
基于三维激光扫描技术的变形监测方法研究
2019-01-03 02:03简锐敏
西部资源 2019年3期
简锐敏
摘要:三维激光扫描技术不需要合作目标就能自动、快速、连续地对被扫描物体进行整体监测,并能准确生成三维立体模型,从而真实描述扫描对象的整体结构及形态特性,弥补了传统变形监测的片面性和局限性。本文以广佛肇高速公路鼎湖山隧道监测项目为例,介绍了三维激光扫描技术的原理方法,并与传统监测方法进行数据比对,为三维激光扫描技术在变形监测中的推广应用提供借鉴。
关键词:三维激光扫描;变形监测:点云数据:噪声点
1.引言
目前,常规的变形监测手段主要是利用全站仪、GPS进行多点监测,即针对监测体上的重要位置设定监测点进行连续观测的方法。由于该种手段的监测点较少,测量值仅能代表局部变形的情况,难以反映出整个监测体的变形特征和过程,而且在地形复杂地区布设监测点十分困难,危险系数非常大,不仅增加了外业工作量,获取成果的周期又很长,大大影响了变形监测的效率。随着三维激光扫描技术的日趋成熟,利用其高精度、高密度点云数据进行变形监测成为一种良好的途径,其不需要合作目标就能自动、快速、连续地对被扫描物体进行整体监测,并能准确生成三维立体模型,真实描述扫描对象的整体结构及形态特性。
2.三维激光扫描技术原理分析
2.1三维激光扫描技术原理
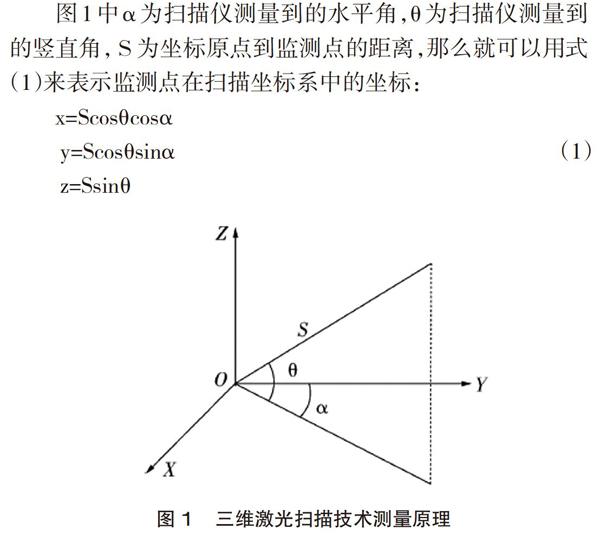
三维激光扫描技术是继GPS(全球定位系统)技术之后兴起的一项高新测量技术,它于20世纪90年代中期逐渐发展成熟,其原理和全站仪测距测角的原理类似,不同点在于三维激光扫描技术采用非接触方式,通过发射高速激光束测量物体的表面信息,同时自动记录大量的密集点云数据,再通过计算可大面积、高分辨率地快速复建出被测物体的空间点位信息并构建三维模型,因此它又被称作为“实景复制技术”。三维激光扫描仪采集到的点云数据是以扫描坐标系为基准的,扫描坐标系的定义为:以发射激光束处为该坐标系原点,X轴为扫描仪水平转动轴的零方向,Z轴为扫描仪水平时的天顶方向(理论竖直轴),Y轴与X轴、Z轴成右手坐标关系,三维激光扫描技术测量原理如图l所示。
图l中a为扫描仪测量到的水平角,θ为扫描仪测量到的竖直角,S为坐标原点到监测点的距离,那么就可以用式(1)来表示监测点在扫描坐标系中的坐标:
x=Scosθcosa
y=Seosθsina
z=Ssinθ
2.2数据采集方法
三维激光扫描仪采集目标数据可以分为整体采集和局部采集两种方法,整体采集时扫描仪采集事先布设的公共点或标靶数据,再通过后处理软件拼接测站,此方法可以整体扫描目标物并获取物体的三维激光点云数据。局部采集是通过将三维激光扫描仪架设在基准站上,再对特定的范围进行三维扫描,作业前应参照现场的情况和仪器的性能参数,首先设计出基准站间的距离以及扫描点的密度,以保证扫描点有一定的重叠度,基准点再通过常规导线和水准测量来传递三维坐标。
2.3数据分析与处理
采用数据后处理软件对三维激光扫描获取的数据进行专业化处理,处理步骤主要包括:点云数据的去噪、拼接点云数据、坐标转换、将点云数据建模并进行3D分析比较。
(1)当采用整体采集的方法时,通过事先布设的公共点或标靶进行相邻测站的拼接,这样所有测站的点云数据就统一到同一个坐标系中。当采用局部采集的方法时,各测站的点云数据不需要进行拼接,这样就可以避免由于拼接点云数据产生的误差。(2)在三维激光扫描仪采集数据时,因某些原因,不可避免会产生一些没用的噪声数据,利用专业软件将点云数据进行去噪处理,并减少数据冗余量。(3)在进行点云数据扫描作业时,利用GPS联测三个或三个以上已知点,将三维扫描数据转换成当地坐标,这样就把扫描获得的点云数据统一在相同的坐标系中,为后期进行数据比较和三维建模提供方便。(4)通过后处理软件分析比较扫描的点云数据,运用不同的颜色来直观的显示出变形区域,可从宏观方面开展变形分析。(5)提取不同监测时期的标靶中心以及监测点的坐标值,通过计算相邻两期坐标值的较差来分析监测点的水平位移变化以及垂直位移变化,方便从微观方面開展变形分析。 3.实例分析 以广佛肇高速公路鼎湖山隧道变形监测项目为例,采用瑞士徕卡ScanStation2三维激光扫描仪进行本次监测,该扫描仪每秒最大扫描976000点,25m范围内的系统距离误差小于±2mm。主要作业步骤包括点云数据采集和处理两个方面,其中,关键是利用eyelone5.8软件进行数据处理以及GeomagieStudio软件开展变形宏观及微观分析。
3.1采用三维激光扫描仪变形监测
本项目采用整体采集的方法,将三维激光扫描仪的质量设定为4X,分辨率设定为1/5,考虑到采集精度和有效作业距离,相邻测站间距设定为30m左右,以同样的参数和方法分别采集了三期的监测数据,并利用eyelone5.8后处理软件进行测站拼接,并剔除一些没用的噪音数据,处理完成后将点云数据输出为文本格式,再利用GeomagieStudio软件将三期采集的点云数据分别进行三维建模(如图2所示),建成的三维模型再进行3D模拟对比分析,即将前后两期的三维数据模型进行配对比较,在模型上计算出两个模型之间的差值,此差值即为监测体的变形量,再利用不同的颜色将变形部位显示出来,可从宏观及微观两方面进行变形分析。通过对比分析得出,整个隧道的水平位移平均值为7.lmm,累计沉降平均值为7.3mm。
3.2采用传统方法变形监测
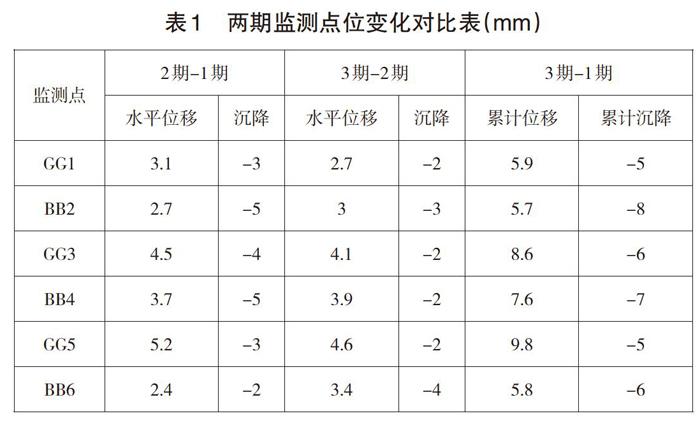
为了验证三维激光扫描仪的监测精度,我们采用全站仪和四等水准测量的传统方法对布设的6个公共点和标靶点同时进行了三期监测,原理方法不做赘述。监测成果如表1所示。
3.3数据分析比对
从表l数据可以看出,利用传统方法进行监测的6个公共点和标靶点的水平位移平均值为7.7mm,累计沉降平均值6.2mm,经统计,两种方法监测的水平位移差值只有0.6mm、累计沉降差值只有l.lmm,监测精度完全满足要求。通过本次监测,可以得出:本次监测的水平位移量和累计沉降量都在规范要求的范围内,且区间的变形趋于稳定状态。
4.结语
(1)与传统的变形监测方法相比,基于三维激光扫描技术的变形监测在数据获取和数据处理的方法上都有着本质的不同,其具有采样速度快、高精度、高分辨率、整体监测的特点,极大地提高了监测工作的效率,同时也改善了监测人员的作业环境。(2)三维激光扫描技术应用于变形监测的不足之处:在变形监测过程中,三维激光扫描仪与监测点之间仍需通视,基准站设置的自由度不高;采集的点云数据中含有大量的噪声点,影响了数据的质量。相信随着变形监测理论的不断发展和完善,再有效结合InSAR等新技术,三维激光扫描技术在变形监测领域必将具有良好的应用前景。
参考文献:
[1]徐源强,高井祥,王坚.三维激光扫描技术[J].测绘地理信息,2010,35(4):5-6.
[2]倪曙,喜文飞,张鸣宇.三维激光扫描仪在变形监测中的研究与应用[J].甘肃科学学报,2013,25(2):103-108
[3]蔡来良,吴侃,张舒.点云平面拟合在三维激光扫描仪变形监测中的应用[J].测绘科学,2010,35(5):231-232.
猜你喜欢
科技创新与应用(2017年3期)2017-02-18
建筑建材装饰(2016年12期)2017-01-19
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
绿色科技(2015年6期)2015-08-05
