距离提醒以及防撞报警的功能。
(2)采用RFID(无线射频识别)对编码器进行位置校正。从概念上来讲,RFID类似于条码扫描,对于条码技术而言,它是将已编码的条形码附着于目标物并使用专用的扫描读写器利用光信号将信息由条形磁传送到扫描读写器;而RFID则使用专用的RFID读写器及专门的可附着于目标物的RFID标签,利用频率信号将信息由RFID标签传送至RFID读写器。斗轮机利用RFID主要是将料场的位置信息设置在RFID中,当两台斗轮机读取他们所在位置的位置信息就实现了斗轮机的精准定位,而且这种定位方式是将两台斗轮机的位置建立在统一坐标系中,即使产生误差,两台斗轮机之间的距离数据也是精准无误的。
(3)通过工业以太网通讯实现两台斗轮机的数据共享。通过两台斗轮机PLC的以太网模块,利用光纤或无线通讯技术,可以将两台斗轮机的PLC建立在同一网络中,这里可以采用硬件组态,也可以通过使用 SFC65“X_SEND”和SFC66“X_RCV”发送和接收数据,都可以实现两台斗轮机的位置数据共享。
(4)通过程序编写,通过对比两台斗轮机的位置数据设置安全距离从而实现斗轮机两机防撞功能。当斗轮机1的位置数据DATA1与斗轮机2位置数据DATA2的相对距离达到报警距离时,会对两台斗轮机进行预报警,当两台斗轮机之间的距离小于安全距离时会触发斗轮机防撞报警。
三、系统的整体设计方案
3.1 系统的构成
采用RFID位置校正的斗轮机定位装置,带有主从站的西门子品牌的斗轮机PLC控制系统,采用光纤通讯,一套工业交换机,一台装有西门子工控软件的笔记本电脑。
3.2 具体方案
3.2.1 在堆取料机侧下方安装 RFID 读写头,在皮带机机架上每隔若干米安装一个载码体,每个载码体存储当前具体的位置信息。当读写头经过载码体时,会从载码体内读取出当前位置信息,然后通过 PROFIBUS-DP 总线接口通信模块将数据传输给 S7-400 PLC系统,PLC 将其与编码器位置信息比较,从而校正堆取料机行走位置。

3.2.2 建立两台斗轮机PLC的工业以太网
首先搭建一套测试设备,设备的结构图如下:
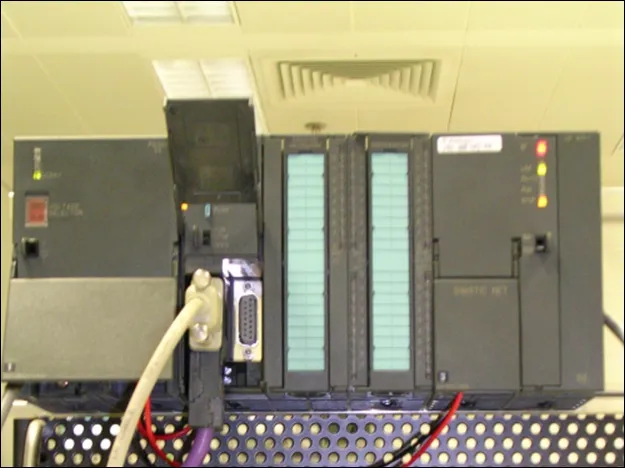
2套 S7-300系统由 PS307电源、CPU314C-2DP、CPU314C-2PTP、CP343-1、CP343-1 IT、PC、CP5611、STEP7 组 成,PLC 系统概貌如下图:
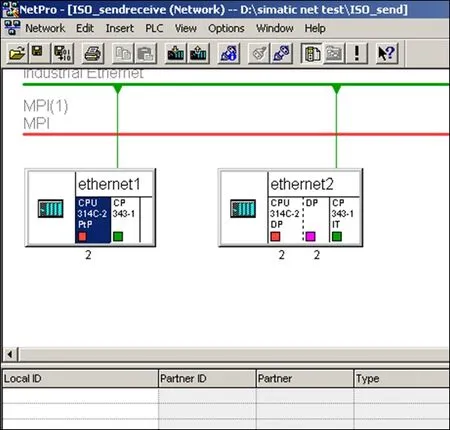
打开SIMATIC Manager,根据我们系统的硬件组成,进行系统的硬件组态,设置CP343-1、CP343-IT模块的参数,建立一个以太网,MPI、IP 地址:
组态完2套系统的硬件模块后,分别进行下载,然后点击Network Configration按钮,打开系统的网络组态窗口NetPro,选中CPU314,如下图:
到此为止,系统的硬件组态和网络配置已经完成。下面进行系统的软件编制,在SIMATIC Manager界面中,分别在CPU314C-2PTP、CPU314C-2DP中插入OB35定时中断程序块和数据块DB1,DB2,并在两个 OB35中调用FC5(AG_Send)和 FC6(AG_Recv)程序块,如下图:
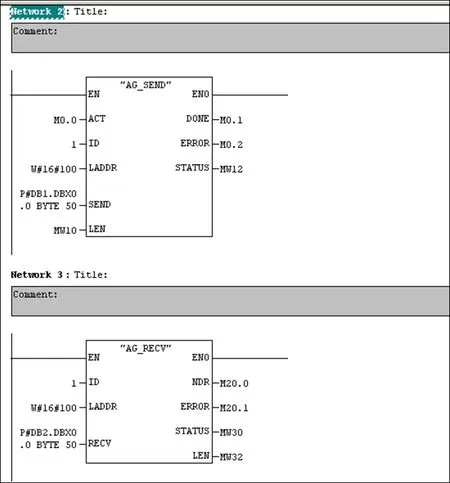
2套控制程序已经编制完成,分别下载到CPU当中,将CPU状态切换至运行状态,就可以实现S7-300之间的以太网通讯了。
如下界面说明了将CPU314C-2DP 的DB1中的数据发送到CPU314C-2PTP 的DB2中的监视界面:
a.选择Data View,切换到数据监视状态;
b.CPU314C-2DP 的DB1中发送出去的数据;
c.CPU314C-2PTP 的DB2中接收到的数据。
3.2.3 如果只是对位置数据进行共享也可以采用在A站(2号站)的PLC的定时循环中断组织块OB35中编写发送程序,把A站中的MB20~MB24发送到B站(3号站)。程序如下
CALL "X_SEND" //SFC65
REQ :=TRUE //使能端
CONT :=TRUE //通讯资源,=TRUE时,完成后保持连接,=FALSE时,不保持
DEST_ID:=W#16#3 //对方 PLC2 的MPI 地址
REQ_ID :=DW#16#1 //ID 号
SD :=P#M 20.0 BYTE 5 //2 号站要发送的数据区指针,MPI通讯一次最多可发送76个字节。
RET_VAL:=MW2 //状态返回字
BUSY :=M1.0 // 当前通讯有没有完成
2、在B站的OB1中编写接收程序,把A站(2号站)发送到的数据存入B站(3号站)的MB30~MB34中。程序如下
CALL "X_RCV" //SFC66
EN_DT :=TRUE //使能接收
RET_VAL:=MW2 //返回的状态字
REQ_ID :=MD4 //ID 号
NDA :=M1.1 // 接收完成一次,本位有一个扫描周期的高电平
RD :=P#M 30.0 BYTE 5 //3号站,将接收到的数据放到这个指定的数据区
3.2.4 当两台斗轮机的位置数据实现共享之后,利用斗轮机的位置数据进行编程设定,嘉定两台斗轮机之间的安全距离为40米,当斗轮机1 的位置数据DB1与斗轮机2的位置数据DB2之间的差小于等于40米时,处在前端的斗轮机无法进行后退操作,而处在后面的斗轮机无法进行前进操作。同时也可以将两台斗轮机的位置数据显示在司机室的触摸屏中,让操作人员可以实时观察两台斗轮机的各自所在的位置和相对距离,在人为操作层面提前做出安全操作。
3.2.5 当两台斗轮机之间建立了网络,数据可以进行交换和共享,可以共享的数据不仅仅只有位置数据,通过对斗轮机的不同运行数据可以实现两台斗轮机之间的高进度连锁控制功能,利用两台斗轮机的跟随调车功能,跟随作业功能,甚至是两台斗轮机的全自动控制功能。
四、结束语
斗轮机通过位置数据共享不仅可以实现的两机防撞功能,通过对大量斗轮机运行数据共享,可以开发出更多的多台斗轮机连锁控制功能,而斗轮机通过位置数据共享也不仅仅是取代了激光防撞检测装置,随着工业以太网的迅速发展,只要是工业以太网络的内的设备,都可以进行数据共享,功能连锁,不仅大大提高了工业的自动化程度,随着互联网的发展,远程控制,无人值守功能都离不开数据共享,而实现斗轮机防撞功能只是迈出了数据共享应用的第一步。
猜你喜欢
新型工业化(2022年3期)2022-12-17
科学与财富(2022年6期)2022-07-04
齐齐哈尔大学学报(自然科学版)(2022年4期)2022-06-15
汽车实用技术(2021年9期)2021-05-26
船舶标准化工程师(2019年5期)2019-11-29
汽车工程师(2018年1期)2018-07-13
电脑知识与技术(2018年8期)2018-05-07
东方教育(2017年17期)2017-10-31
中国航海(2017年4期)2017-04-02
青年时代(2017年7期)2017-03-28