
助飞式水声对抗器材落点测量方法及误差分析
2019-01-28 01:11费志刚陈宝柱
船电技术 2019年1期
黎 阳,费志刚,陈宝柱
助飞式水声对抗器材落点测量方法及误差分析
黎 阳,费志刚,陈宝柱
(91388部队92分队,广东湛江 524022)
助飞式水声对抗器材落点精度海上试验因海况、测量手段等因素限制一直是试验的重难点问题。本文从分析助飞式水声对抗器材基本工作原理和其落点精度影响因素入手,即光学定位法、水声定位法、人工定位法和遥测定位法四种落点精度海上试验的测量方法。对四种测量方法的优势、劣势进行了对比分析,提出了一种基于Matlab软件的数据处理方法,并对测量结果的误差进行了对比分析,综合提出了根据海上试验环境条件和测量保障条件进行海上试验的优选原则。
助飞式水声对抗器材 落点 测量方法 误差
0 前言
助飞式水声对抗器材(以下简称助飞器材)具有发射距离远、布放迅速,有利于迅速形成多层次、多手段的对抗配置等优点,担负着未来海战中对抗来袭鱼雷攻击的使命任务,助飞器材落点精度是其关键指标,影响到整个对抗态势是否能有效达成,直接导致水下对抗的成败。助飞器材具有体积小、速度快、散布大等特点,在单机试验时可在陆上靶场进行飞行试验,准确测量其落点位置,计算落点精度。助飞器材装舰后由于受发射装置误差、海上实际作战条件等因素影响,其误差与单机误差相比有较大不同。在大型水面舰定型试验时需在海上测量其落点位置,由于受海况、发射时机、发射参数、测量手段等因素影响,助飞器材落点定位问题一直是试验的难点问题。通过分析助飞器材落点精度影响因素,提出其试验方法和误差估计,优选试验方案,对于科学考核大型水面舰助飞器材落点精度具有重要的现实意义。
1 落点精度影响因素分析
助飞器材基本的工作原理是在点火发射后,到达预定的时间进行分离,声学分机入水后发声工作,对鱼雷进行干扰和诱骗,其飞行弹道如图1所示。分析助飞器材发射过程,声学分机入水点的精度主要受以下因素影响。
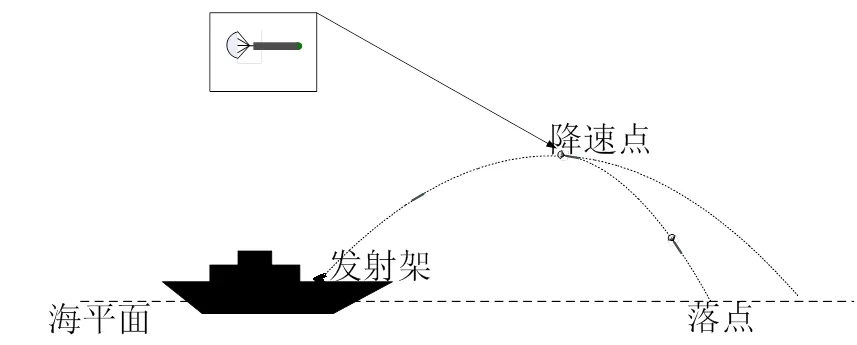
图1 助飞器材飞行弹道示意图
1)发射参数计算影响。发射装置收到发射命令后计算并装订发射参数,发射参数计算是否正确、发射装置机械精度直接决定了助飞器材落点精度。
2)助飞器材自身的落点精度影响。助飞器材分离时间、降落伞大小等自身因素引起的误差也将带入最终的落点精度。
3)发射舰的航速影响。发射舰航速越高,因惯性影响助飞器材发射后偏差越大。可以通过仿真计算对误差进行估计,在发射装置设计时可根据发射时航速通过发射参数自动调整修正该误差。
4)发射舰的纵横摇的影响。受海况影响,发射时发射舰的纵横摇将直接影响助飞器材是否按照预定的方向出管飞行,该因素影响可以通过发射装置自适应系统进行修正。
5)海区风速、流速等环境影响。助飞器材在下降过程中受风速的影响会产生偏移,助飞器材入水后也会随着海流产生漂移。
6)测量设备测量误差影响。使用光测、遥测水声测量等手段可对助飞器材入水点进行定位,但视测量手段的不同测量结果也会带来相应的误差。
以上助飞器材落点精度的影响因素中,除e和f是由于测量过程中测量设备或人为因素带来的影响,需要对试验结果进行修正外,其他因素均为被试品自身性能或其适应复杂环境条件带来的误差,不需要进行修正。
2 助飞器材落点测量方法
助飞器材落点精度试验,是为了考核助飞器材发射后实际入水点相对于理论入水点的散布是否满足指标要求,理论入水点通过发射位置进行计算,而实际入水点定位是本项试验的关键。下面分析几种常见的助飞器材入水点定位方法。
2.1 光学定位法
光学定位法是利用光学原理对助飞器材进行飞行弹道参数测量、落点图像记录等,最后通过对拍摄的图像进行对比判读进行入水点定位,一般采用直升机、无人机或辅助船上一个或多个摄像机对助飞器材入水点进行拍摄测量。试验后根据图像中海面参考点的位置相对于助飞器材位置计算助飞器材入水点,或采用多台摄像机拍摄交汇计算助飞器材的飞行弹道,进而得到助飞器材的入水点位置。

图2 光学定位法示意图
光学定位法的优点是测量范围广、精度高,测量结果可视化程度高,便于事后分析判读;缺点是由于助飞器材目标体积较小,当海况较差、海上浪花较多时容易造成目标判读困难或判读错误,导致测量的数据无效。
2.2 水声定位法
水声定位法是利用多个水听器同时监听器材发射的噪声而进行定位。海上试验前在助飞器材理论入水点区域水下布放多个水听器阵,利用助飞器材入水后发声工作的特点进行测量,当三个水听器阵同时监听到助飞器材发声后,可交汇计算助飞器材入水点位置。
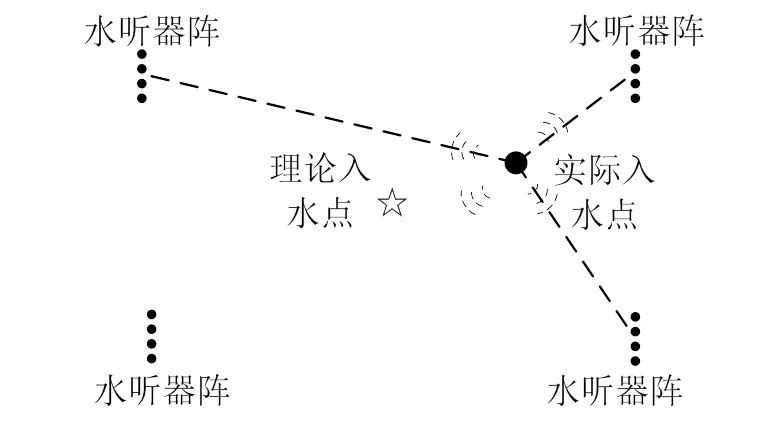
图3 水声定位法示意图
水声定位法的优点是利用助飞器材连续发声来判断目标位置,测量的目标准确度高,缺点是测量系统组成复杂,测量阵布放入水后位置无法调整,对于无法预估落点位置的情况无法进行测量,同时受水文条件影响大,测量区域小,测量精度较差。
2.3 人工定位法
人工定位法是待助飞器材入水后,高速快艇从安全区域迅速航行至助飞器材入水点,GPS对助飞器材入水点进行定位。

图4 人工定位法示意图
人工定位法由于是人为确定目标位置,因此测量的目标真实;但由于试验安全考虑,在助飞器材入水后高速快艇才从安全区域航行至入水点,存在找不到助飞器材,测不到数据的风险,且由于洋流的影响,测量的误差也较大,海况较差时还存在高速快艇航行安全的风险。
2.4 遥测定位法
遥测定位法是在助飞器材的弹体上加装合作信标,助飞器材发射后实时向试验母船上接收设备发送自身的位置信息,该方法可以计算出助飞器材的全弹道,其中最后一帧位置信息可作为助飞器材入水点位置。

图5 遥测定位法示意图
遥测定位法的优点是测量方法方便快捷、精度高,能测量助飞器材的全弹道,便于分析助飞器材是否飞行正常;缺点是需在助飞器材上加装合作信标,可能对助飞器材飞行性能有一定影响,同时助飞器材飞行速度快,且空中有分离动作,可能导致合作信标工作不可靠,无法测量有效数据。
3 数据处理方法及误差分析
助飞器材落点精度试验的目的是测量每一枚助飞器材实际落点位置与理论落点位置的偏差,与指标值进行比对,分析其是否达到要求。测量到器材入水点位置后可按以下方法进行数据处理。
3.1 数据处理方法
作为应用广泛的数学软件,具有强大的数值运算、图形显示和符号运算功能,在数字信号处理方面也开发了相应的工具箱,并应用在水声信号处理中。
本舰运动要素、本舰发射位置、器材入水位置为输入数据,软件中通过极坐标画图函数生成方位落点图,如图6中所示。程序部分关键语句如下:
3.2 误差分析
误差分析的目的就是评定试验数据的精确性,通过误差分析,认清误差的来源及其影响,并设法消除或减小误差,提高试验结果的精确性。下面对四种测量方法的误差进行对比分析。
1)光学定位法
光学定位法测量误差主要是由图像判读误差和大地坐标定位误差引起。其中图像判读误差是主要误差源,受图像分辨率影响误差一般可达到10米以内。
2)水声定位法
水声定位法测量误差主要是由水听器阵大地坐标定位误差、水听器阵接收灵敏度、海洋环境的干扰噪声等因素引起,综合测量误差一般可达到100米以内。
3)人工定位法
人工定位法的误差主要由快艇大地坐标定位误差、从器材入水至人工定位期间助飞器材飘移产生的误差引起。其中飘移的误差随人工搜索定位的时间增大而加大,该误差可根据试验海区的流速流向进行适当修正,综合测量误差一般可达到50米以内。
4)遥测定位法
遥测定位法的误差主要受遥测设备大地坐标定位误差、接收灵敏度等因素影响,综合测量误差一般可达到10米以内。
通过以上误差对比分析可以看出,在测得入水点位置数据为真目标的前提下,光测和遥测定位数据相比水声定位和人工定位数据误差小,但是光测和遥测数据也存在判读的目标为假目标,或在试验中未采集到试验数据的可能。
由于助飞器材是在入水后通过发射强噪声和回波对鱼雷进行干扰和诱骗,其作用距离远,在作战使用时只要将助飞器材布放在鱼雷搜索扇面以内即可,因此对助飞器材的落点精度要求不高。以上四种方法均可以满足试验要求,但又各有局限性。试验时应根据试验保障条件、试验海区气象等因素综合衡量选择一种方法进行测量,有条件时可同时选择两种以上方法同时进行测量,当两种以上方法同时测量到助飞器材入水点有效数据时,则选择精度高的一种作为最终试验结果进行处理。
4 结束语
助飞器材落点精度是大型水面舰水下防御的重要考核指标,其试验方法受试验保障条件制约较大,特别是当试验时海况高、能见度较差时,用常规方法测量其落点位置更为困难,因此在后续新型助飞器材设计时应考虑到测量需求,将遥测合作目标集成在助飞器材中或研制飞行弹道、物理特性与实际助飞器材一致的试验用弹,具备自身定位功能,在试验时实时将自身位置发送至接收设备,从根本上解决助飞器材落点测量的难题。
[1] 李君桥, 岳剑平, 冼观福, 印勇. 基于多普勒频移的水下运动目标测距技术[J]. 声学技术, 2008, 27(5): 758-760.
[2] 韩建辉, 杨日杰, 高学强, 王伟. 空中声源的水下声预警研究[J]. 声学技术, 2008, 27(5): 671-673.
[3] 刘秀丽, 冯海泓, 黄敏燕, 等. 基于单基元几何交汇法的被动目标测距测速研究[J]. 声学技术, 2007, 26(2): 173-178.
[4] 吴国清, 马力. 利用辐射声多线谱的多普勒进行距离估计[J]. 声学技术, 2006, 27(2): 140-145.
[5] 曲宝忠, 贾旭山. 武器装备试验鉴定中的误差分析[J].中国海上靶场, 2015, (08): 4-6.
[6] 周伟江, 李楠. 海上动态RCS测量主要误差因素分析[J]. 海上靶场学术, 2013, (7): 32-35.
[7] 董阳泽, 许肖梅, 刘平香.水声对抗中的水声网络及其对抗[J]. 火力与指挥控制, 2011, 36(7): 1-6.
[8] 董阳泽, 许肖梅, 刘平香. 线导鱼雷及其对抗仿真研究[J]. 厦门大学学报(自然科学版), 2009, 48(2): 220-227.
[9] 丁翠环, 杜召平, 韩硕. 长基线水声跟踪定位系统精度分析[J]. 声学技术, 2014, 33(5): 182-185.
[10] 于平, 丁翠环, 于莉. 水声定位精度的评估标校方[J]. 舰船电子工程, 2010, 191(5): 194-196.
Placement Measuring Method and Error Analysis of Assisted Flight Underwater Acoustic Confrontation Equipment
Li Yang, Fei Zhigang, Chen Baozhu
(Army Unit 91388, Zhanjiang 524022, Guangdong, China)
TM666.7
A
1003-4862(2019)09-0032-04
2018-08-20
黎阳(1977-),男,工程师。研究方向:水声对抗装备试验鉴定。E-mail: baoliang747@126.com
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
一重技术(2021年5期)2022-01-18
空间科学学报(2021年6期)2021-03-09
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
太空探索(2016年12期)2016-07-18
