
小型便携式电缆沟巡检小车的设计与应用
2019-01-22 02:19姜凌霄徐世东严中亮
山西电力 2018年6期
姜凌霄,徐世东,严中亮
(1.国网山西省电力公司检修公司,山西 太原 030001;2.国网山西送变电工程公司,山西 太原 030001;3.国网山西吕梁供电公司,山西 离石 030012)
0 引言
现阶段输变电工程大多实行无人值守变电站,且电缆沟位于地下,空间狭窄封闭,给运行人员定期巡检带来困难[1],不安全隐患很难及时发现。根据国家电网公司对500 kV变电站的巡视检查要求,提出了“每月要定期开展电缆沟的检查,检查电缆沟杂物、积水、电缆脱落和电缆沟内防火隔墙以及电缆沟内小动物活动的防护情况”等维护任务。
1 实际的电缆沟巡视过程中面临的问题
运维人员在实际的电缆沟巡视过程中主要有以下两个方面的问题。
1.1 人工检查电缆沟费时和费力
运维人员在检查电缆沟的过程中普遍存在检查电缆沟时间长的共性问题。检查时间长,主要是因为电缆沟较长,且电缆沟中的防火隔墙多。现有方法是采用人工翻开电缆沟盖板进行检查,必要时还需要人工钻进电缆沟进行重点巡视。电缆沟盖板本身重量不轻,再加上电缆沟空间狭小阴暗,检查非常不便,遇到防火隔墙时必须钻出该段电缆沟,翻开另一段电缆沟盖板再次进入,整个巡视过程极为费时、费力。
1.2 检查电缆沟容易造成人员伤害
巡视电缆沟过程中,由于电缆沟内支架多,锋利边缘多,空间狭窄,人员在进出电缆沟的时候很容易被磕碰划伤。而且电缆沟内属于密闭空间,在夏季,有积水或者有死老鼠时,空气环境极其恶劣,无法满足人员入内巡视检查的要求。
2 小车的组成及其功能原理
电缆沟道监测机器人由机器人平台、控制模块、电源模块、遥控及监测模块、通信模块等组成[2],系统操作软件安装在手机APP上,实现对机器人的遥控操作。
2.1 小车控制平台
小车运动控制设计的实现建立在arduino平台上,使用arduino专用语言进行编程,将编辑完成的程序下载进控制小车程序的中央处理器CPU中,以使其完成指定的动作及功能。中央处理器CPU对小车的3路电机进行驱动,除了控制小车的行动外,还另外控制小车摄像头云台的运动,实现不同角度的视角观察,小车的运动控制流程图如图1所示。摄像头采用直连方式,与APP后台端口直接对接,不经过小车中央处理器CPU,这样设计的目的是减少视频传输延时。
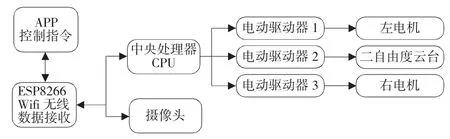
图1 小车运动控制框图
小车的控制芯片组件带有金属网屏蔽罩,可以屏蔽电缆沟内的电磁干扰,保证小车控制芯片的正常工作,此项技术在国内研究领域未见使用。该小车使用arduino平台,可以快速修改小车的指令程序,使小车不仅可以人工操控,还可以自主完成特定动作。小车控制系统主板采用小型化、低功耗、高可靠性、多层化及抗干扰设计,同时预留足够控制接口,方便系统扩展[2]。
2.2 小车通讯模块
小车使用手机客户端APP进行控制,小车本身通过ESP8266 Wifi模块发射2.4 GHz的无线信号,手机连接此Wifi信号后通过客户端APP实现小车的遥控和遥视。机器人、云台和摄像头调焦的控制信号通过2.4 GHz无线信号传到位于竖井底部的无线中继路由器上(无线中继路由器可以延长机器人的控制距离,但是并不是必须的,小车和手机可以直接相连),无线传输模块发出无线信号,机器人上的无线接收模块接收后通过解码变成控制信号,对机器人、云台和摄像头进行控制[3],小车的整体实物图如图2所示;同时各种传感器采集的数据通过无线模块发送到手机APP端实时显示。
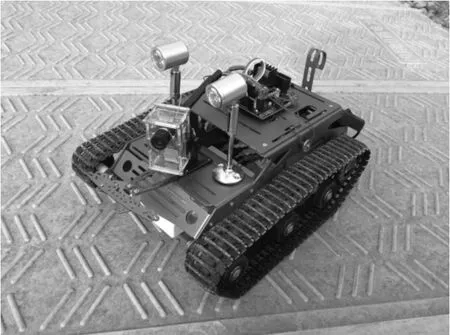
图2 智能电缆沟机器人实物展示
2.3 云台控制及照明
摄像头带有LED照明功能,安装在二自由度的云台上面(云台1可以进行上下旋转,云台2可以进行左右旋转)。在进入电缆沟深处的黑暗路段时,小车自带的“LED光源”可以为小车提供照明,200 LM的光通量可以保证小车前方及可视范围内的空间清晰可见。使用了云台,可以自由地旋转摄像头到任意角度检查电缆沟内的情况。由于使用了照明功能,即使在没有光照条件下也能清楚看到电缆沟内的情况。小车结构为窄体式设计,最大宽度35 cm,可进入50 cm宽的最窄型电缆沟,替代人工或任何机械进行检查;同时由于体积小巧,具有很强的便携性,目前,适用此类电缆沟的小车及小车技术国内研究领域为零。
3 小车的使用方法
电缆沟巡检小车依托先进的物联网技术、手机APP技术和移动互联技术,可以将深处地面之下的小车的实时视频信息传回至手机,同时可以通过手机APP来控制小车的运动[4]。功能主要实现:使用时,打开一块电缆沟盖板,使用拉闸杆挂钩将小车放入电缆沟内,如图3所示。由于小车体积小,且安装有履带,可以在电缆沟底部中间的落水槽上移动。登录手机客户端APP连接与小车控制系统集成的无线模块,在手机客户端操作界面可以直接查看小车摄像头传输回来的实时画面;同时可以操作小车的行动,当在巡视过程中发现异常时,可以实时拍照和录像。

图3 现场工作将巡检小车放入电缆沟的过程
电缆沟巡检小车主要为解决在人工检查“电缆沟杂物、积水、电缆脱落情况,检查电缆沟内防火隔墙封堵情况,检查电缆沟内小动物活动情况”过程中,检查电缆沟时间长,检查电缆沟过程中容易造成人员伤害的问题。
4 电缆沟巡检小车关键技术
a) 实现手机客户端APP实时遥控小车。通过使用手机客户端APP可以方便快捷地实时遥控小车,只要将APP安装在任意安卓手机上即可实现相应功能,后期成本低[5]。
b)通过移动互联技术,实现遥视小车。在电缆沟的巡视检查过程中,利用移动互联技术远传图像,最远可以将28 m外(中继路由器情况下90 m至1.5 km)视频数据实时回传。
c)手机客户端具有照相和录像功能。可以将小车第一视角的图像进行实时的记录,方便后期进行查看。
d)模块化组装,满足量产需求。小车整体分为遥视控制部分、底盘动力部分、照明组件部分、无线信号传输等4大部分。装置核心处理系统有完整的印刷电路板PCB(printed circuit board) 电路板图[6],能满足快速量产需求;其他零部件也均为模块化设计或现成产品,与核心处理部分接口连接即可,可满足快速组装及维修要求。
e)整套小车装置成本低,拥有完整自主知识产权。本项目已经申请专利,小车所有组件及核心控制程序全部为运维人员自己研发,不依托于外部厂家;每台巡检小车成本约4000元,远远低于相关小车生产企业的售价。
f)体积小,动力强,光照效果好,适应性强。由于各个变电站电缆沟尺寸不一,且电缆沟内有杂物堆积,轻巧的机身能够在绝大多数电缆沟中自由穿行,履带式底盘可以轻松跨越各种障碍物;动力强劲,可上42°斜坡;双履带分步驱动,可实现原地转向,适应更狭小空间。
g)不需要连接外网,信息安全可靠。使用2.4 GHz的频率传输实时数据和控制信号,对变电站内设备无干扰。
5 结论
使用手机客户端APP作为上位机系统突破了终端的限制,只需一部安卓智能手机即可通过安装使用此款APP来操控小车,适用性极强,易于上手,后期无维护成本。电缆沟巡检小车在大大提高工作效率、缩短检查电缆沟时间的同时,保证了人身安全,可以避免人员进入电缆沟带来的各种伤害和不适,实验效果好,便利性高,可推广性强,具有极其重要的实际生产意义。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
电子元器件与信息技术(2022年1期)2022-03-26
摄影之友(影像视觉)(2020年2期)2021-01-14
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2019年23期)2019-02-23
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电气化铁道(2016年2期)2016-05-17
