
一种杆状交通设施点云自动提取的方法
2019-01-03 09:07孙春生
城市勘测 2018年6期
孙春生
(南京捷鹰数码测绘有限公司,江苏 南京 210019)
1 引 言
杆状交通设施是重要的基础道路设施,其信息的快速获取在道路资产调查、自动驾驶和辅助驾驶等领域发挥重要作用。激光点云是激光扫描设备进行测绘作业所采集的数据成果,它蕴含着丰富的三维空间信息,有利于我们从中提取杆状交通设施。同时,激光点云数据海量存在遮挡和密度不均等问题严重影响了杆状交通设施的提取[1]。目前基于激光点云的杆状交通设施目标提取方法主要分为基于体素和基于对象两种方法。基于对象的方法主体思想是将点按一定准则合并成一个个对象,直接以每个对象进行分析,判断其是否为所需要提取的目标。由于点云场景复杂和噪声的影响,基于对象方式所提取的杆状交通设施结构较为完整,更适合用于杆状交通设施形态和要素的提取[2]。
2 点云预处理
2.1 基于局部最低高程的地面点云移除
由于激光扫描系统的无差别特性,获取的激光点云中含有大量的地面点。本文的研究目标是非地面的杆状交通设施,所以地面点并不是兴趣目标,为了提高效率可以将这些地面点移除。另外,地面点将非地面点连接在一起,很难分开。因此首先选择对原始激光点云数据进行滤波,移除掉地面点。地面点的滤波是国内外激光点云数据处理的研究热点之一[3],主要分为基于斜率、基于形态学、基于表面和基于分割的滤波方法。由于兴趣目标是非地面的杆状交通设施,移除地面的目标是为了使非地面不同地物相互分离,所以并不需要对地面点进行精细的滤波,从局部区域来看,可以假设最低点为地面点。将激光点云划分成若干个二维网格,在每个网格中最低高程的点可以假设成地面点,到最低点高差在一定范围内的点都可以认为是地面点,反之则为非地面点。
2.2 基于欧式距离的非地面点云聚类
地面点滤波算法能有效滤除了地面点。失去了地面点的约束后,非地面目标之间空间距离差异更加明显,因此可以根据点与点之间空间距离的远近聚类成不同的对象。基于欧式距离的聚类算法是目前最通用的空间聚类方法之一,比较每个点和其邻域点的空间距离来判断是否为同一集群,并利用KD树组织和检索点云,实现将离散的、信息较少的非地面点向聚合的、信息丰富的点云对象转变。
3 混合点云的检测与分割
基于欧式距离的聚类算法受激光点云数据中噪声的影响较大,有的点云对象只包含一种地物目标,而有的点云对象则混合了多种地物目标,我们暂且将后者称为混合点云。如果混合点云中存在杆状交通设施,将会增大杆状交通设施提取的难度,所以需要对混合点云进行处理。目前主要利用图割理论[4]的方法,进一步对混合点云分割,实现混合地物的分离。但混合点云可能含有多个目标,仅仅分割一次难以得到理想的效果。这里提出一种基于迭代最小割的混合点云检测与分割方法,可以自动检测混合点云并对其进行分割。算法流程图如图1所示。

图1 混合点云检测与分割示意图
杆状交通设施高度较为明显,高度越高的点云对象越有可能含有杆状交通设施,而且混合点云对象投影到水平面的面积往往较大。通过计算每个候选点云对象的最小外包盒,得到每个候选点云对象的高度和水平投影面的面积,当候选对象高度大于某一阈值且水平投影面积大于某一阈值时,认为该对象是混合点云,需要进行进一步分割。最小割是图割中最经典的算法之一,它利用最小割的准则对全局能量函数进行求解,达到全局最小化,使分割以后的两个区域相似性最小。对于混合点云目标,同一地物内部相似性较大,不同地物之间相似性较小,所以本文采用最小割算法,实现从混合点云中提取杆状交通设施。对于检测出的混合点云,利用文献[4]中的能量函数,并利用最小割算法对能量函数进行求解。最小割的目标就是让所有边的权值之和最小。因为杆状交通设施总是明显要高于周围的其他地物,所以和其他地物的重叠混合多半发生在杆状交通设施的底部,混合点云顶部为杆状交通设施的可能性较大。首先将混合点云沿Z轴方向分成10段,将最高的两段内的点作为前景点,计算平滑函数跟代价函数将混合点云分割成前景和后景两部分。对于分割完的两个点云,计算两者的外包盒进行混合点云的检测,通过迭代的方式反复进行分割,直到没有任何候选点云结束分割。
4 杆状交通设施检测
通过点云预处理和混合点云的分割,原始激光点云中的杆状交通设施聚合成了独立的点云对象。然而,提取的点云对象中除了杆状交通设施以外,还包括如建筑、树木、栏杆和车辆等其他地物对象,有些地物与杆状交通设施形态相似,需要对其进行甄别[5]。为了将杆状交通设施和其他地物区分开来,我们设计了一种结合先验知识和形状知识的层次滤波器,用于检测杆状交通设施。
4.1 基于先验知识的杆状交通设施检测
杆状交通设施往往需要一定高度保证其正常履行交通职能。所以,高度较高的点云对象才有可能是杆状交通设施。本文基于此先验知识,设置了一个高度滤波器,将高度高于最小高度阈值的点云对象作为潜在杆状交通设施备选并送入形状滤波器进行筛选。
4.2 基于形状知识的杆状交通设施检测
不同的杆状交通设施的形状虽然有差异,但也有共同点,即它们都有垂直的杆状结构,而且与散乱的自然树木相比,杆状交通设施形状更加规则。如果要确定一个杆子的形状,首先要确定它的半径和高度。此外,还要保证杆子的均匀性,即各个连续剖面的半径不能变化太大。基于此形状知识构建形状滤波器用于检测杆状交通设施,主要分为横断面分析和离散度检测两个部分。
5 实验与分析
5.1 实验数据
实验数据是利用Trimble TX8激光扫描仪采集的常州武进区龙江高架和长虹高架互通处点云,南北长约 3 km,东西长约 2 km。如图2所示,测试数据中含有丰富的道路、建筑、树木、栏杆、车辆和交通设施等地物信息。通过人工标记的方式统计,实验数据中路灯、路牌、监控探头等杆状交通设施共645个。

图2 实验场景激光点云示意图
5.2 参数设置
由于点云场景的复杂性,经过分割之后会存在很多过分割的地物碎片,为了移除这些细小的地物碎片设置最小高度阈值th。同时经过同一场景反复测试,对相邻切片最大对角线长度差ld、增长切片最小高度ph、最大对角线长度td和最大离散度阈值tSc等参数进行设置,具体阈值如表1所示。

点云分割提取参数阈值 表1
5.3 评价指标
本文利用准确度P、完整度R和F1测度三种定量化指标评价杆状交通设施的提取结果。它们的定义如下:
(1)
(2)
(3)
其中,TP表示检测出来的正确杆状交通设施,FP表示检测出来的非杆状交通设施地物,FN表示没有检测出来的杆状交通设施。所以准确度P可以定量评价提取的准确性,完整度R可以定量评价提取的完整性。F1作为准确度和完整度组合的评价指标,是对提取方法的综合评价。
5.4 实验结果
实验点云通过上述方法进行杆状交通设施提取,其中正确596个,错误33个,遗漏49个。依据上述评价指标评价结果如表2所示。

实验点云分割提取的结果与评价指标 表2
6 小 结
在实验分析中,该方法能够自动提取出绝大部分的杆状交通设施,但由于场景的复杂性,一些不完备的杆状交通设施,它们无法被欧式聚类成一个完整的点云对象,难以用基于对象的方法提取。同时,如图3中所示,仍然存在一些非杆状交通设施被错误提取的现象,例如部分只含有少量树叶的粗细较均匀的树桩同杆状交通设施结构相似,因此它们被错误地提取成杆状交通设施。另外,该方法仅适用于在底部重叠的混合场景,其他顶部混合等场景则效果较差。
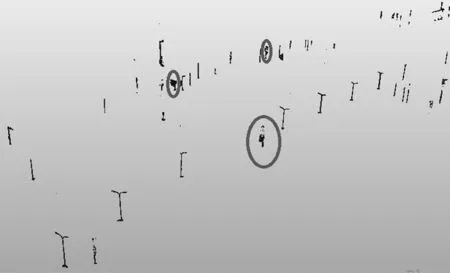
图3 实验场景激光点云杆状交通设施提取局部图
猜你喜欢
湖南税务高等专科学校学报(2021年4期)2021-08-30
建材发展导向(2019年6期)2019-11-28
制造技术与机床(2019年9期)2019-09-10
西南交通大学学报(2018年6期)2018-12-18
意林(2018年3期)2018-03-02
河北遥感(2017年2期)2017-08-07
厦门理工学院学报(2016年1期)2016-12-01
衡阳师范学院学报(2016年3期)2016-07-10
工业设计(2016年11期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
