
混凝土喷浆车臂架抑振控制研究与应用
2019-01-09 07:48万林林曹希龙张淑君张卫国何继盛李明明
建筑机械化 2018年12期
万林林,曹希龙,张淑君,张卫国,何继盛,李明明
(徐州徐工施维英机械有限公司,江苏 徐州 221004)
混凝土喷浆车是一种隧道支护混凝土喷浆作业的专用设备。它主要应用于公路铁路隧道、地铁、矿山巷道等领域。喷浆车在施工过程中仍存在臂架晃动量大,操作手操作体验差等缺陷,造成喷浆作业喷头定位精准度差,进而导致喷浆混凝土表面平整度差。如何减少臂架晃动量,降低现场操作难度,提高喷浆作业时喷头定位精度,成为近年来混凝土喷浆车升级的关键技术。
1 喷浆车臂架控制工作原理
目前,行业内混凝土喷浆车臂架作业由转台回转、臂架变幅、臂架伸缩、末端喷头旋转等配合完成。这种结构方式既能够单独运行动作又能同时组合运行动作,能最大限度增加臂架展开自由度,增加狭小空间内作业面积。喷浆车结构如图1所示。
臂架控制系统由依次连接的液压油缸、油路管、电液比例阀、控制器、遥控器组成。总线型遥控器通过CAN网络发送手柄控制信号至控制器,控制器采用可控的PWM(脉宽调制)技术,电路中输出可变的开关电压,来驱动电液比例阀阀芯位移,从而控制液压油路的流量和压力,液压油缸驱动臂架动作。
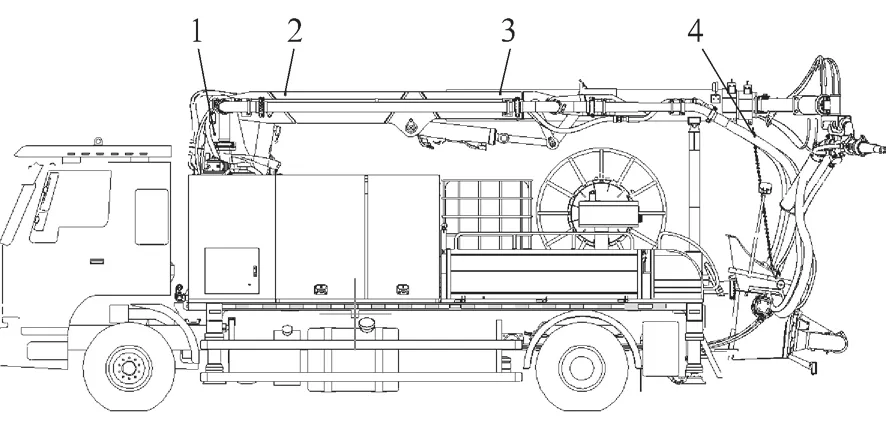
图1 混凝土喷浆车结构图
2 臂架振动原因分析
喷浆车臂架展开后的纵向变幅、横向回转是一种较大的惯性系统。在启动、制动过程中负载及本身惯性冲击会对臂架产生较大冲击,从而产生晃动。
再者,喷浆车臂架带有伸缩功能,臂架需要用柔性的混凝土输送管和气路软管进行连接。在臂架启动和停止时,刚性臂架运动带动柔性管路运动。在现有技术条件下,柔性的软管无法替代,臂架启动停止时,应尽量减少软管对臂架的惯性拖拉作用,以降低、消除其对臂架平稳性的影响。
在启动、制动阶段抑制惯性参量加速时间可以有效抑制臂架晃动。在不改变臂架结构及液压系统下选用合理的控制策略,可以在一定程度上弥补机械的性能缺失造成的臂架晃动的现象。
3 抑振原理及策略
遥控手柄开度值与控制器PWM端口输出成一定的比例关系。电液比例阀阀芯位置基于PWM原理控制,一旦阀芯到达位置,脉宽调制结束,阀芯位置锁定。假设忽略比例阀响应迟滞,理想状态下,臂架油缸伸缩速度与手柄操作速度成一定比例关系。如图2所示。遥控手柄幅度与控制器输出对应关系,如图3所示。在t1、t2阶段由于时间较短,这一阶段变化过程可看成阶跃响应,遥控手柄从零位至满行程,速度越快臂架晃动量越大。通过测量臂架速度及振动量,发现加速度越大带来臂架晃动冲击越大。在某个加速区间内,臂架动作即能满足工况要求,在此区间内臂架具有较好的平顺性。臂架油缸平均速度与臂架晃动振幅关系如表1所示。
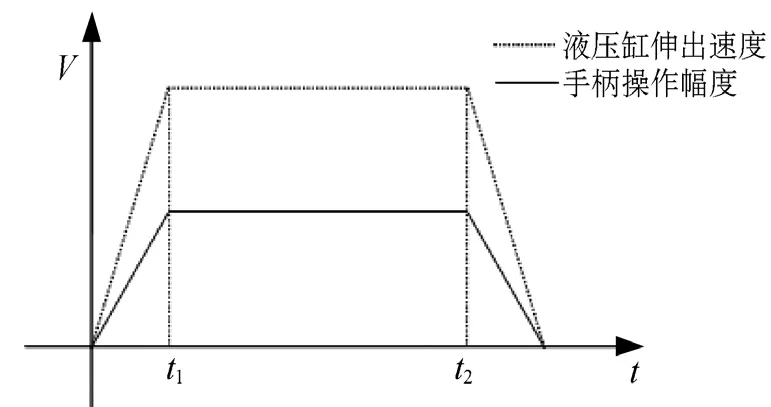
图2 臂架伸速与手柄幅度
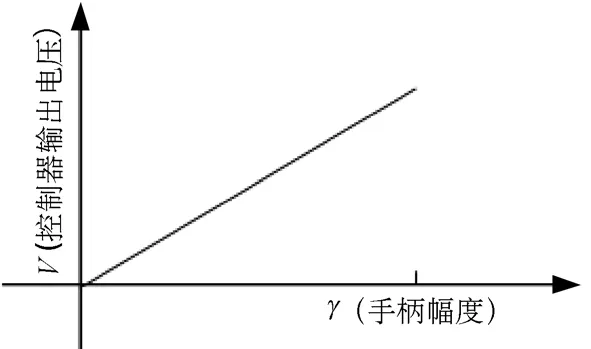
图3 手柄幅度与控制器输出
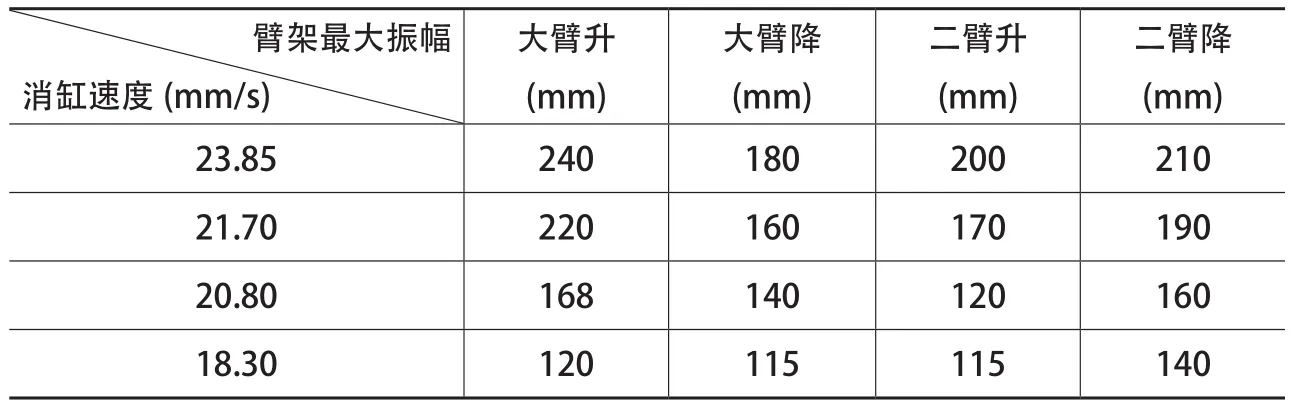
表1 臂架油缸平均速度与臂架晃动振幅

表2 手柄开度与端口输出电流对应表
按照以上思路,如果在相同操作下可以降低多路阀响应速度,使控制多路阀的输出比例电流按照一定缓冲曲线输出,可有效降低突然启停引起的冲击,从而保证起动和停止阶段臂架平稳运行。所以在t1、t2阶段,加入缓冲曲线度,使得初始阶段缓慢输出,后段快速输出。通过控制器采集手柄开度数值(取值范围0~127)与端口输出电流相应变化数据,部分数据如表2所示。
通过采集数据,拟合手柄开度值与比例阀电流(mA)缓冲曲线,如图4所示。通过修订及应用比较不同曲线输出效果,确定3型拟合曲线。
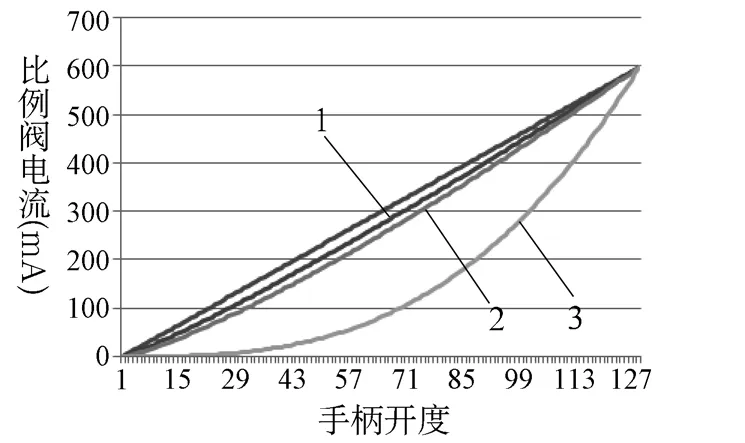
图4 手柄开度与比例阀电流拟合曲线
由于t1、t2变换时间短,在应用缓冲曲线输出后,臂架抑振效果有限,为进一步提升抑振效果,需要降低端口输出响应。根据控制原理,设计一阶惯性环节软件算法。

其中,a为惯性系数,Y(n-1)为上次输出值,X(n)为本次采样值。此惯性滤波算法能使本次采样值与上次输出值进行加权,使得输出对输入有一定反馈作用,从而有效降低手柄突变对比例阀输出响应。
4 结 语
本文通过对喷浆车臂架振动影响因素分析,明确了臂架抑振控制的控制方式,通过引用缓冲曲线及惯性算法,优化控制策略,在一定程度上有效弥补机械特性带来的性能缺失。经过场内及施工现场实践,喷浆车臂架晃动明显降低,操作可控性、臂架工作寿命均得到了提升。
猜你喜欢
湖南工业职业技术学院学报(2022年3期)2022-12-06
装备制造技术(2020年11期)2021-01-26
世界有色金属(2020年8期)2020-12-10
四川水利(2020年1期)2020-03-11
中国工程机械学报(2019年6期)2019-12-31
电子制作(2018年11期)2018-08-04
质量技术监督研究(2018年1期)2018-03-26
制造业自动化(2017年2期)2017-03-20
中南大学学报(自然科学版)(2016年2期)2017-01-19
专用汽车(2016年7期)2016-11-23
