被动声呐多目标自动检测与跟踪算法研究
2019-01-12 02:43高运孙德龙周胜增
声学与电子工程 2018年4期
高运 孙德龙 周胜增
(上海船舶电子设备研究所,上海,201108)
多目标自动检测与跟踪是现代声呐的重要组成部分,该系统有助于在多维信息高速接收的情况下减小声呐员的工作量,使水下探测功能得以实现。然而由于杂波、多途干扰、信噪比较低、目标多等原因,水下环境对多目标检测及跟踪是一个极具挑战的领域。用于杂波环境中的多目标跟踪的最佳算法(多假设跟踪)具有按指数增加的计算量和存储要求,基于这个原因,为了解决多目标跟踪问题提出了许多次优算法,这些算法常常会在跟踪性能与算法之间进行折中。
国外泰雷兹公司[1]及阿特拉斯电子公司[2]分别给出了高性能的隐马尔科夫与改进的多假设跟踪算法及跟踪仿真结果,仿真结果显示此类算法具有较好性能,但其复杂度高,对目标先验信息要求较高,不易应用于工程实践。国内中科院声学所[3]给出了一种基于图像处理的跟踪算法,解决了图像处理中的实时性问题。文献[4]给出了最邻近卡尔曼滤波器(Strongest Neighbor Kalman Filter,SNKF)的海试数据跟踪结果,在复杂的环境下SNKF表现出较好的性能。
本文在宽带相关检测的基础上,以SNKF作为跟踪算法的核心,给出了一种被动声呐多目标自动检测与跟踪算法,海试数据的检测及跟踪结果显示,该算法很好的解决了轨迹交叉及中断问题,算法计算量小,易于工程实践。
1 自动检测
1.1 宽带相关检测算法原理[5-7]
宽带相关检测即将接收基阵划分为相等的两半,以形成同向波束对,并使其输出具有复杂的互相关性。在给定足够的信噪比时,由此处理过的相位输出将提供宽带能量十分之一波束分辨率的方位测量信息。值得注意的是,相比于宽带能量检测,利用宽带相关检测会产生1.5 dB的损失,它是为了提高方位分辨力所付出的代价。其原理流程如图1所示。
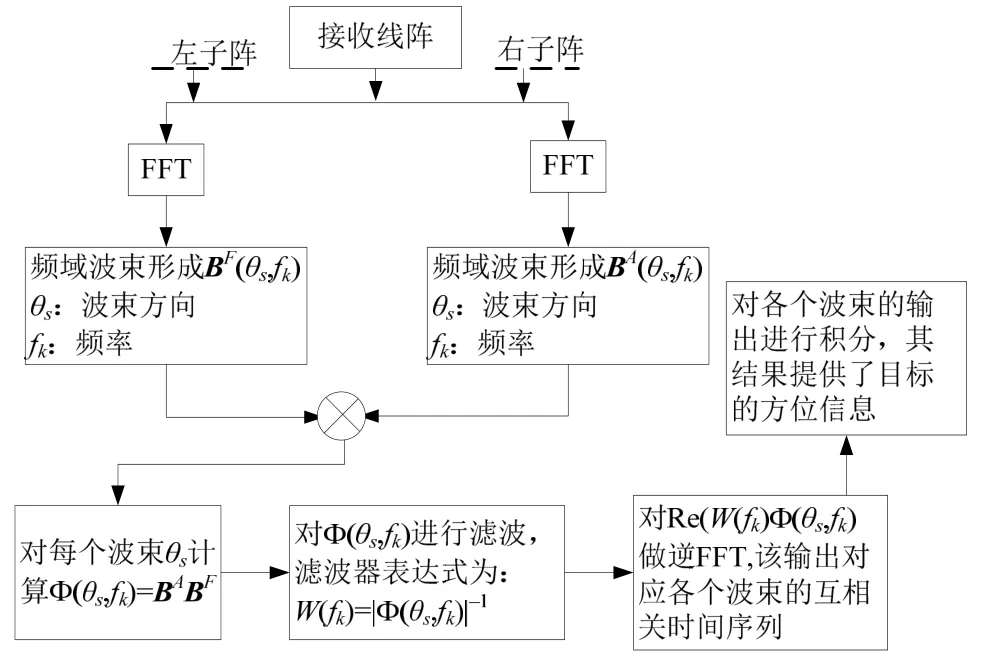
图1 分裂波束算法流程框图
1.2 峰值的提取原则
本文将文献[8]中对功率谱峰值的提取原则应用于宽带互相关算法的检测输出。该原则陈述如下:
(a)一个峰必须具有左右边界,且左右边界的宽度小于某个门限,此门限与角度分辨率有关。
(b)峰的左右边界的斜率必须超过某一门限。提取的峰值必须是尖锐的。
(c)峰值的幅度必须超过某一门限,此门限可根据要求的检测概率及虚警概率设定。峰值提取结果如图2所示。
2 自动跟踪
2.1 轨迹初始化
本文采用一种基于逻辑的轨迹初始化方法[9],在该方法中会设置多个门限,当某一检测序列满足这些门限时,认为这一检测序列为有效轨迹。该逻辑可以陈述如下:
(1)将所有未被关联起来的测量值视为一个轨迹起始点。
(2)在该起始点出现的后一拍,设置一个有效区域,区域的大小取决于目标运动参数的最大值、最小值以及观测噪声值。如果下一拍中有测量值落入该区域,那么两次测量值便形成一条初始轨迹,如果没有测量值落入该区域,那么便将该起始点删除。
(3)初始轨迹中出现前后两个批次的测量值,便可以对卡尔曼滤波器进行初始化。通过该滤波器得到初始轨迹下一拍的有效区域。
(4)从第三拍开始,采用N拍之中有M个测量值落入有效区间中的逻辑,若某一检测序列满足该判断逻辑,那么便认为该初始轨迹为真实存在的目标轨迹,否则将该初始轨迹删除。

图2 峰值提取结果
2.2 SNKF原理[10]
2.2.1 卡尔曼滤波原理
目标运动方程:

式中,xk为2维状态向量(角度及角度变化率),Fk为状态转移矩阵,wk为系统噪声。假定其均值为零的高斯白噪声,协方差E(wkw'j)=Qkδkj。观测方程:

式中,Hk已知,yk为观测噪声。假定其均值为零的高斯白噪声,协方差E(yky'j)=Rkδkj。卡尔曼滤波原理及流程如图3所示。
2.2.2 最强邻近原理
在卡尔曼滤波的基础上,利用式(3)计算出一个有效区间,当有多个观测值落入此有效区间内,选择其中信噪比最强的观测值对此滤波器进行更新。
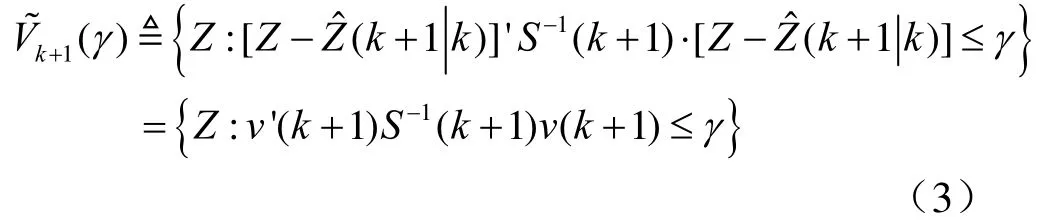
式中,γ对应该区间的大小。
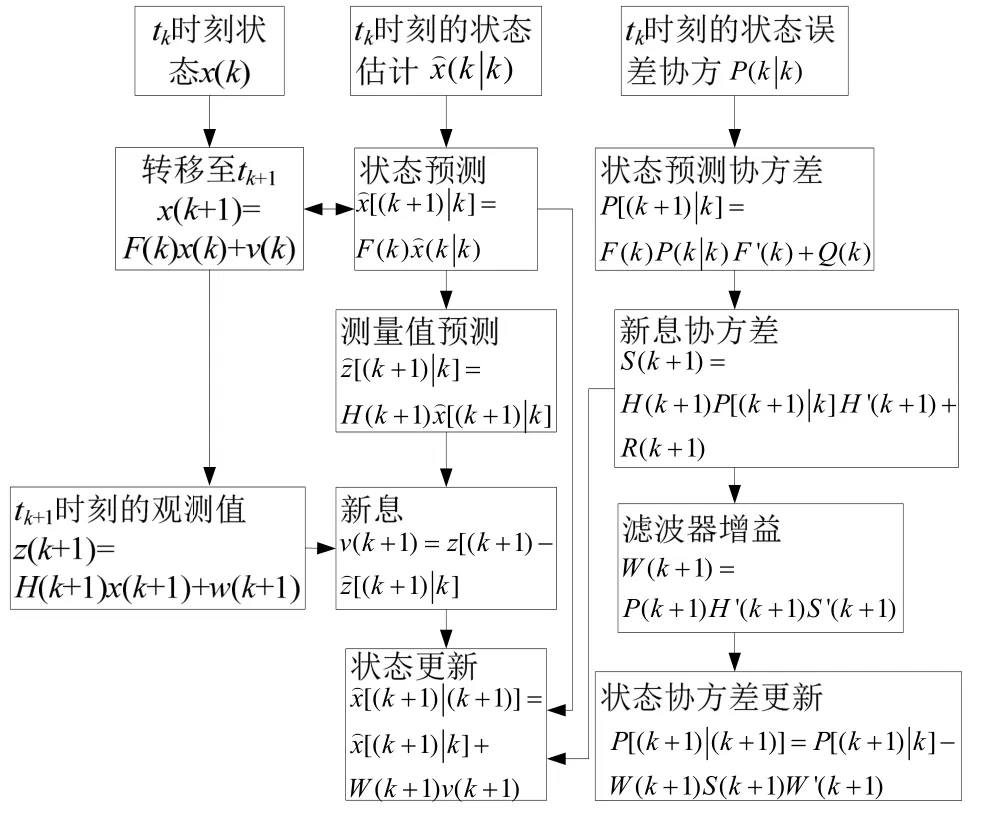
图3 卡尔曼滤波器工作原理图
3 轨迹与轨迹之间的关联[1]
在工程实践中,目标轨迹通常会因某一时刻信噪比过低或者目标交叉而出现轨迹中断,这样会产生同一目标却给出多个批号的的问题。因此需要判断两条轨迹是否属于同一目标的逻辑。该逻辑陈述如下:
(1)利用最小二乘拟合计算出中断轨迹的角度变化率,向前预测直至新轨迹出现,记录预测位置。
(2)新轨迹出现一定时间内,利用最小二乘拟合计算出角度变化率,记录新轨迹出现位置(K+1)。
(3)利用式(4)计算两段轨迹的马哈拉诺比斯距离,判断两条轨迹是否属于同一目标。
4 海试数据验证
试验海区深度55 m,沙泥底质,海况3级,恶劣水文条件,本舰航速14 kn,拖线阵放缆长度500 m,布放深度25 m,配合目标为水下高速目标,深度 20 m,左舷 130°,其他目标为水面船只。图4给出了原始的海试数据,图5给出了利用上述算法得到的跟踪结果。结果显示,该算法很好的解决了目标交叉及目标轨迹由于信噪比低而中断的问题。
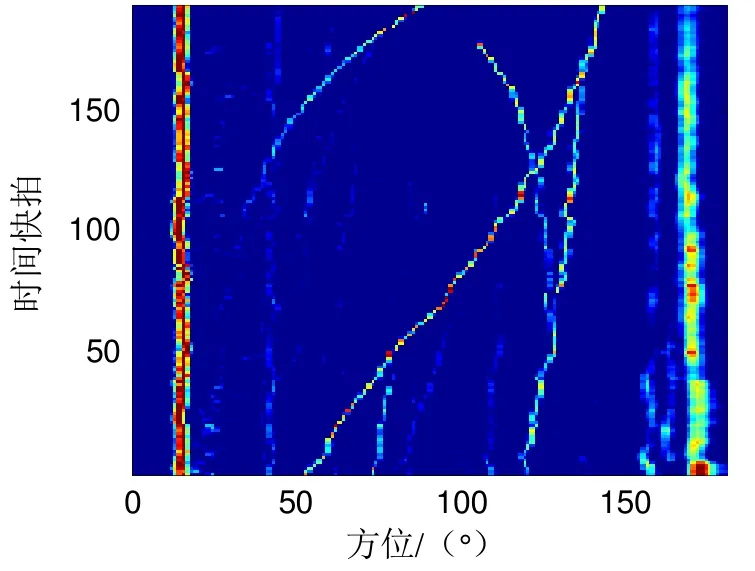
图4 观测值
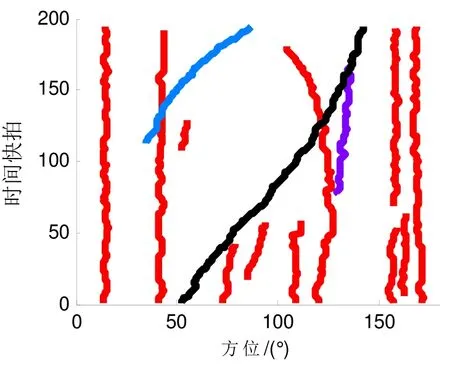
图5 跟踪结果
5 结论
本文给出了一种实用的被动声呐多目标自动检测与跟踪算法,该算法以分裂波束形成算法为检测手段。其跟踪算法部分,在SNKF基础上,增加了轨迹与轨迹关联功能,解决了由于目标轨迹中断而产生的相同目标却给出多个批号的问题,海试数据结果显示,该算法效果显著,具有工程实用价值。
猜你喜欢
哈尔滨轴承(2020年2期)2020-11-06
军工文化(2019年12期)2019-03-31
电子制作(2018年19期)2018-11-14
电子制作(2018年9期)2018-08-04
北京航空航天大学学报(2017年9期)2017-12-18
环球时报(2017-11-09)2017-11-09
船舶经济贸易(2017年8期)2017-08-30
光学精密工程(2016年1期)2016-11-07
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22