
船载水声定位系统自动校准技术研究
2019-01-10 10:04张庆国匡彪要庆生连莉
声学技术 2018年6期
张庆国,匡彪,要庆生,连莉
船载水声定位系统自动校准技术研究
张庆国,匡彪,要庆生,连莉
(昆明船舶设备研究试验中心,云南昆明 650051)
在分析常规水声定位系统校准方法的基础上,结合某型船载水声定位系统的工程研制,提出了一种自动校准方法。该方法无需常规的动态或静态校准,可在每次系统安装完成后自动检测及校准。利用基阵中心位置的发射换能器以及船只固定连接杆入水端的发射换能器依次发射校准声信号,将获得的水声定位坐标与上述两个发射换能器固定对应的全球定位系统(Global Positioning System, GPS)天线坐标进行平移和偏转,获得偏移参数矩阵,实现系统校准。某水域的跑船试验验证结果表明,利用该自动校准方法可在两分钟内完成全部自检及校准工作,并且水声定位轨迹与跑船GPS轨迹重合较好,具有校准效率高、测量精度高等优点。
船载系统;水声定位系统;自动校准方法
0 引言
船载水声定位系统不受试验水域和具体水下地理环境的限制,具有较好的灵活性和便捷性,在水下目标定位跟踪及导航领域得到了广泛应用[1-2]。当前船载水声定位系统,多采用超短基线和短基线形式[1]。利用水声定位原理,实时获得水下目标相对于船载基阵的位置信息,再结合船只当前的全球定位系统(Global Positioning System, GPS)/北斗定位系统的定位信息,以及船载基阵的姿态等相关信息进行坐标转换获得水下目标的绝对坐标信息;利用水声通信原理实现水下目标的遥测、遥控以及水下导航等功能。
由于船载式水声定位系统存在基阵坐标系、船只坐标系、大地坐标系等多个坐标系的转换[2-3],其水声定位导航的精度直接与坐标系的转换相关。因此,船载水声定位系统在安装完成后,需要进行校准,获得不同坐标系之间的坐标偏移参数,经过修正后才能实现水声定位及导航等功能,才能确保其定位与导航精度。
常规需重新安装的水声定位系统无论是采用动态还是静态校准方式,均存在校准工作量较大、经济性差、准备时间过长等不足。虽然国内外进行了多种方法的研究和测试,在动态校准的基础上提出了静态校准的实施方法,但均需要人工跑船或静态吊放声源进行比对校准。特别是在需要反复拆装船载基阵的工程应用上,每次船载基阵安装后均需进行适应性校准,试验效率较低,且用户使用成本较高。如能研制一种无需人工校准的船载水声定位系统,将大大提高工作效率,降低人工操作的复杂度,提高用户满意度。
1 船载水声定位系统
船载式水声定位跟踪系统[4]主要由湿端设备、信号处理设备、信标等三部分组成。其中湿端设备包括声学基阵(船载短基线阵,由5元组合换能器构成)、水密电子舱、电子组件等设备;信号处理设备包括模拟信号处理、数字信号处理、数据处理显控、航姿测量、系统供电等设备;信标安装在水下目标上,为系统提供定位信标信号,由信号产生组件、功放组件、组合换能器和内置电池等组成。系统工作示意图如图1所示。
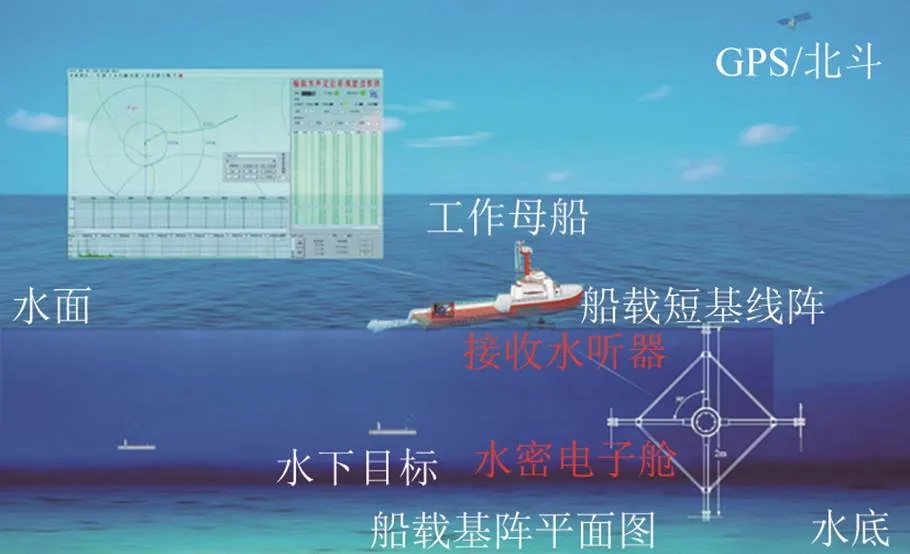
图1 船载水声定位跟踪系统示意图
如图1所示,船载短基线阵通过工作母船上的开放式水槽进行布放,利用刚性连接杆与基阵固定连接。船载基阵上阵元共5个,分别布放在十字阵的四个端点和中心点。受现场水槽功能复用要求的限制,需要每次使用时进行基阵的现场安装,使用完后拆除。因此,与常规船载短基线水声跟踪系统相比较,本系统主要特点是船载基阵需要反复拆装,并且是非固定方向的随机安装方式。由于每次安装的基阵方向不同,必须进行每次安装后船载基阵的现场校准。
船载水下十字型基阵(如图1所示)布设时对其方位无严格要求,但需要获知布放完成后的基阵与船只航向角之间的夹角。理论上基阵坐标系与船只坐标系一致是最为理想的情况,但实际施工时无法做到,并且本项目中要求船载基阵安装方式为“盲连接”方案,不强制要求基阵与船只的坐标系一致,以便于现场的快速安装与固定。因此,必须考虑船载基阵每次重新安装后的现场校准(主要是获得基阵方向与船只航向之间的夹角)。如果不进行校准,无法后期修正十字基阵与船只纵横方向之间的夹角,将会导致水下目标的位置信息出现偏转,例如,本应该在船头方向却被错误定位成船尾或船舷等其他方向。
由此可见,系统现场校准是必须的。但如果每次使用时均按照船载水声定位系统常规方法进行校准,存在准备时间长、经济性差,且工作效率不高等不足。另外,由于机械结构的加工工艺限制,每次安装的基阵坐标系与船只坐标系的偏差也不尽相同,如不进行试验前校准,将对水声定位精度造成较大的影响,甚至无法准确实现水下目标的定位与导航等功能。
本系统采用同步式短基线水声定位原理[4],利用船载短基线阵实时接收水下目标上发出的同步脉冲信号,经过解算获得基阵上每个水听器接收到的声信号传输时延值,利用球面交汇原理获得水下目标的位置信息;实时融合外部设备(如GPS/北斗、航向、航姿等)信息,进行相应坐标转换,即可获得水下目标的大地位置信息,完成实时水声定位跟踪与导航。
2 常规校准方法
船载水声定位跟踪系统通常采用“动态”或“静态”方式进行系统校准,基本原理是利用已知大地坐标点位同时发射声信号,船载水声定位系统进行水声定位。将多个不同点位(通常需要覆盖四个象限)的大地坐标与水声定位坐标进行比对,获得基阵的偏移与旋转参数矩阵,确保水声定位精度。
“动态”校准需要船只按照规划航路进行航行,利用在基阵不同方位上的多个测量点进行测量,将水声测量数据与GPS/北斗测量数据进行比对分析,结合最小误差原理获得校准参数[5]。典型校准方案如图2所示,其中图2(a)为载有水声定位系统的工作母船,围绕沉底的校准声源进行动态校准;图2(b)为工作母船停航或抛锚,而校准船只携带声源围绕工作母船进行动态校准。
“静态”校准与上述“动态”校准基本原理相同,利用在工作母船船舷吊放若干个应答器(声源),同时获得应答器船只坐标及水声定位相对于船载基阵的坐标,经过处理即可得到坐标系之间的夹角[2],实现水声定位系统的现场校准。
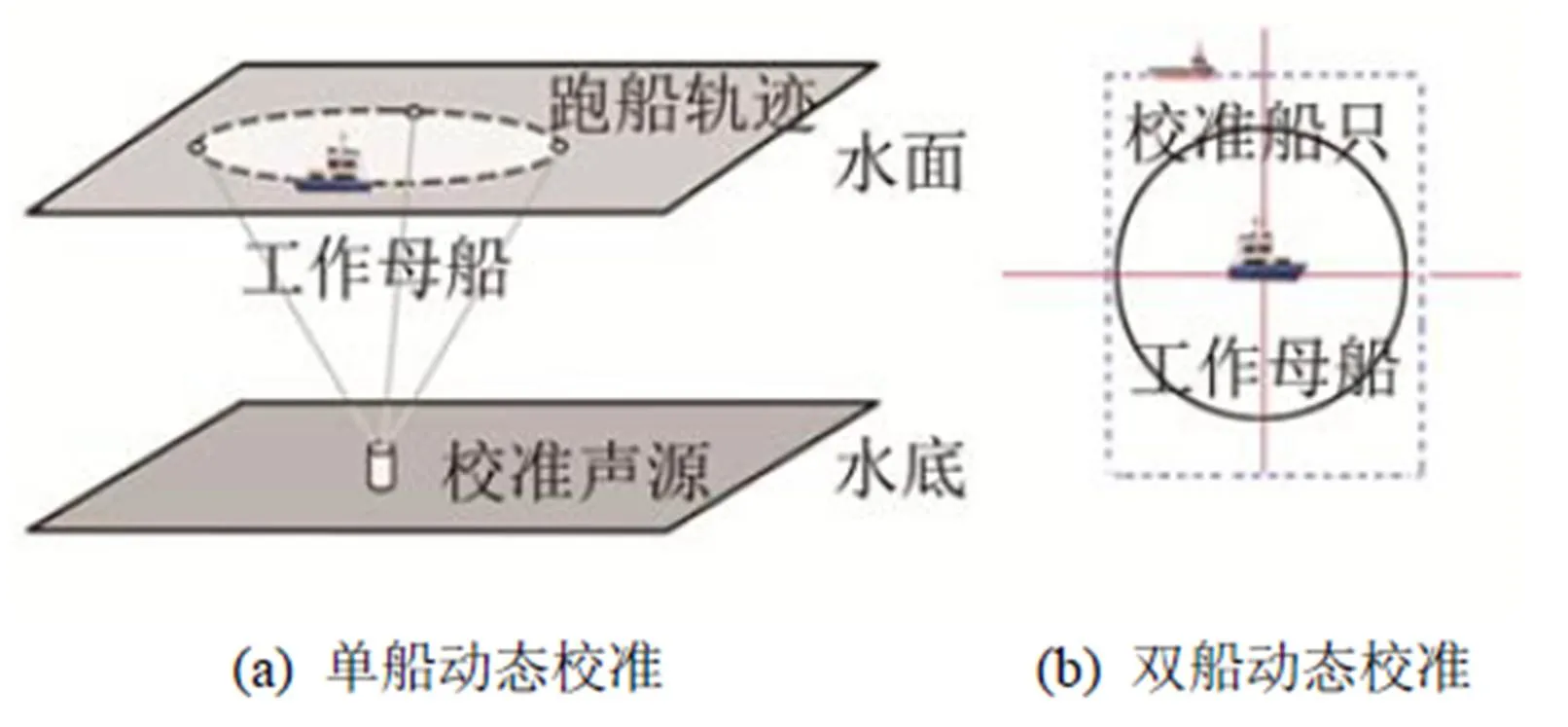
图2 常规动态校准方法示意图
综上所述,无论是“动态”还是“静态”校准均需要大量人工操作,需要携带声源进行航路规划,或在船舷附近吊放若干个声源。存在校准时间长,甚至需要多条船只配合才能完成,经济性及工作效率均不佳,更为重要的是对需要反复拆装的船载水声定位系统来讲,几乎难以实现。
3 自动校准方法
由于本船载式水声定位系统需要在工作母船上随时安装使用,任务完成后即拆除。因此,为便于使用必须采用自动校准方法。为了更好地说明自动校准方法,将船载水声定位系统的安装条件说明如下:
(1) 基阵通过船只固定位置的直通水槽进行安装布放,并且基阵与船只采用刚性连接杆进行固定连接;
(2) 每次使用时进行基阵的现场安装布放,使用完成后拆除基阵,将水槽留给其他设备使用,但每次安装的连接杆点位固定;
(3) 基阵每个阵元的高度由机械结构设计保证,确保多个阵元处于同一水平面,或高度差固定且可试前测量获得,为已知量;
(4) 基阵与连接杆之间的安装结构,具有单向卡槽防差错机构,可确保基阵坐标系与船只坐标系的夹角在较小范围内(夹角<5°)。基阵与船只连接杆一旦固定完成,其夹角便为固定值(忽略航行过程中机械结构的微小形变),该夹角()为未知量;
(5) 基阵中心位置以及基阵固定的连接杆上(入水端)均安装有发射换能器(两个发射换能器),用于发射校准声信号;
(6) 船只绝对位置信息及航姿信息的获取集成在一套GPS双天线测量设备中,分别对应(5)中的两个发射换能器;
(7) 基阵内部安装有高精度姿态传感器,可实时获得船载基阵的姿态信息,并将其作为当前时刻的姿态参数参与水声定位解算。
船载水声定位系统基阵的具体安装示意图如图3所示。
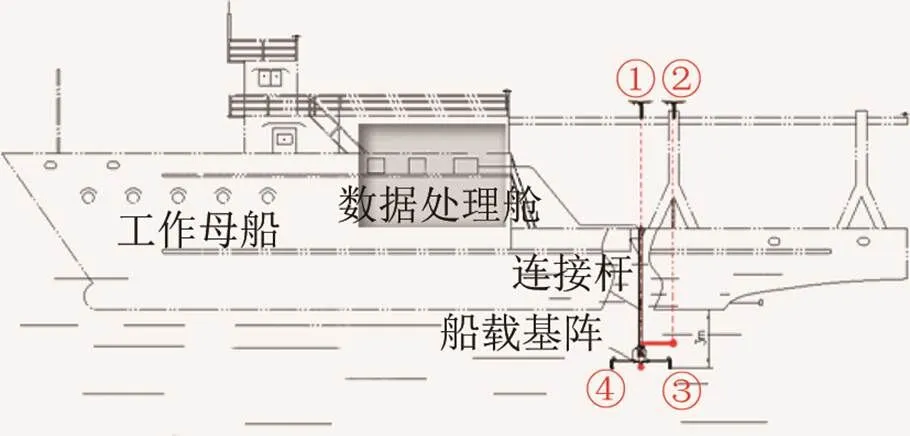
图3 智能化船载水声定位跟踪系统安装示意图
图3中①、②分别为GPS双天线测量设备的两根天线,③为上述连接杆入水端上固定连接的发射换能器,④为上述基阵中心位置的发射换能器。本智能化方法的关键设计点如下:
(1) ①和④对应且在同一垂线上(或安装偏差固定可测量),由机械结构设计和安装结构保证;
(2) ③固定连接(通常为焊接)在连接杆入水端,并且③与②在同一垂线上(或安装偏差固定可测量);
(3) 数据处理舱(如图3所示)内的信号处理设备可实时获得①和②两点的GPS位置信息,同时可控制③和④的发射换能器进行校准声信号的依次发射与停止;
(4) 基阵上的每个阵元均由收发合置的换能器组成,可受控进行发射或接收。
实际上,图3中①、②处的GPS天线为船载固定装置,在试验后不进行拆除,而③亦为船载套管(船载基阵的连接杆穿过套管)上固定安装的设备,需要①和④为对应在同一垂线上,③与②在同一垂线上,或者两者之间的垂直偏差可测量修正,也就是说需要①和④、③与②在同一垂线上或偏差量可测。如果垂直对应的偏差量没有进行修正,将直接影响水声定位精度。假设③与②垂线上位置偏差为0.1 m,垂直高度假设为8 m,其夹角为arctan(0.1/8)≈0.7°。航向角偏差近似为0.7°,在距离为2 000 m的情况下,由此夹角带来的水声定位误差为2 000tan(0.7)≈25 m。
另外,上述方案考虑了船载基阵在航行状态下的实际情况。本方案的船载基阵(安装完成后)和GPS天线等参考点均与试验船只刚性固定连接,在不考虑刚性连接形变的基础上,重新安装后的船载基阵与船只之间的夹角可自动计算出,以供在后续定位算法中进行修正。由于在风浪情况下,船只、基阵、GPS天线之间的相对位置是固定的,所以本校准方法可获得相对夹角,以保证水声定位精度。
智能化船载水声定位系统的流程图如图4所示。其主要工作流程是:基阵完成布放后,数据处理舱内的显控软件(用户界面)自动进行入水监测,如基阵入水则进行自校准,否则在软件界面上进行信息提示;然后利用基阵上的多个收发合置换能器依次发射校准声信号,显控软件获得阵元间距;之后控制③和④依次进行校准声信号发射,同时融合当前时刻①和②两点的GPS位置信息,分别获得基阵坐标系与船只坐标系的偏移量(,)和旋转偏角();最后代入基阵内部的姿态相关信息[6],进行综合处理计算,最终获得水下目标的精确定位信息。
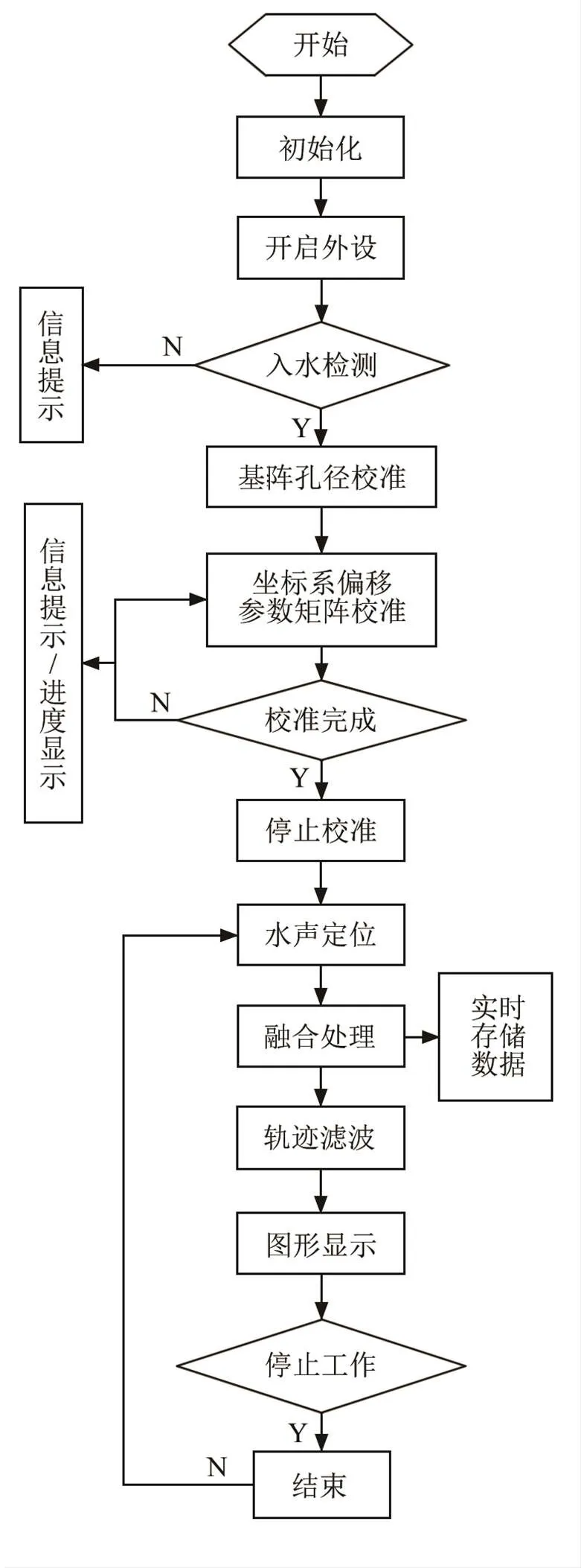
图4 船载水声定位系统自动校准流程图
4 实航试验
船载基阵为5元十字阵,与工作母船采用刚性连接杆进行固定连接,实物如图5所示。基阵孔径为2 m,铝合金结构。由于受到风浪及涌流的影响,基阵孔径发生变化,而且基阵平面也会发生变化。根据常规误差分析可知,由基阵孔径的形变带来的水声定位误差为×(∆/),假设为2 000 m,为2 m,∆为0.002 m,则由基阵形变带来的误差即为2 m。因此,为了提高水声定位系统的定位精度,需要对当前的基阵孔径进行自动校准修正,进一步降低系统误差。另外,除了试验船只航行受海况影响外,本校准方法对海况无特殊要求。
在国内某水域进行试验测试,船载水声定位系统安装完成后,约两分钟即完成自动校准工作进入定位跟踪状态。

图5 船载基阵实物图
利用试验船只吊放声源(声源上对应有全球差分定位系统(Differential Global Positioning System, DGPS)天线)的方式,采用动态跑船方法对系统定位功能和精度进行验证,其实际航行试验定位跟踪结果如图6所示。
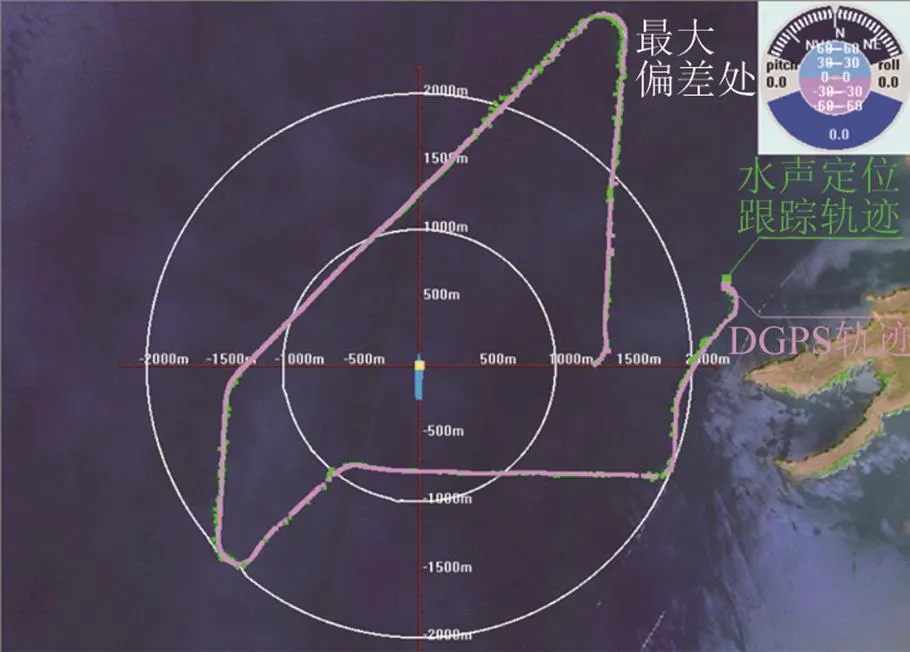
图6 水声定位系统和GPS在某水域跑船试验定位跟踪轨迹对比图
图6中有两条轨迹,分别为水声定位系统实时记录的水下目标位置信息,以及跑船试验的船只GPS轨迹。由于GPS与声源处于同一垂直面上,理论上这两条轨迹应该重合。因此,通常以GPS轨迹为基准来判断水声定位的总体精度。
图6中的湖上试验为在约2~3级湖况下的实际航行试验,证明本方法在一定风浪情况下可使用,并保证其水声定位精度。由图6可见,经过校准后的水声定位误差由67.5 m缩减至12.5 m。
由图6可知,试验船只的DGPS轨迹和水声定位轨迹重合度较好,以图6最远处(标注为“最大偏差处”)为例,实际经校准的水声定位偏差为12.5 m,远小于常规的定位偏差67.5 m。因此,实际航行试验证明了经过自动校准的船载水声定位系统具备较高的定位精度,并且校准效率高,具有较高的工程应用价值。
5 结论
本文在水声定位系统常规校准方法的基础上,利用与船只固定连接的多元组合式短基线阵,以及连接杆上的发射换能器,结合对应的GPS双天线测量设备,提出一种船载水声定位系统自动校准方法。该方法无需试前人工校准,具有使用效率高、人工操作简单、智能化程度高,且对现场安装精度要求不高等优点。目前,该系统已经在某工程项目上得到成功应用。
该方法具有广泛的适应性,不仅适应于船载式机动性强的水声定位系统,又可应用于其他水声定位系统,经过扩展和改进还可应用在相类似的海洋工程上,具有较高的工程实用价值。
[1] 田坦. 水下定位与导航技术[M]. 北京: 国防工业出版社, 2007: 67-68. TIAN T.Underwater positioning and navigation technology[M]. Beijing: National Defence Industry Press, 2007: 67-68.
[2] 王坤石. 一种超短基线水声定位系统的静态校准方法: 中国, CN105652262A[P]. 2016-06-08. WANG Kunshi. A static calibration method for ultra short baseline underwater acoustic positioning system: China, CN105652262 A [P]. 2016-06-08.
[3] 刘百峰, 罗坤. 一种船载水声定位系统标定方法研究[J]. 舰船科学技术, 2015, 37(11): 108-110. LIU Baifeng, LUO Kun. Research on calibration method of Shipborne underwater acoustic positioning system[J]. Ship Science and Technology, 2015, 37(11): 108-110.
[4] 张庆国, 王健培. 船载式水声跟踪系统定位原理及误差分析[J]. 现代电子技术, 2013, 23(1): 70-73. ZHANG Qingguo, WANG Jianpei. Shipborne acoustic tracking system positioning theory and error analysis[J]. Modern Electronics Technique, 2013, 23(1): 70-73.
[5] 唐秋华, 吴永亭, 丁继胜, 等. 超短基线声学定位系统的校准技术研究[J]. 声学技术, 2006, 25(4): 281-287. TANG Qiuhua, WU Yongting, DING Jisheng, et al. Research on Calibration Technology of ultra short baseline acoustic positioning system[J]. Technical Acoustics, 2006, 25(4): 281-287.
[6] 张庆国, 王健培, 龚浩亮, 等. 船载式水声定位系统信号处理改进算法研究[J]. 声学技术, 2015, 34(3): 265-268. ZHANG Qingguo, WANG Jianpei, GONG Haoliang. Research on improved signal processing algorithm for shipborne underwater acoustic positioning system[J]. Technical Acoustics, 2015, 34(3): 265-268.
Research on automatic calibration technique of shipborne underwater acoustic positioning system
ZHANG Qing-guo, KUANG Biao, YAO Qing-sheng, LIAN Li
(Kunming Shipborne Equipment Research & Test Center, Yunnan, Kunming 650051, Yunnan,China)
On the basis of analyzing the calibration methods of conventional underwater acoustic positioning system, an automatic calibration method combining the development of the shipborne underwater acoustic positioning system is proposed. This method does not require routine dynamic or static calibration, and the system can be automatically detected and calibrated after each installation. The method uses both the transmitting transducer at the center of the array and the transmitting transducer at the water inlet end of a fixed connecting rod with the vessel to transmit acoustic calibration signals in turn, so that the acoustic positioning coordinates are obtained, and the GPS coordinates are obtained by two GPS antennas which are fixed correspondingly with the two transmitting transducers; then translates and deflects the acoustic positioning trajectory to make it well coincide with the GPS trajectory of running ship, and to obtain the offset parameter matrix. Thus, the system calibration is implemented. The experimental results show that this calibration method can complete all self-checking and calibration within two minutes. The most important operation in this method is to make the underwater acoustic positioning trajectory coincide well with the GPS trajectory of the running ship. The method has high calibration efficiency and high measuring accuracy.
shipborne system; underwater acoustic positioning system; automatic calibration method
U666.7
A
1000-3630(2018)-06-0535-05
10.16300/j.cnki.1000-3630.2018.06.004
2017-09-06;
2018-02-10
张庆国(1981-), 男, 黑龙江人, 研究方向为水声工程技术。
张庆国, E-mail: ZQG750@126.com
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
声学与电子工程(2021年3期)2021-10-13
水下无人系统学报(2018年5期)2018-11-09
电子制作(2018年2期)2018-04-18
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
弹道学报(2016年4期)2016-12-14
系统工程与电子技术(2016年7期)2016-08-21
西北工业大学学报(2015年3期)2015-12-14
雷达与对抗(2015年3期)2015-12-09
