基于自适应加权平均的路网MFD估测融合方法
2018-12-28 06:37林晓辉徐建闽
交通运输系统工程与信息 2018年6期
林晓辉,徐建闽
(1.华南理工大学土木与交通学院,广州510640;2.广东交通职业技术学院轨道交通学院,广州510650)
0 引言
如何缓解城市交通拥堵问题已成为众多学者的重点研究方向.近期,Daganzo和Geroliminis两位学者揭示了宏观基本图(Macroscopic Fundamental Diagrams,MFD)的客观存在性,他们认为MFD不仅可以对城市路网从宏观层面进行描述,而且可以监视和预测路网交通运行状态,为从宏观层面对过饱和路网实施交通控制策略提供了新思路,然而如何得到城市路网的MFD又成为一大难点.目前路网MFD可通过固定检测器(如环形感应线圈、视频检测器等)或GPS浮动车采集的交通数据来估测.固定检测器数据(Loop Detector Data,LDD)估测法是通过安装在路段的固定检测器实时采集交通数据,然后利用MFD相关理论,估测路网MFD.浮动车数据(Floating Car Data,FCD)估测法是通过安装有GPS车载终端的车辆(如出租车、公交),实时采集路网浮动车交通数据,采用行车轨迹估测法,可获取路网MFD.部分学者对两种估测方法进行了研究,如Courbon等[1]对理论分析法、LDD估测法、FCD估测法等3种路网MFD估测方法进行比较分析.Nagle等[2]提出浮动车覆盖率至少15%时,采用FCD估测法,可获得较为准确的路网MFD,但必须已知浮动车覆盖率,且均匀分布.Lu等[3]利用实际交叉口视频检测数据和出租车浮动数据,估测路网MFD.Leclercq等[4]利用实际路网获取的交通数据,比较了LDD估测法和FCD估测法等2种路网MFD估测方法差异.Du等[5]针对浮动车覆盖率在路网中不均匀,估测路网交通流量所需的等价浮动车比例,并利用少数浮动车数据估算路网交通流量和交通密度,从而估测路网MFD.Ambühl L.等[6]提出对上述2种方法进行数据融合,从而估测更加准确的路网MFD,但其数据融合算法是经过大量经验实验得到的,不具有普遍适用性.金盛等[7]提出对微波检测器和车牌识别的数据进行融合,构建MFD估测方法,但其数据融合模型以检测器所在路段长度占路网总长度的比例为权重,未考虑交通流离散性和检测器性能对交通参数精度的影响.
鉴于此,本文提出将LDD估测法和FCD估测法所得的交通数据结合起来考虑,以车联网下100%联网车数据(Network Car Data,NCD)估测的交通参数为检验数据,引入动态误差,对LDD估测法和FCD估测法估测所得的路网MFD加权交通密度和加权交通流量分别进行自适应加权平均数据融合,以便更加准确地估测路网MFD.在有固定检测器的路段,对固定检测器和浮动车所采集的交通数据进行自适应加权平均数据融合,得到路段加权交通流量和加权交通密度;在没有固定检测器的路段,用浮动车采集的交通数据提取路段加权交通流量和加权交通密度.最后依据数据融合的路网加权交通流量和加权交通密度,估测路网MFD.
1 路网MFD估测方法
1.1 LDD估测法
若路网中各路段均安装有固定检测器,则可直接通过固定检测器采集的路段交通流量和交通密度估测路网MFD,依据(Geroliminis and Daganzo)所提出的MFD相关理论,可知

式中:qw、kw——分别为路网加权交通流量(veh/h)、路网加权交通密度(veh/km);
li——路段i的长度(km);
qi——路段i的流量(veh/h);
ki——路段i的密度(veh/km).
1.2 FCD估测法
Edie[8]提出当路网所有车的轨迹可知时,根据行车轨迹可计算出路网的交通流量和交通密度.但实际上很难获取所有车辆的行驶状态(行驶距离和行驶时间),只能获取部分浮动车的行驶状态.Nagle[9]在Edie的基础上,提出假定浮动车在路网中的比例ρ是已知的,且在路网各区域均匀分布,那么依据式(1),可估算路网的交通流量和交通密度,公式为
m′——采集周期T内记录的浮动车数;
n——路网中路段总数;
T——采集周期(s);
2 自适应加权平均数据融合模型
2.1 加权平均法简介
加权平均法是一种最简单且易于理解的多源数据融合方法,它将来自不同传感在同一时刻获取的同一变量观测值进行加权平均,然后得到更加准确的融合数据.基于加权平均法的多源数据融合值为
式中:yi(t)——在t时刻第i种检测方式获得的交通参数;
wi(t)——在t时刻第i种检测方式的加权因子.
在加权平均法中,确定加权因子是最关键的步骤.传统的加权因子确定方法(如调查法、经验法等)存在较大的主观性.为了减少主观因素对路网MFD估测值的影响,本文采用自适应加权平均法,建立路网MFD估测数据融合模型.
2.2 构建自适应加权平均数据融合模型
(1)自适应加权因子的确定[10].
在自适应加权平均法中,引入了动态误差ed,i(t-1),其表达式为

式中:ed,i(t-1)——在时段t-1第i种检测方法的动态误差;
k——t时段之前的k个时段;
ear,i(t-k)——在时段t-k第i中检测方式的绝对相对误差,其表达式为

式中:y(t-1)——时段t-1的实际数据;
yi(t-1)——时段t-1第i种检测方法的估计数据.
各种检测方式的加权因子随着动态误差的变小而变大,因此,用反比例法确定各检测方式的初始加权因子,表达式为

为保证所有检测方式的加权因子之和为1,进行归一化处理,得到最终的加权因子为

(2)基于自适应加权平均的数据融合模型.
路网MFD估测的两个关键参数为路网加权交通流量和路网加权交通密度,因此分别对两个参数进行数据融合.具体流程如下:
①输入时刻t-1以前,固定检测器估测法和浮动车数据估测法所得的路网MFD参数;
②以100%联网车获得的MFD参数为实际数据,利用式(4)计算绝对相对误差;
③利用式(3)计算动态误差;
④利用式(5)确定初始加权因子;
⑤利用式(6)归一化加权因子;
⑥输入时刻t固定检测器估测法和浮动车采集估测法所得的MFD参数;
⑦将时刻t估测的MFD参数和归一化加权因子输入自适应加权平均融合模型;
⑧输出结果,得到时刻t数据融合后的MFD参数.
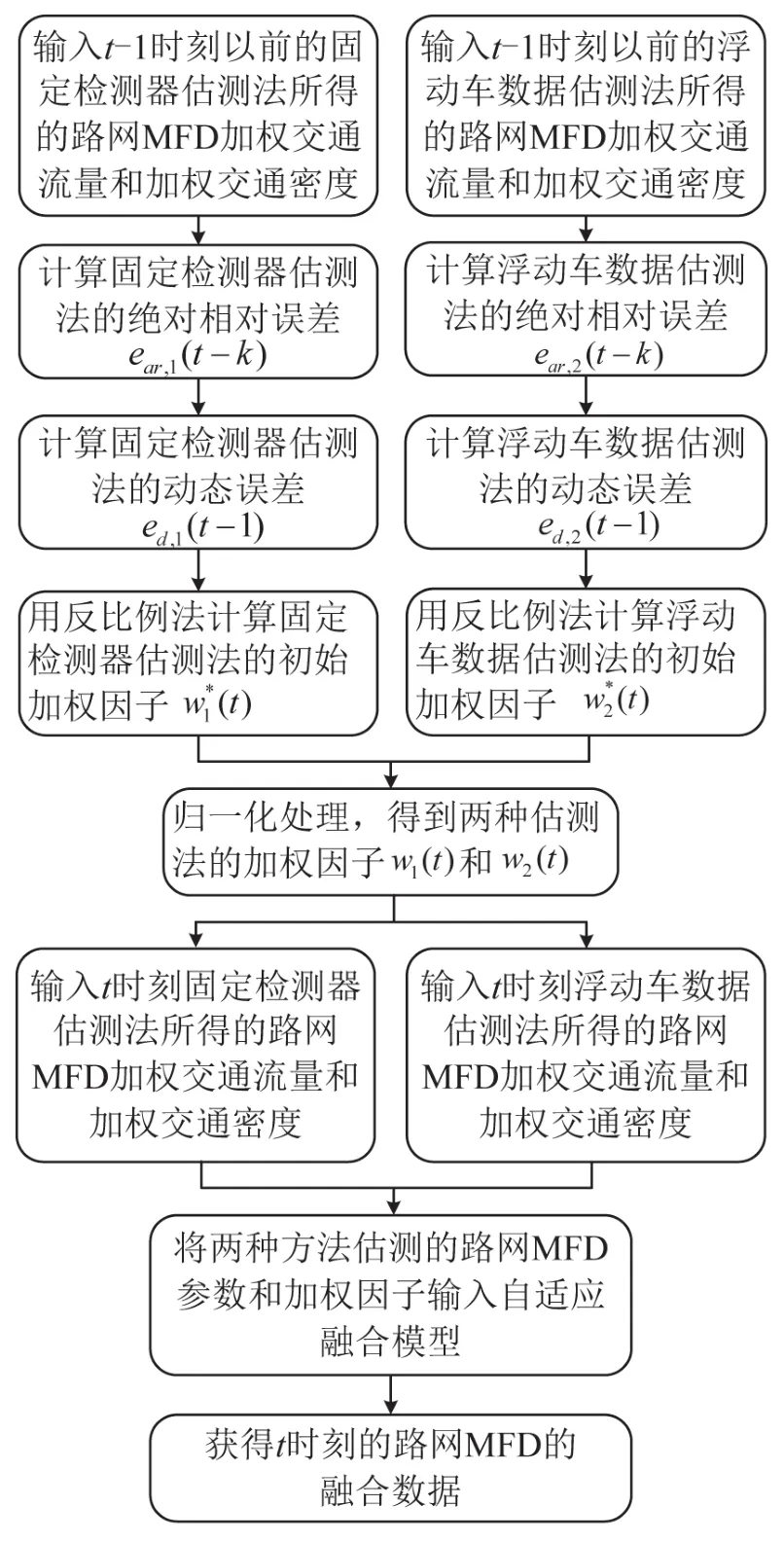
图1 自适应加权平均数据融合流程Fig.1 Adaptive weighted average data fusion model
3 路网MFD的差异性
采用状态比(Traffic State Ratio,R)评估各种估测方法的路网MFD差异性,状态比是任意时刻路网交通参数和临界状态的距离比,某一时间间隔的交通状态比可表示路网接近或远离拥堵的距离,其公式为[7]
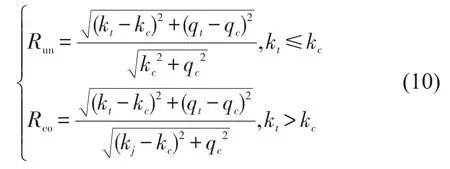
式中:Run——非拥堵状态下的路网MFD参数状态比;
Rco——拥堵状态下的路网MFD参数状态比;
kt,qt——时刻t的路网加权交通密度和路网加权交通流量;
kc,qc——路网临界加权交通密度和路网临界加权交通流量;
kj——路网阻塞交通密度,即加权交通流量为0时的路网加权交通密度.
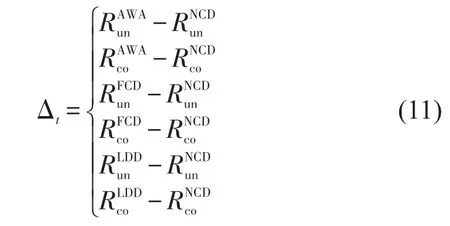
因此,路网MFD差异性可以理解为状态比的差异,定义Δt为不同估测法所得的路网MFD差异,Δt越大说明路网MFD差异越大,反之差异越小,其表达式为[7]
4 实验分析
4.1 研究路网与基础数据
本文选取广州市天河区核心路网交叉口群作为研究对象,该路网由多条主干路及部分支路组成,包括7个平面交叉口,20余个出入口,如图2所示.交通流量数据以SCATS交通信号控制系统在2017年8月6日高峰时间(18:00-19:00)所检测数据为基础.
4.2 实验过程
(1)利用Vissim交通仿真软件建立交通仿真模型,将15%车辆设定为浮动车,在各路段中间位置设置检测器,将100%车辆设定为联网车(特殊的浮动车),构建车联网环境交通模型,利用仿真软件的Vehicle Record功能,每隔15 s读取每辆车的数据采集时间T,车辆编号N,所在路段编号Lnum,速度Speed,车头XY坐标位置等交通数据,用于获得自适应加权平均数据融合模型的校验数据.为了模拟路网从低峰—高峰—拥堵的整个过程,在该路网仿真模型中,以实际交通数据为基础,模拟交通流从低峰开始,路网边界各路段驶入交通量每隔900 s增加100 veh/h,直至高峰的过饱和状态,共仿真30 000 s,每隔300 s采集1次数据,共采集100次数据.
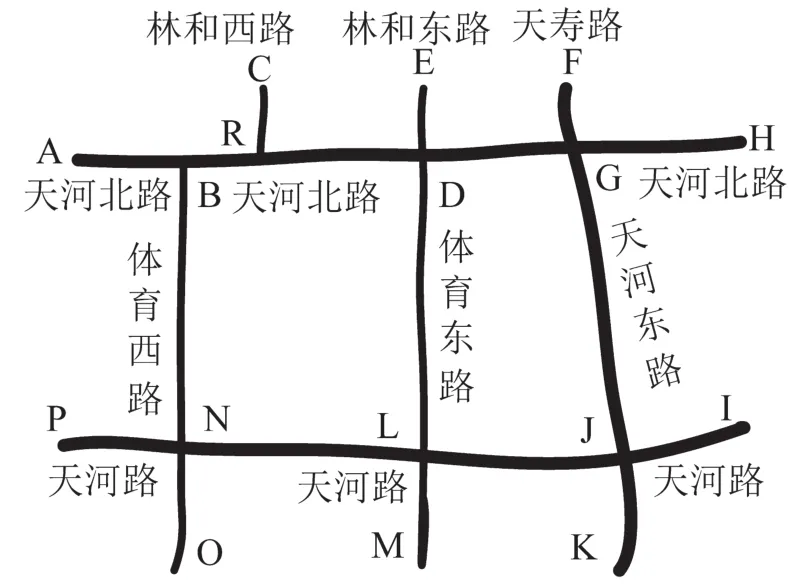
图2 天河区核心路网布局图Fig.2 Layout of Tianhe District core road networks
(2)假设浮动车和联网车每隔15 s上传车辆数、行驶时间、行驶距离等数据,依据FCD估测法,计算每隔300 s的浮动车路网加权交通流量qFCD、浮动车路网加权交通密度kFCD、联网车路网加权交通流量qNCD、联网车路网加权交通密度kNCD;同样每隔300 s采集各路段检测器的路段交通密度、路段交通流量,依据LDD估测法,计算每隔300 s的路网加权交通流量qLDD和路网加权交通密度kLDD.
(3)依据自适应加权平均数据融合流程,在Matlab中编程对每个间隔时间的LDD估测法、FCD估测法所得的路网加权交通流量和路网加权交通密度进行自适应加权平均数据融合,最终得到数据融合后的各时段路网MFD路网加权交通流量和路网加权交通密度.
(4)分别生成基于FCD估测的路网MFDF,基于LDD估测的路网MFDL,基于自适应加权平均数据融合估测的MFDAWA,基于联网车轨迹的路网标准MFDN,生成拟合函数,计算各拟合函数的临界加权交通密度,临界加权交通流量,对各种估测法所得的路网MFD进行差异性分析.
4.3 实验结果分析
对100个周期的qAWA、qFCD、qLDD、qNCD进行数据对比,如图3所示;对100个周期的kAWA、kFCD、kLDD、kNCD进行数据对比,如图4所示.
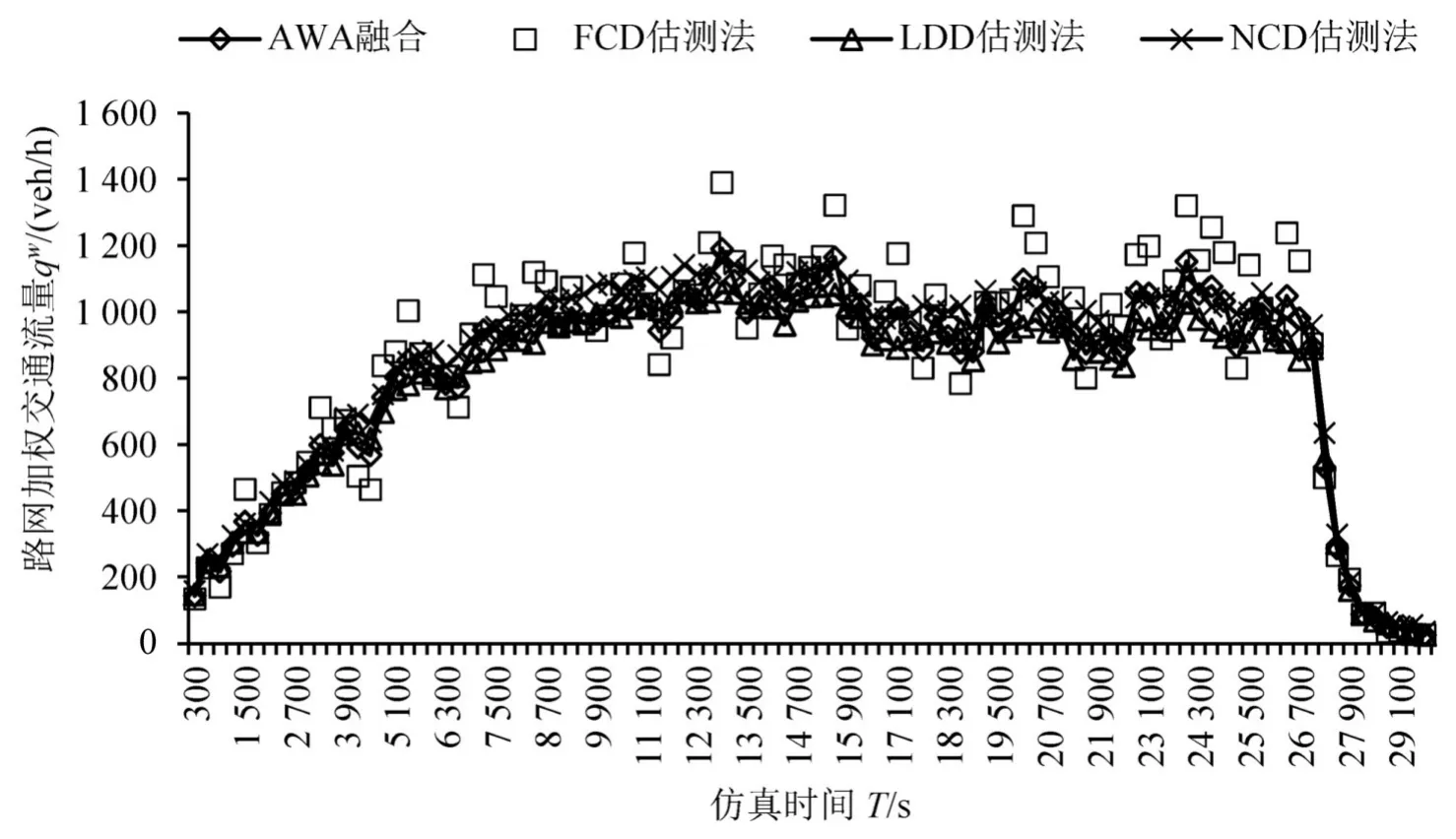
图3 各种估测方法的路网加权交通流量对比Fig.3 Comparison of road networks’weighted traffic flows obtained by various estimation methods
从图3和图4可知,FCD估测法所得的路网加权交通流量和路网加权交通密度变化幅度较大,这是因为浮动车数量较少;LDD估测法和车联网估测所得的路网加权交通流量和路网加权交通密度变化较为稳定,且变化趋势较为一致,随着仿真时间的推移,路网加权交通流量和路网加权交通密度逐渐增大,然后在一段时间内维持较稳定的值,接下来又急剧下降,但LDD估测法所得的路网加权交通流量和路网加权交通密度均小于NCD估测的路网加权交通流量和路网加权交通密度,这是因为当到达数据采集间隔时,少部分车辆尚未 到达固定检测器.
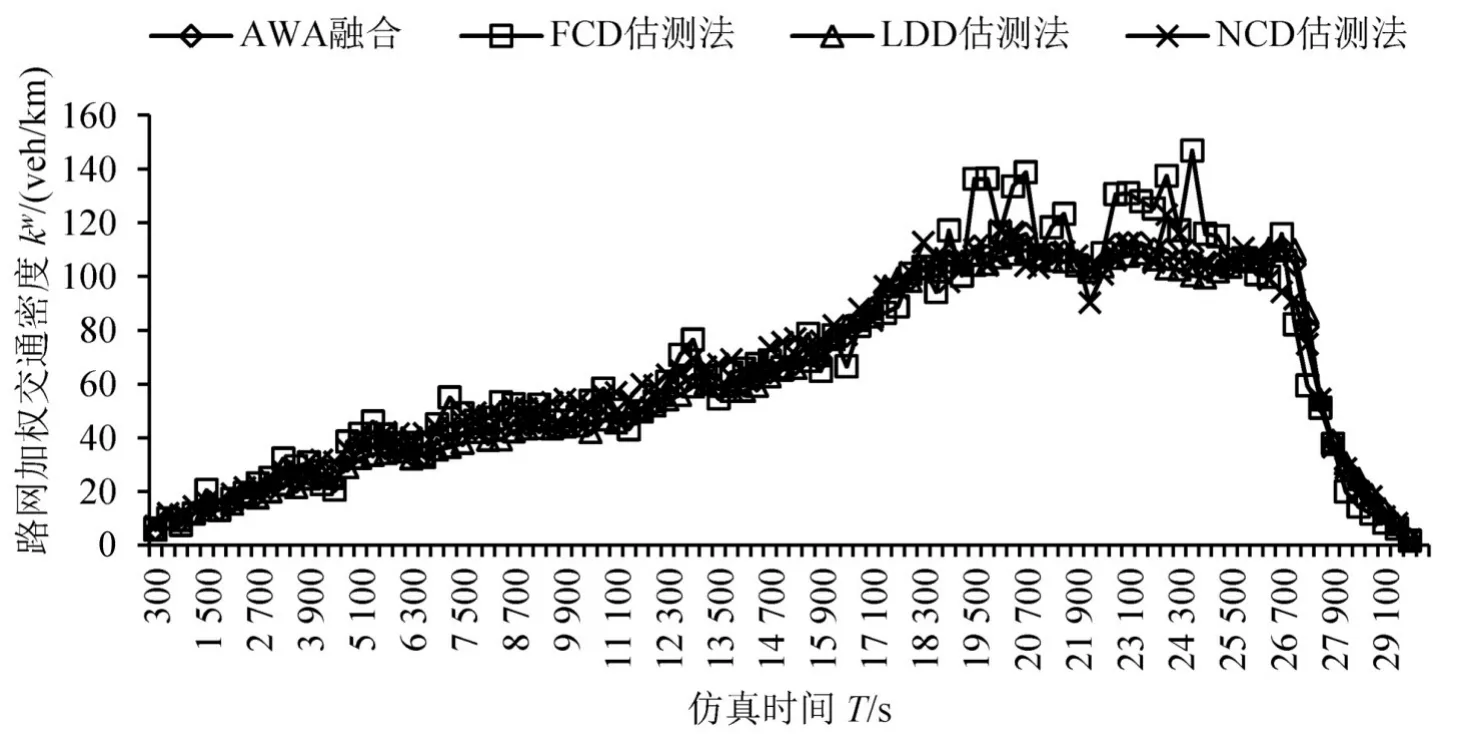
图4 各种估测方法的路网加权交通密度对比图Fig.4 Comparison of road networks'weighted traffic densities obtained by various estimation methods
分析仿真数据,得到qAWA、qFCD、qLDD与qNCD的平均绝对相对误差,以及kAWA、kFCD、kLDD与kNCD的平均绝对相对误差,分别如表1和表2所示.
从表1和表2可知,qFCD和kFCD的平均绝对相对误差最大,分别为11.52%和12.26%;qLDD和kLDD的平均绝对相对误差次之,分别为8.22%和11.54%;经自适应加权平均数据融合后,qAWA和kAWA的平均绝对相对误差分别为6.51%和9.56%,最接近标准值qNCD和kNCD.
利用各种估测数据,生成基于FCD估测法的路网MFDF,基于LDD估测法的路网MFDL,基于自适应加权平均数据融合估测的MFDAWA,基于联网车轨迹的路网标准MFDN,分别如图5和图6所示.

表1 相对于qNCD的平均绝对相对误差Table 1 The mean absolute percent error relatived toqNCD

表2 相对于kNCD的平均绝对相对误差Table 2 The mean absolute percent error relatived tokNCD
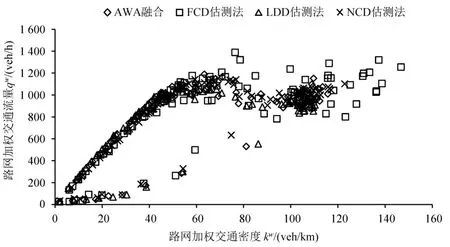
图5 各种估测方法所得的路网MFDFig.5 The MFDs of the road networks obtained by various estimation methods
从图5可知,MFDF的散点呈现较大的离散性,MFDL、MFDAWA、MFDN的散点较为集中,而且随着仿真时间的推移,路网加权交通流量和路网加权交通密度均逐渐增大,路网加权交通密度从70 veh/km开始,路网维持在较高的加权交通流量,随着路网加权交通密度增大,路网加权交通流量急剧下降,路网出现过饱和状态.同时路网MFD还出现了“回滞现象”,符合路网MFD的特性.对各MFD的散点进行数据拟合,得到拟合函数,计算各种拟合函数临界加权交通密度、临界加权交通流量和阻塞密度,如表3所示.
利用式(10)和式(11),计算各种估测方法所得的路网MFD的状态比R和差异值Δ,如图6和图7所示.

表3 各MFD的拟合函数Table 3 The fitting functions of each MFD
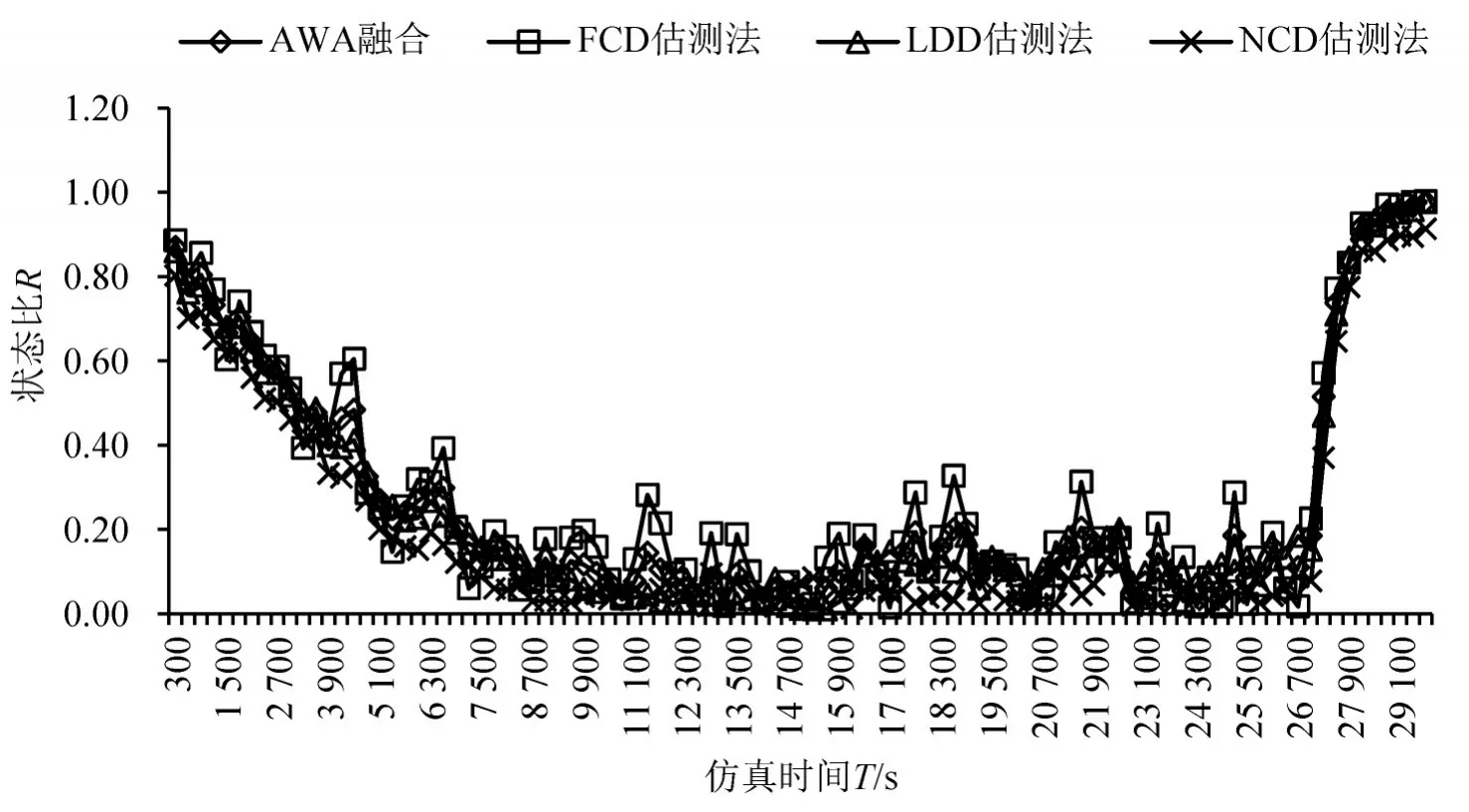
图6 各估测法所得的路网MFD状态比Fig.6 The traffic state ratios of the road network's MFDs obtained by various estimation methods

图7 各估测法与NCD法所得的路网MFD差异值Fig.7 The difference values of the road networks'MFDs obtained by various estimation methods compared with NCD estimation method
从图6和图7可知,FCD估测法的路网MFD状态比和差异值变化比较大,LCD估测法和自适应加权平均数融合的状态比和差异值变化比较稳定.计算各估测法的路网MFD差异值绝对值的均值、极大值和极小值,如表4所示.
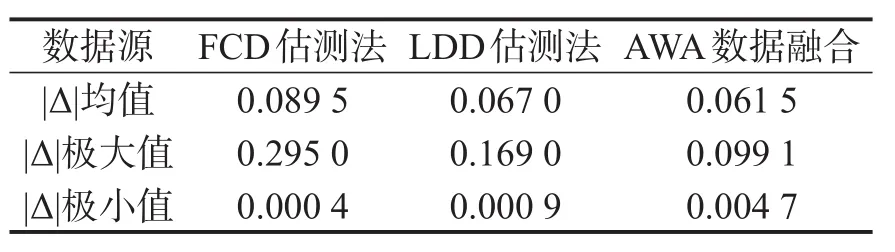
表4 各估测法与NCD估测法所得的路网MFD差异值Table 4 The MFDs’difference among each estimation methods base on NCD estimaion method
从表4可知,FCD估测法所得的路网MFD差异最大,|Δ|均值为0.089 5,LDD估测法和AWA数据融合法所估测的路网MFD差异较小,但AWA数据融合法所估测的路网MFD更接近标准路网MFD,其|Δ|均值为0.061 5.由此可见,自适应加权平均数据融合后的路网MFD更加准确.
5 结论
利用路网MFD,能从宏观层面对路网进行监视与控制,提高路网的运行效率,但准确估测路网MFD是MFD应用的前提.本文所提出的基于自适应加权平均数据融合MFD估测方法能有效地将LDD估测方法和FCD估测方法结合起来,更加准确地估测路网加权交通流量和路网加权交通密度,从而得到更加准确的路网MFD,为后续MFD在路网边界控制、路网拥挤收费、路网资源分配、路网评价等方面的应用奠定了基础.
猜你喜欢
军民两用技术与产品(2022年8期)2022-10-10
中国外汇(2019年19期)2019-11-26
建材发展导向(2019年11期)2019-08-24
制造技术与机床(2018年11期)2018-11-23
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2018年7期)2018-09-14
制造技术与机床(2017年9期)2017-11-27
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
中国医学装备(2016年6期)2016-12-01