一种高精地图道路三维线形测量方法
2019-01-07 00:57罗文婷
测绘通报 2018年12期
罗文婷,李 林
(福建农林大学交通与土木工程学院,福建 福州 350000)
大数据基础下构建三维高精地图是自动驾驶不可或缺的一部分[1]。传统地图并不能满足自动驾驶的需求,主要由于:①局部更新较难,无法及时反映高频率的道路改、修、扩建[2-3];②地图精度较低,无法满足自动驾驶操作的要求[4-5];③二维地图无法立体反映多层车道交互重叠关系[6]。目前国内外众多学者及研究机构对自动驾驶高精地图展开了深入研究。这些研究主要利用惯导系统、激光雷达、全景相机等车载设备采集道路信息数据,通过相应算法提取道路线形信息,从而构建高精地图[7-10]。惯导系统是目前最广泛采用的测量设备,主要通过采集车行驶轨迹来提取道路线形信息[11-13]。这种方法采集效率高,数据更新便捷,能采集道路横纵坡度等三维线形信息[14-16]。通过方位角变化规律定位平面线形中的圆直/直圆点,利用倾斜角、俯仰角标定道路横纵坡度[17-18]。Imran提出了一种通过多辆车行驶轨迹获取道路线形信息的方法[19],但如果普遍行驶轨迹发生偏移,其所获取的道路线形信息仍存在一定误差。
综上所述,目前高精地图绘制技术在区域覆盖、更新频率、地图精度上都较传统GIS地图有较大提升,然而受采集车自身颠簸、行驶偏移的影响,获取的道路线形信息准确度仍有待提高。本文采用惯导系统及LiDAR系统获取道路信息,利用采集车行驶中的倾角及车轮运转距离描绘车辆行驶轨迹,并结合激光点云数据进行道路线形信息的提取校正。
1 数据采集
1.1 数据采集设备
本研究采用数据采集设备如图1所示。惯性测量单元安装于采集车两轴的中心位置,可测量车辆在运行过程中x、y、z轴方向的倾角及加速度变化。轮距测量仪安装于采集车左后轮,用于测量车轮的运转距离,同时与惯性测量单元及LiDAR系统相连,并向其发送脉冲值。三维LiDAR系统由两组激光发射器及8组三维激光相机构成,分两组悬挂于采集车尾部两侧,两组设备间相距2 m,距离地面1.65 m。三维LiDAR系统能够在高速(100 km/h)状态下采集2D/3D激光数据,数据覆盖宽度为4 m。
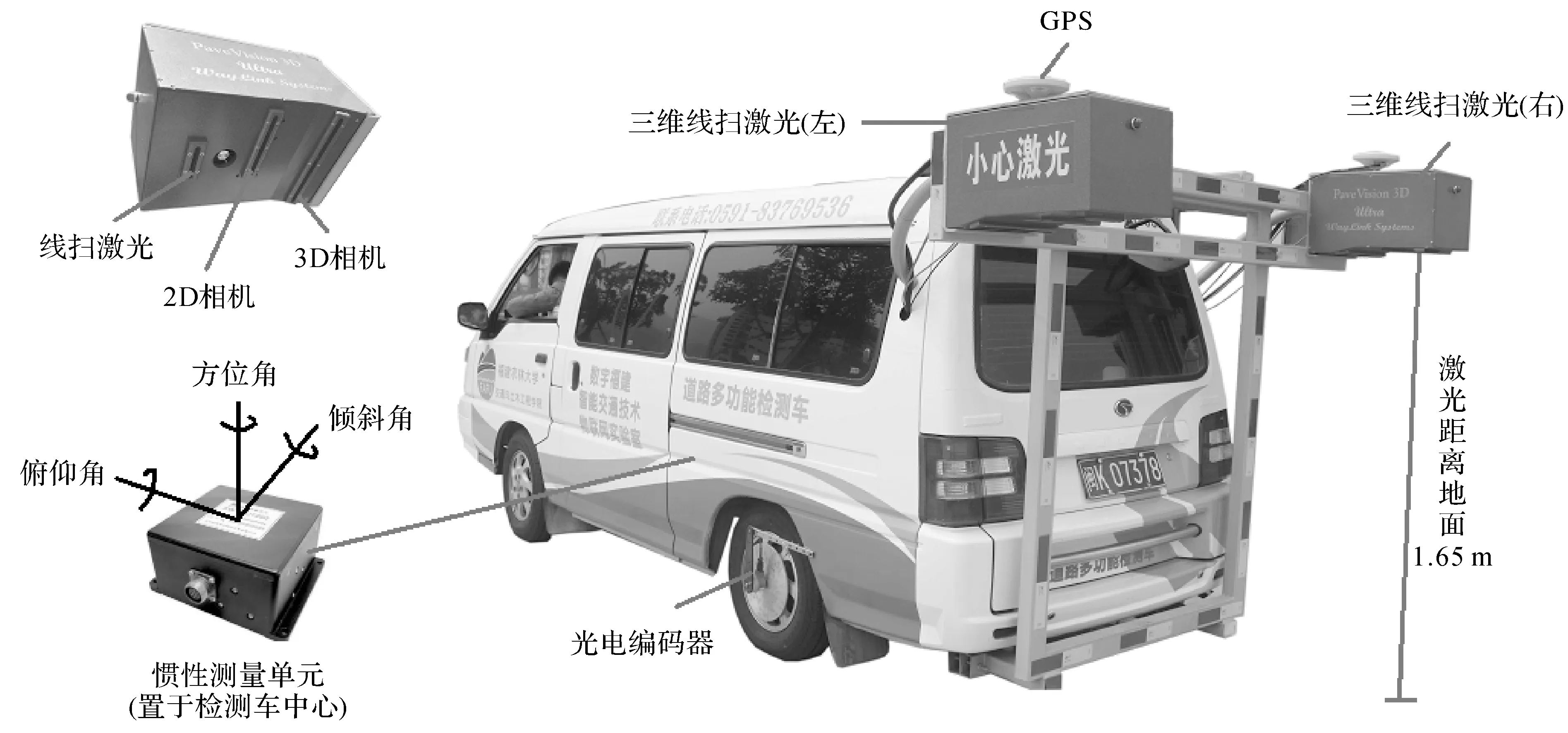
图1 数据采集车外观及车载设备架构
1.2 数据采集规划
本文采集了福州市浦上大桥互通式立交各车道及匝道的三维线形数据,包括圆曲线匝道7条、直线车道9条。每次数据采集均以同一起点为坐标原点。经过原点标定后,可消除复杂的车道及匝道拼接工作,对不同批次采集的数据进行坐标统一。
2 道路线形信息的提取算法
2.1 车辆横向偏移位移的测量计算
采集车在行驶过程中的横向偏移,会导致行驶轨迹偏移车道中心线。研究利用路面二维图像数据进行车道边缘线识别定位,通过其在图像上的坐标位置,标定采集车相对于车道中心线的偏移位移。具体方法叙述如下。
2.1.1 路面二维激光图像二值化
在二值化处理中,如果阈值过小,不能找出边缘线;如果阈值太大,则造成二值化图像中的噪音(非目标对象)增加,进而加大边缘线识别难度[20-21]。本研究利用改进大津法进行图像二值化处理,阈值的具体计算见式(1)。车道边缘线原图如图2(a)所示,二值化处理实施效果如图2(b)所示。
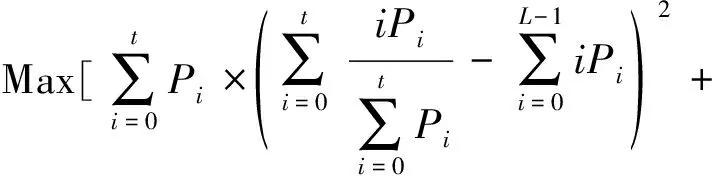
(1)
式中,Pi为灰度值为i的像素数在像素总数所占比例;t为分割阈值,取值范围为0~L-1。
2.1.2 车道边缘线缺损填充
由于车道边缘线的陈旧及脱漆,二值化处理生成的车道边缘线会存在脱空或不连续现象,如图2(b)所示。为填补边缘线的脱空及不连续区域,采用膨胀后腐蚀算法,该方法通过选择合适的结构元素,对二值化图像进行卷积运算,进而填充边缘线内部空洞,连接不连续的区域,使其更加平滑完整。其实施效果如图2(c)所示。
2.1.3 车道边缘线识别定位
利用Canny算法对图2(c)中的车道边缘线进行边缘检测。对其边缘进行基于非零像素值的闭环遍历,确定边缘线的几何轮廓,并根据几何轮廓的形状及尺寸,剔除非边缘线的噪音影响。最后,根据几何轮廓及尺寸,确定边缘线的坐标位置。其实施效果如图2(d)所示。

图2 车道边缘线自动识别
2.1.4 采集车横向偏移位移计算
激光路面图像中心线可定义为采集车行驶轨迹中心,结合车道边缘线坐标位置,可获取车道中心线轨迹。由于车辆偏移及边缘线虚线段的存在,图像所捕获的车道边缘线会出现3种情况:双侧边缘线均被捕捉、仅单侧边缘线被捕捉、双侧边缘线均未被捕捉。针对不同情况,行驶偏移量的测量如图3所示。首先在双侧边缘线被捕捉的图像上计算车道宽度,根据车道宽度计算单一边缘线图像中的车辆偏移;双侧边缘线均未被捕捉时,鉴于行驶轨迹的连续性,取前后图像偏移位移的均值作为该张图像的车辆偏移位移。
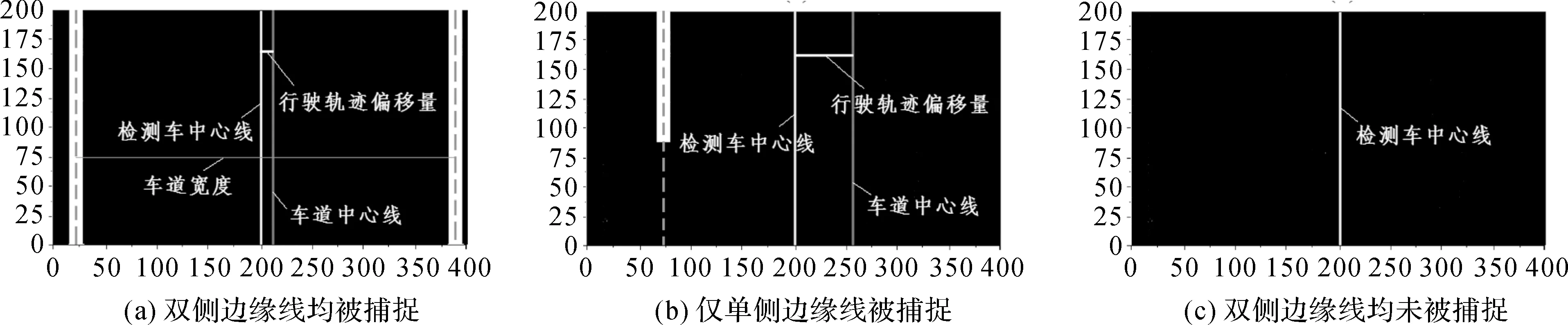
图3 偏移量的计算
2.2 道路平面行驶轨迹的提取校正
利用惯导系统采集的方位角数据及轮距测量仪记录的轮轴运转距离,描绘采集车平面行驶轨迹。参照采集车行驶轨迹及其相对于车道中心线的偏移位移,获取车道中心线平面线形轨迹为
(2)
(3)

2.3 圆曲线段线形要素的测量计算
2.3.1 平面线形变化分界点识别定位
本文利用线性拟合算法消除采集车方位角过渡变化的影响,从而确定圆直/直圆点的精确位置。该方法包含以下具体步骤:①在过渡段间任选一节点为候选节点进行标记,如图4(a)所示;②以候选节点为参照,移除其前后若干个方位角样本数据,如图4(b)所示;③对被切断的若干近似直线的数据片段进行线性拟合,并延长拟合直线使其相交。依据交点的横坐标,标记道路平面线形变化的分界点,如图4(c)所示。
2.3.2 圆曲线半径测量计算
本文在已获取的车道中心线轨迹及圆直/直圆点的精确位置基础上,结合弦线支距法计算车道的圆曲线半径为
(4)
2.4 道路横纵坡度的测量校正
2.4.1 道路横坡度的测量校正
本文利用三维LiDAR系统对横坡度原始测量值进行校正。三维LiDAR系统对称平行悬挂于采集车尾部的两端,其所采集的路面横剖线坡度反映了采集车与路面间的夹角γ。结合测量所得的θ和γ角,可计算道路真实横坡度值为
(5)
式中,γ为路面与采集车间的夹角;θ为采集车相对水平面的横向倾角;e为路面横坡度;yL为激光点云数据左边缘路面高度信息;yR为激光点云数据右边缘路面高度信息;W为路面宽度。
在实际的呼吸功能训练环节主要采用以下手段对患者进行辅助。分别为:缩唇呼吸、腹式呼吸以及前身放松训练等。根据患者的实际情况来对具体的康复训练手段进行选取。首先患者需要模仿护理人员示范的呼吸方式,引导患者进行加深呼吸的训练。其频率不应太快,应保持在每分钟十六至十八次,整个过程也应保持在二十至三十分钟之间。除此之外,鼓励患者进行一定的肢体运动。例如双臂的前后上下活动便是其中十分有效的一种,这个过程对于护理人员的要求便是在患者无力的情况时,辅助患者进行相关运动的开展。该环节的持续时间应保持在三分钟左右,每天进行的次数约为六到十次。
2.4.2 道路纵坡度的测量校正
道路不平整会引起车辆颠簸,导致数据噪声波动。双边滤波法具有保边去噪的效果,即仅除去局部数据噪声而保留数据自身特性。因此本文采用该算法消除纵坡度原始数据噪声,校正车辆颠簸带来的误差。
3 三维高精地图的构建
结合提出的一系列道路线形要素自动提取校正算法,将研究采集的浦上大桥互通式立交道路信息数据进行整理,绘制精度为10 cm的三维高精地图,其绘制过程主要包括:车道中心线平面轨迹的提取、平面底图的绘制、三维线形信息的导入。
3.1 车道中心线轨迹的提取
共进行了4次数据采集。首先提取并校正采集车各批次的平面行驶轨迹;然后以各批次数据的同一坐标原点为参照,将不同批次的平面行驶轨迹数据在同一坐标系上叠加;最后对叠加生成的行驶轨迹图层进行修剪,去除由于绕道重复采集的车道及匝道信息。
3.2 平面底图的绘制
提取车道中心线轨迹信息,定位圆直/直圆点,计算圆曲线半径。以车道中心线为基准,依据所测车道宽度,定位车道边缘。根据路面二维激光图像上所获取的道路标线信息及其坐标位置,在高精地图平面底图上进行添加。图5为浦上大桥互通式立交高精地图平面底图,其中圆直/直圆点经纬度坐标、圆曲线半径信息及车道标线均在底图上进行了标注。
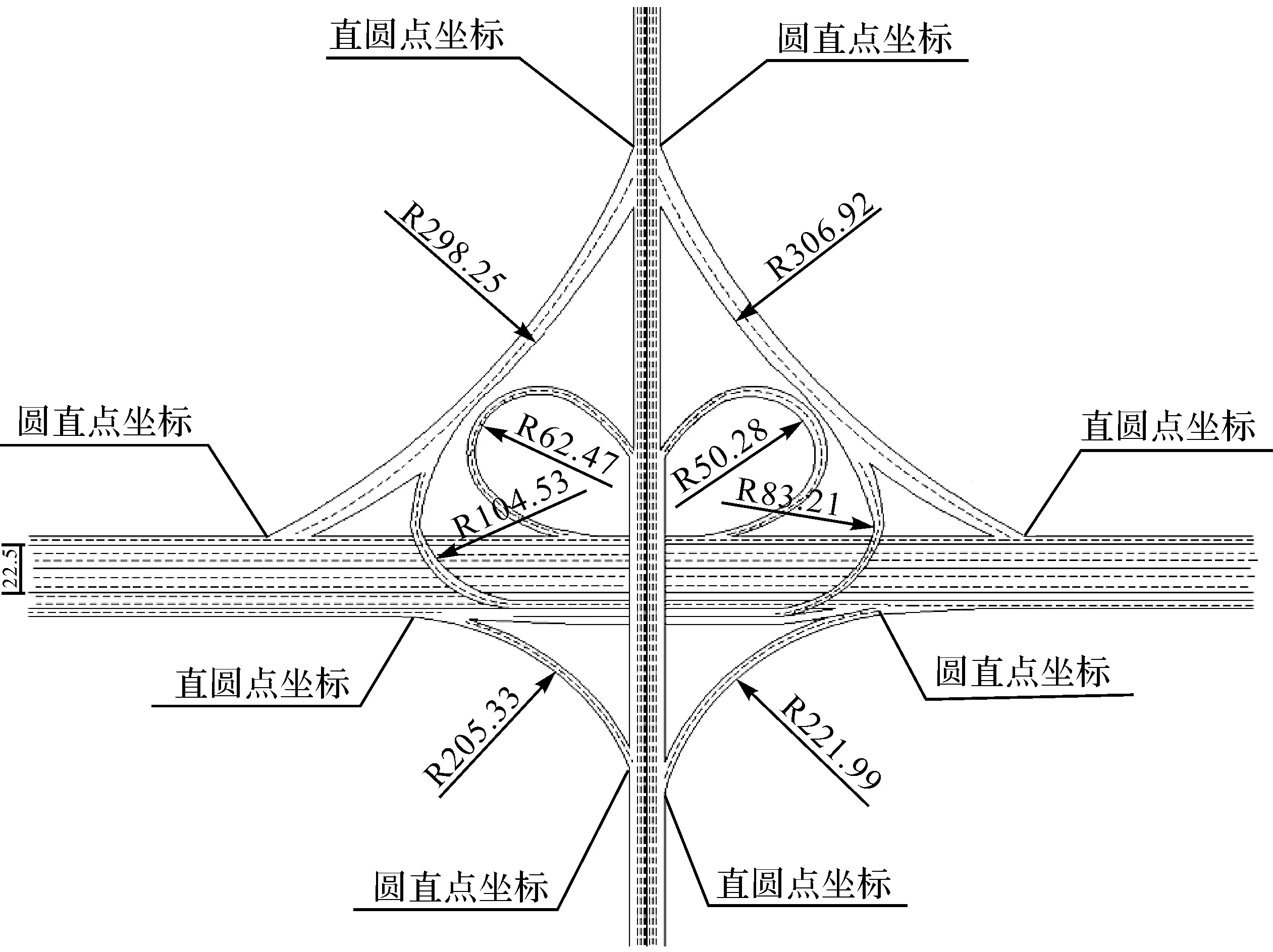
图5 高精地图平面底图
3.3 三维线形信息的导入
三维高精地图是在平面底图基础上,结合车道横纵坡度信息,添加车道上各点的Z轴坐标来搭建实现。主要包括3个步骤:①面底图微元单元格坐标构建:将车道平面划分为微元单元格,确定每个微元单元格平面坐标。本文采用10 cm×10 cm微元单元格,将平面底图转化为点云数据。②车道纵坡度信息的添加:以平面底图的坐标原点为起点,将车道中心线各点纵坡值换算成Z轴方向高度信息。标记车道中心线所在的单元格,导入车道中心线各单元格Z轴坐标。③车道横坡度信息的添加:结合车道中心线Z轴坐标值与车道横坡度,计算并导入车道横剖线上各单元格Z轴坐标(高度信息)。
4 精准度验证试验
4.1 平面线形要素测量结果验证
在圆直/直圆点附近,将3 m直尺与道路切线段标线重合。平移3 m尺,直至直尺与标线分离,将分离点确定为圆直/直圆点。圆曲线段内随机选取两点,通过全站仪测量两点间的弦线及支距长度,利用弦线支距法计算圆曲线半径。
4.1.2 平面线形要素精准度验证结果
将人工测量的圆直/直圆点位置信息作为参照值,计算高精地图中圆直/直圆点相对于参照值的偏差。定义偏差与参照值的比值为定位误差。与此类似,计算圆曲线半径自动测量的误差。其中,圆直点的平均定位误差为2.97%,直圆点的平均定位误差为2.54%,圆曲线半径测量的平均误差为1.16%。
4.2 横纵坡度测量结果验证
4.2.1 横纵坡度人工测量方法
本文抽取1条车道及2条匝道为验证路段,每隔5 m取1抽检点,共计90个抽检点。采用数显坡度测量仪器测量路面坡度:道路横坡度的测量点布设于车道左右标线的位置,取其平均值为横坡度验证参照值;道路纵坡度的测量点布设于车道左右标线处及车道中心线处,取平均值为纵坡度验证参照值。
4.2.2 横纵坡度精准度验证结果
本文采用Dunnett统计学方法计算道路横纵坡度自动测量结果与参照值之间的偏差。相似性阈值取0.05,图6为抽检点的横纵坡度自动测量结果与验证参照值。通过Dunnett统计方法得出横纵坡度的验证结果P值分别为0.631和0.945,该结果说明抽检点自动测量结果与参照值并未存在明显差异。
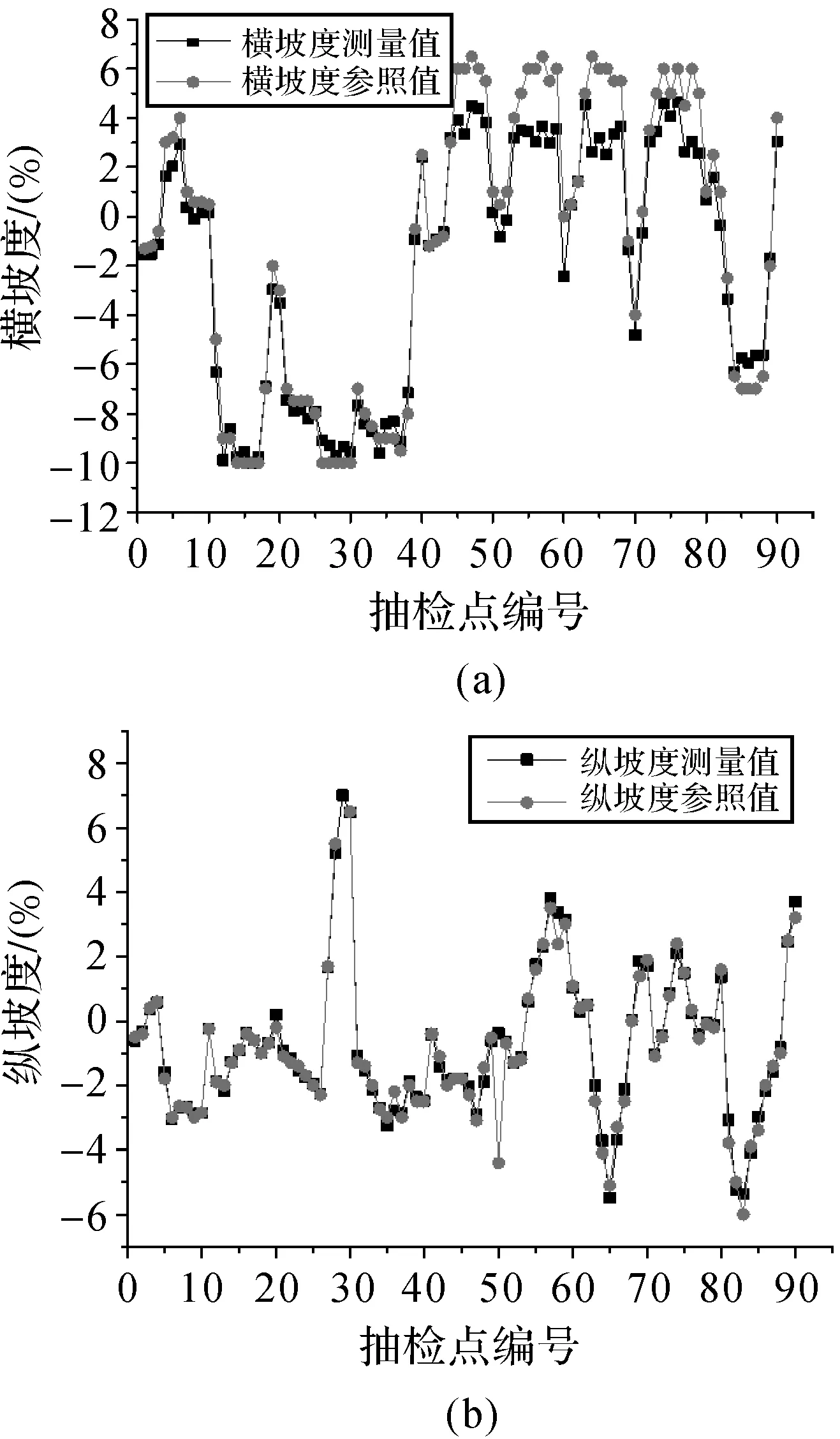
图6 道路坡度测量验证结果
5 结 论
本文通过车载LiDAR系统及惯导系统高效采集车辆行驶轨迹数据及路面激光点云数据,通过一系列算法提取并校正道路三维线形信息,并以福州市浦上大桥互通式立交为例,构建用于自动及辅助驾驶的三维高精地图。本文的主要结论如下:
(1) 同步匹配车载LiDAR系统及惯性导航系统,实现高效数据采集、多源数据融合;结合多源数据提出一系列消除由采集车横向偏移、颠簸、倾斜所造成的在道路线形信息提取上的必然缺陷的方法。
(2) 利用线性拟合算法、弦线支距法等自动提取道路三维线形信息,构建精度为10 cm的三维高精地图;并通过实地人工测量验证三维高精地图的精准性,其中圆直点定位、直圆点定位、圆曲线半径测量的误差分别为2.97%、2.54%、1.16%;基于Dunnett统计方法的道路横纵坡度的精准性验证,P值分别为0.631和0.945,误差计算结果及Dunnett试验结果表明三维高精地图各线形要素具有较高的准确性。
(3) 提出了一系列基于车载设备的道路信息数据采集、线形信息提取,以及三维高精地图构建方法,可应用于自动驾驶及辅助驾驶导航系统,为智慧公路的应用奠定了技术基础。同时,本研究也可应用于道路竣工验收及线形资料的补充完善。
猜你喜欢
机械制造与自动化(2022年6期)2023-01-10
水电站机电技术(2022年4期)2022-04-18
铁道建筑技术(2021年3期)2021-07-21
西部交通科技(2021年9期)2021-01-11
考试与评价·高二版(2020年4期)2020-09-10
福建基础教育研究(2020年3期)2020-05-28
铁道建筑技术(2020年11期)2020-05-22
中国特种设备安全(2019年4期)2019-05-20
海军航空大学学报(2015年1期)2015-11-11
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01