结合超像素和卷积神经网络的国产高分辨率遥感影像云检测方法
2019-02-15 04:56,,
测绘通报 2019年1期
,,
(1. 东莞市测绘院,广东 东莞 523129; 2. 辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000; 3. 中国测绘科学研究院,北京100830)
随着遥感技术的快速发展,遥感影像已广泛应用于科学研究、社会服务等各个领域。在国内,以高分一号、高分二号、资源三号等为代表的国产卫星各项指标趋近国际先进水平,国产卫星影像的质量和数据量迅速增加,市场化程度较之前有了极大提升,在社会各领域发挥了重要作用[1]。然而,并非所有的遥感影像都可直接用于工程项目与研究实践,其中一个重要的限制因素是由于云覆盖导致星载卫星获取的影像一般都含有云层,且占比较大,一般在50%以上[2]。云层的存在不仅覆盖了地表信息,也给影像的配准、融合、影像信息提取等处理造成诸多影响,因此对遥感影像云检测和去除是非常有必要的[3],但目前的影像云检测和去除技术还存在着瓶颈。
近几年,许多学者提出了多种遥感影像云检测方法,其中光谱阈值法是当前云检测领域中最简单有效的算法之一。该方法主要是利用遥感影像光谱特征,即根据云在可见光波段或红外波段反射率或亮温值与其他地物光谱特征的差异,通过亮度阈值将目标云层与非云地物进行分离[4-5],其亮度阈值的确认常用经验阈值或基于最大类间方差(Otsu)原理的自动阈值。此类云检测方法具有计算简单、监测效率高等优点,但是也存在较多的缺陷,如要求影像具有热红外波段信息、监测精度略低、产生误判等。文献[6]采用改进的颜色转换模型,生成影像修正图,然后利用Otsu阈值分割提取纹理信息生成云种子图,相比传统云检测方法,精度提升了10%以上。文献[7]将最大类间自适应阈值(Otsu)应用到遥感影像云检测中,获得了较好检测结果,但要求被检测遥感影像需要有足够多波段。目前,市场上的国产高分卫星影像一般含有蓝、绿、红、近红外4个波段,其波段范围为0.43~0.90 μm[8],因此基于阈值的云检测方法难以在国产高分辨率影像上体现优势。
基于云层和地物纹理特征差异,通过提取特征组合(如灰度共生矩阵、Gabor纹理特征等)来区分云和地物,是另外一种效果较好的遥感影像云检测方法。但由于光学遥感影像上的云特征多样,不同的云特征在特征组合中的分布并不典型,使用纹理差异进行云检测尚存在一定难度[9]。部分改进的基于纹理特征的云检测算法[10]在一定程度上提升了云检测精度,但存在着训练分类器耗时、费力、难以满足海量影像数据自动提取等缺陷。
卷积神经网络是一种典型的深度学习算法,其模型参数可通过梯度下降方法进行网络训练获得,避免了对图像前期的复杂预处理过程,且经过训练的卷积神经网络能够充分挖掘影像中的特征,高效完成遥感影像的云检测[11]。
针对国产高分辨率遥感影像云检测现存问题,本文提出基于卷积神经网络的高分辨率遥感影像云检测方法。基本思路为:首先采用主成分分析(principal component analysis,PCA)非监督预训练网络结构;其次利用少量标签数据对网络结构进行微调;然后采用超像素分割方法进行影像分割,并将影像块输入已训练卷积神经网络中进行云检测;最后将检测结果影像块拼接,完成整幅影像的云检测。
1 原理与方法
1.1 卷积神经网络
卷积神经网络(CNN)是受生物神经学知识启发并参考其结构原理结合人工神经网络而产生的开创性研究成果之一,是一种具有深度学习能力的前馈人工神经网络系统,典型的卷积神经网络模型主要由输入层、卷积层、采样层、全连接层等几个部分组成[12]。与传统神经网络相比,卷积神经网络具有适用性强、特征提取与分类同时进行、泛化能力强、全局优化训练参数少等优点,已逐渐成为目前学习领域的研究热点[13]。其原理结构如图1所示。
卷积神经网络的工作过程为:首先目标影像(输入影像)通过卷积层进行卷积运算,并通过采样层对卷积输出特征图进行下采样,然后经过多次的卷积运算和下采样处理,最后通过全连接层对提取的特征影像进行分类,输出目标结果。
本文采用Gi表示卷积神经网络第i层的特征图,卷积过程可以描述为[14]
Gi=f(Gi-1⊗Wi+bi)
(1)
式中,Gi表示卷积神经网络第i层的特征图;符号“⊗”表示第i层影像与第i-1层特征图进行卷积运算;Wi表示第i层卷积核的权值向量;bi表示偏移向量;线性激活函数f(·)表示卷积过程中第i层的特征图像Gi。
通过卷积神经网络计算之后的特征图,特征维度一般在百万数量级,如果直接训练分类器,很容易导致过拟合现象发生[15]。因此,在卷积运算之后需要对影像特征图进行下采样,即池化操作,同时为避免在池化操作中的信息损失,一般常采用概率最大化进行池化操作。
假定采样块Xn中有一个神经元是激活状态,则采样值Pn就产生响应,否则不响应,池化过程可表示为
P(Pn|i)=eGi-1⊗Wi+bi/(1+eGi-1⊗Wi+bi)
(2)
传统全连接层参数巨大,会导致过拟合问题。因此本文在设计网络框架时,考虑将最后全连接层由全最大化池化层代替。本文设计深度卷积神经网结构如图2所示。
1.2 卷积神经网络训练
卷积神经网络训练时需要大量样本,而实际建立样本库需要大量的时间和人力。针对此问题,本文采用半监督分类方式训练卷积神经网络,在保证训练样本的同时可有效提升训练效率。

(3)
采用主成分分析方法最小化重构误差求解特征向量[17]
(4)
式中,IH为H×H单位矩阵;V为协方差矩阵XXT的前H个特征向量。V可以表示输入影像块的主要特征。主成分分析初始化卷积神经网络的滤波器组Wh可以表示为[18]
Wh=mg1g2(Vh)h=1,2,…,H
(5)
式中,mg1g2(Vh)表示将向量V映射到矩阵Wh,Vh表示影像的第h个主要特征。
通过主成分分析监督预训练网络结构,得到网络初始权值参数,再通过云标签数据对整个网络进行微调。本文训练卷积神经网络流程如图3所示。
1.3 超像元生成算法
为了避免将整幅影像输入卷积神经网络进行云检测效率低的问题,在云检测之前需要对遥感影像进行分块预处理。本文在顾及遥感影像像元的光谱特征和空间特征的基础上,采用简单线性迭代聚类算法(simple linear iterative cluster,SLIC)[17]生成超像元,以提高分类精度。
采用像元光谱在N波段上与生成所有超像元欧氏距离之和来描述光谱特征相似,其可表达为[21]
(6)
式中,j表示影像波段数;k表示原始影像的第k像元;d1表示像元光谱在N个波段上与超像元欧氏距离之和。
采用像元和超像元在平面坐标系的距离来描述空间特征,其表达式为
(7)
则最终的SLIC聚类函数可定义为
(8)
式中,S是控制超像元间的紧密程度的参数,其范围一般控制在[1,40],该参数表示XY空间的最大可能值。为防止超像元的聚类中心落在边界点或噪声像元上,在聚类中心4×4邻域中寻找像元光谱梯度最小的点,作为新的超像元种子点,迭代完成超像元生成。
1.4 云检测技术思路
基于卷积神经网络的高分辨率遥感影像云检测方法主要实现步骤如下:①采用半监督分类方式训练卷积神经网络;②对待检测遥感影像进行分块预处理;③对待检测遥感影像进行超像素分割;④以超像素聚类中心为中心,将影像划分为64×64像素和32×32像素影像块;⑤将影像块输入已训练卷积神经网络中进行云检测;⑥最后将检测后影像块拼接,完成整幅影像的云检测。
本文高分辨率遥感影像云检测技术流程如图4所示。
2 试验与分析
2.1 试验及结果
本文试验采取Linux下的TensorFlow深度学习框架,硬件环境为CPU Intel(R) Xeon(R)E5-2630,GPU Nvidia Tesla M40 32GB内存。
本文构建的卷积神经网络结构如图1所示,含两个卷积层、两个池化层、一个全连接层:第一层卷积滤波器设置为340个,第二层卷积滤波器设置为200个,滤波器大小均设置为5×5,采样间隔设置为1,采用概率最大化进行池化。在云检测之前,首先将待检测遥感影像进行简单线性迭代聚生成超像元影像,以超像素聚类中心为中心,将影像划分为64×64像素和32×32像素影像块,最后将卷积神经网络学习的云特征输入Softmax分类器完成影像云检测。本文试验的云检测结果如图5(b)和图5(e)所示。
为验证本文云检测方法的有效性,笔者将本文云检测结果与文献[7]提出的带有限定条件Otsu云检测方法进行对比(文献[7]Otsu阈值云检测结果如图5(c)和图5(f)所示)。试验选取资源三号遥感影像和高分一号遥感影像为数据源,其中资源三号影像为多光谱影像,空间分辨率为5.8 m,大小为600×600像素,研究区域主要是薄云和厚云,如图5(a)所示;高分一号影像为多光谱影像,大小为600×600像素,研究区域主要是厚云,如图5(d)所示。在选择云标签数据方面,本文综合考虑研究区域的云分布情况,综合选取300个云标签数据对卷积神经网络微调。
2.2 定性评价及定量评价
从图5(b)和图5(e)可以得出,本文云检测方法结果云边界清晰和完整,且能很好地识别薄云和面积较小云层。从图5(c)和图5(f)可以得出,文献[7]Otsu云检测结果存在“椒盐”现象,易将反射率较低的云层检测为地物,并且易将高反射率的地物误检为云。如在资源三号遥感影像中,存在将高反射率建筑物误检为云;在高分一号遥感影像中,将高反射率地物误检为云。综上所述,通过目视评价方法,本文云检测方法试验结果优于文献[7]Otsu云检测方法的结果。
为了定量评价本文云检测试验结果,本文采用人工目视解译方式勾取的云区域作为真值,并采用总体精度(OA)和Kappa系数两个评价指标与试验结果进行定量评价。其中,人工目视解译方式勾绘原则设定为:①针对云边界模糊区域勾绘精度控制在4个像素以内;②针对云边界清晰区域勾绘精度控制在1个像素以内。最终评价结果见表1。
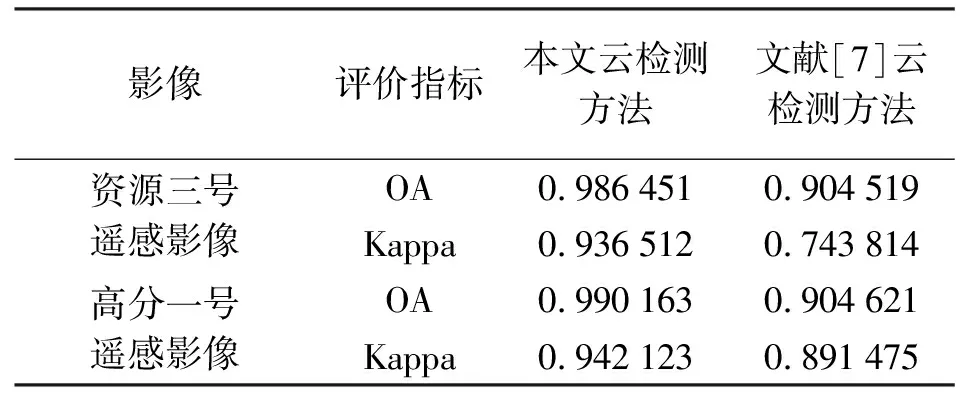
表1 不同云检测方法的评价结果
由表1可知,与文献[7]云检测方法相比,本文云检测方法在两幅遥感影像云检测中精度较高。其中资源三号遥感影像云检测总体精度为0.986 451,比文献[7]云检测方法高出8.193 2%;高分一号遥感影像云检测总体精度为0.990 163,比文献[7]云检测方法高出8.554 2%。本文云检测方法在两种不同数据源云检测的总体精度均在98%以上,Kappa系数均在93%以上。通过定量评价方式,说明本文将深层卷积神经网络算法应用于国产高分辨遥感影像云检测中,能有效提高云检测精度。
3 结 语
针对国产高分辨率遥感影像的云检测,本文提出了基于卷积神经网络的高分辨率遥感影像云检测方法。通过试验分析,该方法在一定程度上可弥补传统Otsu方法、多光谱综合法的不足。传统Otsu云检测方法主要不足表现为高反射率地物如建筑物、裸地、雪很容易产生误判,而本文提出的云检测方法检测精度高,误判较少,适合国产高分辨遥感影像云检测,并且不受光谱范围限制。
通过本文研究发现,卷积神经网络算法在国产高分辨率遥感影像云检测领域有着较大潜力,本文提出的基于卷积神经网络的高分辨率遥感影像云检测方法还存在许多不足。如没有判断本文卷积神经网络的层次结构和参数设置是否最优;没有引入其他特征参与云检测(纹理特征、相关指数特征等)。在接下来的工作中,拟将纹理特征引入高分辨率遥感影像云检测中,期待进一步提高云检测精度。
猜你喜欢
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
健康体检与管理(2021年10期)2021-01-03
临床骨科杂志(2020年1期)2020-12-12
智能计算机与应用(2020年4期)2020-08-31
雷达学报(2020年3期)2020-07-13
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2018年1期)2018-04-20