
基于人因工程学的智能座椅设计*
2019-02-19 08:32曹学晨闫龙张鸿任森丽王迎嵩
科技与创新 2019年3期
曹学晨,闫龙,张鸿,任森丽,王迎嵩
基于人因工程学的智能座椅设计*
曹学晨,闫龙,张鸿,任森丽,王迎嵩
(山东工商学院 管理科学与工程学院,山东 烟台 264005)
学习桌椅应体现人文关怀,为引导学生建立健康学习方式而设计。目前市场销售的学习桌椅存在着不少设计方面的缺陷,如果学生长时间使用这类不良桌椅,必然会导致一系列不良姿势,并从姿势性变异发展为习惯性变异,导致结构性病变,不仅导致学习效率低下,而且严重损害人体健康。针对青少年眼部疾病、脊椎病、上肢及下肢疾病等四类常见病的成因,综合行为学、美学、医学等多个学科,从健康的角度,特别是在行为导向方面,对青少年学习桌椅进行了改良设计。
人因工程;机械设计;TensorFlow;质量控制
对儿童时期座椅进行调查发现,儿童座椅很难长时间使儿童保持科学坐姿,违反了儿童时期身体骨骼较柔软、脊椎未定型,心理上自制力、危害预见性差以及行为上活泼好动等客观规律。错误的坐姿和市场上普遍存在的传统座椅都不利于长时间维持人体脊柱的正常生理曲度。如果学生长时间使用这类不良座椅,会引发一系列姿势性变异,严重损害人体健康。在现代市场椅子不能满足家长需求的情况下,我们结合综合行为学、人因工程学、人体力学、电学等多个学科,从健康的角度,横跨技术、人因、心理、市场四个层面,对儿童学习座椅进行了改良设计,经过反复测试和实验,不断探索各项科学合理的设计指标,提出了基于人因工程学的智能矫正儿童座椅的设计设想和方法。
1 研究思路
智能坐姿矫正儿童座椅利用人因工程学对座椅进行了设计,根据GB/T 14774—1993《工作座椅一般人类工学要求》以及儿童身体结构尺寸对座椅进行了坐姿生理解剖、尺寸设计,根据椅面体压分布设计了合理舒适的坐垫,结合坐姿下的股骨、肩部、小腿与背肌设计了学习休息相结合的新型坐跪两用式儿童座椅。座椅整体采取三向受力、多点支撑的方式——身体前倾式,可长时间、有效地保持人体脊柱正常生理曲度。座椅上装配的传感器实现了座椅的智能化以及数据反馈,压力传感器用于检测儿童学习时的重心位置,从而来判断儿童坐姿是否标准,通过蓝牙将数据实时传输给家长手机达到实时监控的效果,座椅扶手上的OLED显示屏用于反馈儿童的学习时间和坐姿数据,同时在儿童坐姿不标准时报警。儿童智能座椅设计框架如图1所示。通过对座椅的力学分析,智能坐姿矫正儿童座椅设计了S-KTG同步休息靠背式机械结构,使靠背与坐垫同时根据儿童休息需求移动;类H型防翻底座保证了儿童休息时座椅后倾翻倒;自锁式座椅轮通过简单的刹车机构使座椅不受力时可自由移动,儿童坐下后椅轮抱死无法移动;可调高座椅可以使较低年龄段的儿童坐在相对舒适的高度学习。儿童在保持坐姿的时候能够自动校正,家长也可以随时监控孩子的身体情况。
儿童座椅在结构方面相比较传统座椅增加了膝枕,同时从根本上改变了儿童的不良学习坐姿,使儿童重力分布更均匀,并且可减少肌肉和韧带的应力对上身平衡的影响,同时缓解上臂、颈部和背部的疼痛以及对大腿部位的压迫导致的麻木,有助于血液循环;大范围采用高密度聚乙烯(兼有塑料与金属的优良性能,而且不生锈,无污染)、聚丙烯(更易降解)、绿色染料等更加环保、节省成本的材料。
在研究过程中将整个项目分为了两个阶段:①前期设计。通过上网查阅相关资料,整理分析其生产过程的可行性、座椅材料方面的各种可能性与可行性,人因工学儿童学习椅在市场上的需求、前景和竞争力。传统人因工程学座椅是对普通成年人的尺寸进行研究,我们以此为依据结合实际实地调研对普通儿童尺寸分性别与年龄段进行综合测量得出适合儿童的座椅尺寸。②功能实现。借鉴人因工程学和GB/T 14774—1993《工作座椅一般人类工学要求》,总结出传统儿童座椅存在的弊端。利用传感器与物联网工程对传统座椅进行革新,使座椅更加智能化,将工作时间与坐姿调整数据化,做到更好的人机反馈。利用3ds Max建立空间几何模型,初步确定座椅结构、座椅尺寸,将改良点与创新点可视化。在实体座椅中加入压力传感器、蓝牙、OLED显示屏等电子模块以及脚轮自锁结构、S-KTG气弹簧联动机构,类H型底座等机械结构。安排实验人员进行实际操作与体验,通过体验式的监测来确定座椅功能是否完善可行。测试电子模块以及机械结构是否达到理论预期以及预期运行流畅度,在此基础上进行微调。
2 座椅整体研究与设计
2.1 椅面高度
椅面高度一般指椅面至地面的高度。椅面高度的设计应比“小腿加足高”略低一些,避免就坐者的大腿紧压在座椅前缘或就坐时足够不着地面,造成生理疲劳。儿童的身高在青春期前平均每年长高3~4 cm,进人青春期后,身高以平均每年长高6~8 cm的速度增长,有些孩子的年增高量甚至在10 cm左右。因此,椅面高度的可调节功能延长了儿童座椅的使用年限,降低了家长的经济成本。
本产品目标人群为7~12岁的学龄期儿童,根据国家标准GB/T 26158—2010《中国未成年人人体尺寸》进行查阅设置座面的高度。
参考我国7~10岁女童5百分位数膝高数值和11~12岁男童95百分位膝高数值并增加适当的着装修正量和心理修正量,将椅面高度初始数值定为340~500 mm。
2.2 深度和宽度
设计座椅深度一般以“臀膝距”尺寸作为参考。同龄的男童与女童相比,女童的平均臀膝距大于男童,取11~12岁女童第5百分位数的3/4作为设计依据,结合适量的修正量设置椅深为350 mm。同理学习椅座宽的设定应该以同年龄段较高百分位的女童臀宽设定,参考我国11~12岁女童95百分位臀宽数据和修正量,座椅宽度设定为360 mm。国家标准GB/T 26158—2010中,7~10岁男性、女性未成年人人体尺寸百分位表分别如表1、表2所示。
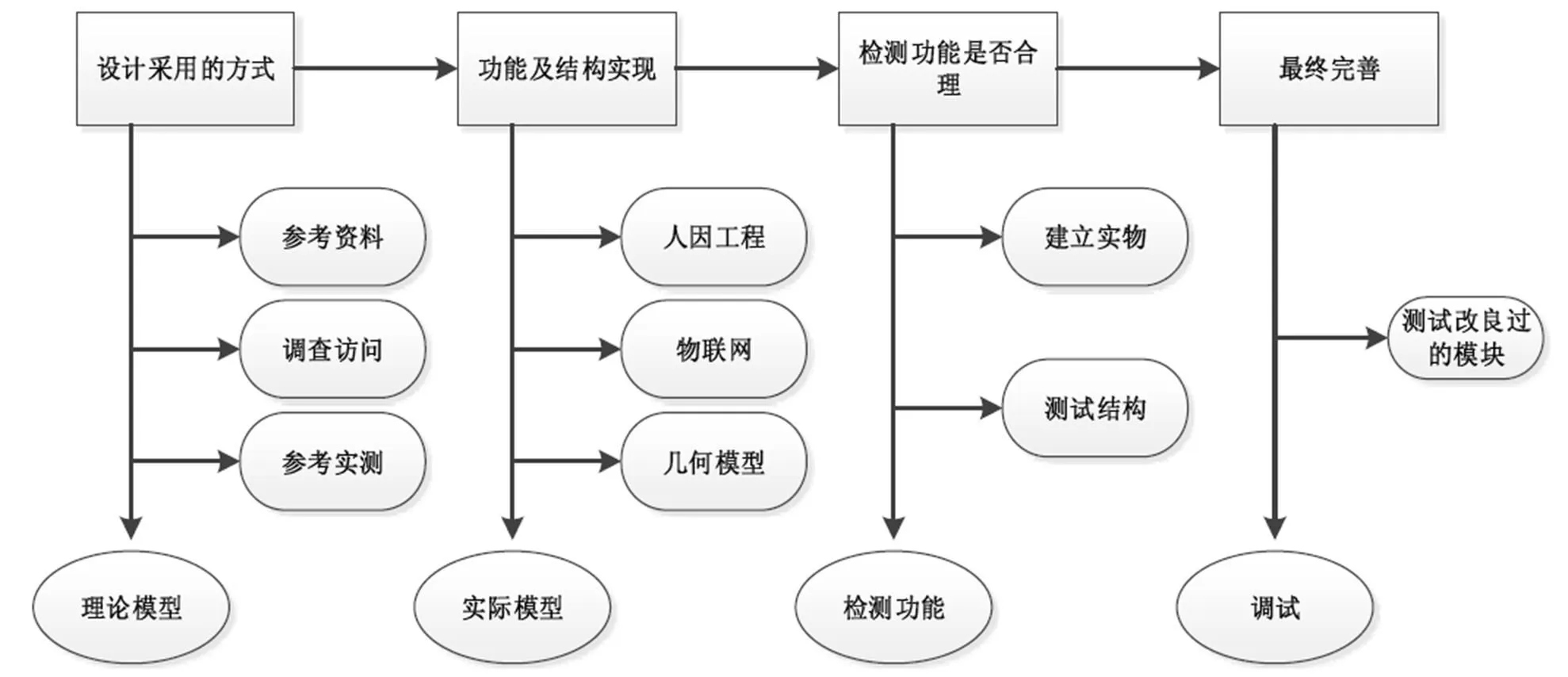
图1 儿童智能座椅设计框架
表1 国家标准GB/T 26158—2010:7~10岁男性未成年人人体尺寸百分位表(单位:mm)
测量项目百分数 P1P5P10P25P50P75P90P95P99 体重/kg17.920.321.423.927.933.640.946.455.3 身高1 1301 1871 2141 2601 3201 3801 4311 4621 525 膝高325343353371393417436449468 腘高263280288302324342360371389 臀宽200212218231247269292306331 臀膝距358381391413440466492509535 臀腘距292311322341364388409423446
表2 国家标准GB/T 26158—2010:7~10岁女性未成年人人体尺寸百分位表(单位:mm)
测量项目百分数 P1P5P10P25P50P75P90P95P99 体重/kg17.119.220.322.726.031.036.841.050.0 身高1 1251 1701 1981 2461 3061 3701 4291 4661 543 膝高323338350367389411432446469 腘高263277285300320339357368387 臀宽195201216227244263282299323 臀膝距362382394413439465490508538 臀腘距296316326345366391413428456
2.3 坐垫
坐垫的主要目的是使使用者的体重能够较均匀分布在椅面。椅面坐垫过软过厚,缺乏反向力,使腰推下沉弯曲、腰腹肌肉松软、脂肪积聚,甚至还影响肌肤的温湿平衡,引发皮肤病,并妨碍男孩的性发育;座椅面过硬,坐骨隆起部分及其外包的皮肉首先抵触到座位面,久坐后容易使这个部位有麻木、酸痛的感受。所以我们设置软度和形态特点与人体相适应的人体工学曲面U型设计坐垫,贴合臀部,久坐不累。坐垫选用麻绒或皮质,填充物为新棉。
2.4 座椅面倾角
跪式座椅设计时,座面前倾角应不小于15°,当小于此值时,腿部支撑将失去作用。随着座面前倾角度的增大,人体的重心也随之前倾,身体的重量逐渐转移到腿部,使得腿部支撑上的压力和接触面积都随着座面倾角的增大而增加。当座面倾角过大会降低就座者身体的稳定性,增加使用者向前滑动的可能性。合理的座面倾角可以减少使用者背部和腿部肌肉的拉伸程度,并使座面压力分布更均匀。经由查询相关资料得知座面角度为15°~20°时,人体颈部、肩部、腰部和小腿的舒适度较高,跪式坐姿舒适度较高。当座椅未使用膝枕学习状态时,椅面一般后倾3°左右为宜。当座椅供休息时,椅面一般后倾5°~15°左右。为满足座椅使用者的不同需求和使用的安全性,椅面倾角设置为30°~45°。
2.5 靠背
靠背的主要功能是给人体后背支撑,从而降低脊柱尤其是腰椎部的受压程度,同时能使脊柱保持自然的弯姿,产生轻松省力的作用。
2.6 靠背尺寸
高靠背是指高度达到肩部的靠背,高靠背具有支撑腰椎部和胸椎下半部,其上下高度取400 mm。坐姿比较省力,适用面较广。高靠背加上头枕就成了全靠背,可以用于休息使用。
2.7 靠背角
靠背角指靠背与椅面的角度。靠背角的大小对坐姿和脊柱、背肌的负荷程度有重要影响。当使用者未使用座椅膝枕采用正常坐姿时,座椅可根据儿童的坐姿需求调整前后倾斜角度。如“伏案”时椅板可调节前倾6°~7°,“正座”时椅板可调节后斜6°~7°,可使人无论伏案还是正座,均能实现躯体的4个90°令脊推接近生理角度,让人挺胸、直腰、抬头,保持理想的读写视距,预防儿童近视和驼背。人体卧姿时靠背的角度在103°~115°,较好地防止人体向前滑动和引导腰部依靠在靠背上,设置靠背角最大调节角度为135°,结合图3的卧姿受力分析,保障椅子使用的稳定性。
2.8 靠背形状
在站立时,人的脊椎相对直一些,向前凸,坐下时人的脊椎后凸。实验表明(纳切森测得),在站、坐两种姿势下,人的第三根腰椎和第四根腰椎之间的压力,以站立时压力为100%,则直着坐时,压力为140%,弯着身子坐下时压力为190%,增加了近一倍。所以靠背要设计成与脊柱的自然弯曲状相适应的形状。脊柱腰椎段是承受上体重量的关键部位,应呈较大的前凸弯曲形状。靠背应在腰椎依靠部位适度隆起,即靠背形状呈S形使人后靠在靠背上与腰椎段自然弯曲贴合,并使上体前倾,避免腰椎段后凸,使就座者尽可能的保持健康坐姿。
2.9 扶手
扶手高度以坐者上臂下垂时的肘部高度或略低于肘部高度。因为使用者的身高体型波动较大,所以扶手采用可调节高度和角度设计,高度距椅面20 cm时可调高度,宽度设置为10 cm。
2.10 头枕
头枕采用可拆卸设计,方便换洗和喜好选择。头枕根据颈椎弧度,设计30°弧形,保护颈椎,轻松休息。
2.11 膝枕
膝枕的较为舒适支撑腿部角度调节范围在20°~40°,通过角度调节来支撑人体腿部不同部位,使人体重力分布更均匀,以倾斜的座面和膝枕配合的跪姿方式使人体的脊椎处于最接近于自然直立状态的理想姿势,从而减轻了人体的坐姿疲劳。膝枕的伸缩性使其满足不同形体就座者的使用并且方便收放,不妨碍座椅其他坐姿的使用。
2.12 脚踏
椅子设置高低在50~100 mm可调节的脚踏,满足不同身高的就座者,不同高度搭配的桌面使用需求,使就座者的大腿处于近似水平的舒适位置,并且还可使腰部、臀部和腿部经常得到活动,增加血液循环,减免座椅长期使用者下肢静脉曲张和痔疮的产生。
2.13 脚轮
脚轮直径为50 mm,宽度为38 mm,采用重力自锁设计,利用弹簧、阻力片,使儿童在坐下的时候,弹簧发生形变,阻力片与脚轮接触,抱死防止脚轮移动,当儿童站起时弹簧恢复原状,阻力片与脚轮分离,恢复滚动。座椅承重20 kg以上锁轮自动锁定,保障儿童安全,学习更加专注;无人坐时,椅子可以轻松旋转。
2.14 颜色
因儿童注意力易分散的特点,学习椅在颜色的设计上不能选用过多的色彩,采用同色调配色或单纯色,避免颜色花哨。简易受力分析如图2所示,人正常作业时重心如图3所示,因为椅面前倾6°~7°,人的重心略向前移,人的部分重量由大腿和背部(若能靠背时)分担,作业坐姿的平均压力比未使用坐姿矫正椅的压力小。采用跪式正常作业坐姿时重心如图4所示,跪式坐姿椅面前倾15°~20°为宜,重心又前移,膝枕的设计使人体部分重量由小腿合理分担,臀部及大腿部平均受压均比正常作业坐姿小。当人采用跪式不正确作业坐姿时,人惯性地驼背前倾导致人体重心下移,腿部支撑角度变小,如图5所示,当腿部支撑角度小于15°时,腿部支撑不能合理有效的提供支撑,最终导致人体的臀部和大腿受压均增大。此时,座椅上的压力传感器发出警报,提醒儿童和家长,儿童坐姿不正确应及时调整正确坐姿,达到矫正坐姿的功能。
3 总结
通过对座椅的力学分析,智能儿童椅设计了S-KTG同步结构,达到靠背与坐垫同时根据儿童休息需求移动;H型防翻底座保证儿童休息时座椅不会后倾翻倒;自锁式座椅轮通过简单的刹车机构使座椅不受力时可自由移动,儿童坐下后椅轮抱死无法移动;可调高座椅满足了一定年龄段的儿童在与桌面相对舒适的高度学习。
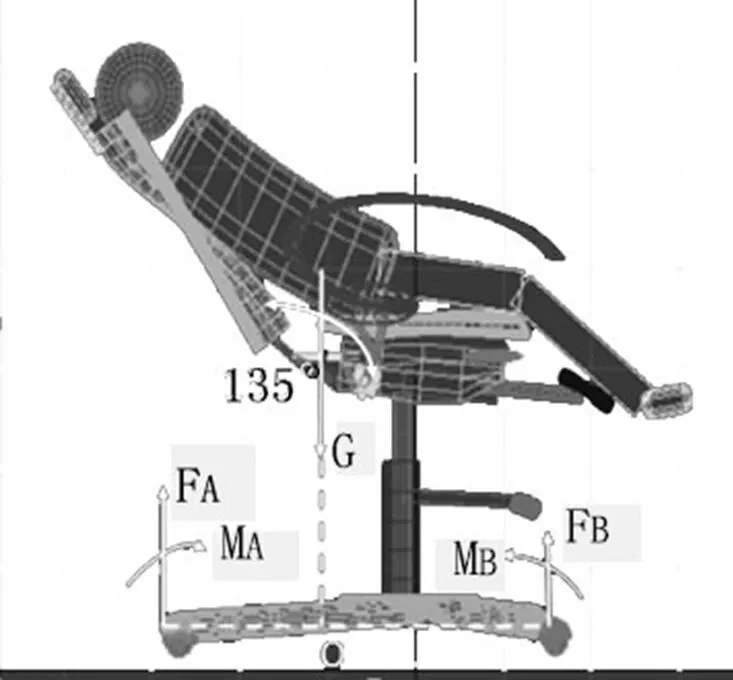
图2 卧姿时的受力分析

图3 正常作业坐姿
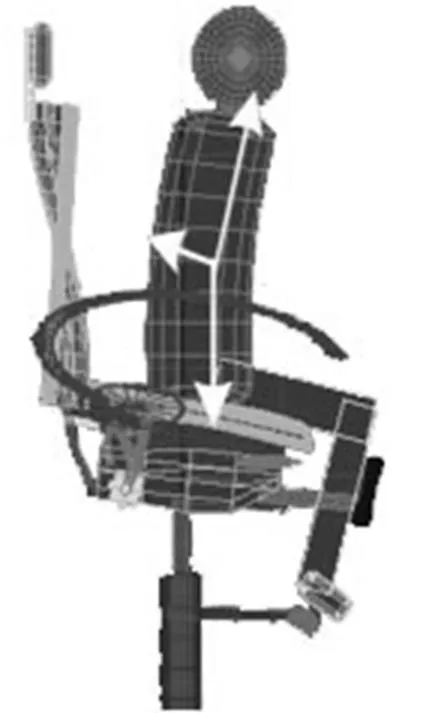
图4 跪式正常作业坐姿

图5 跪式不正确作业坐姿
整个智能儿童座椅使用了坚固、环保、健康的绿色材料,使座椅满足儿童端正坐姿的要求下,同时有益于儿童的健康。每天的学习及坐姿时间数据可视化更提高了儿童学习的积极性。满足了市场和家长儿童需求的同时,迎合了当下家具用品大数据化、智能化的趋势。
[1]沈维蕾.基于人因工程学的座椅设计与评价[J].机械工程师,2005(10):68-69.
[2]马国忠,张学尽.汽车驾驶用座椅的抗疲劳人机工程设计[J].人类工效学,2004(3).
[3]陆剑雄,张福昌,申利民.坐姿与座椅设计的人机工程学探讨[J].人类工效学,2005(4).
[4]陈峰,徐琴.座椅的人因工程分析[J].科技信息(学术研究),2007(29):15.
[5]曹志伟,李娟.轨道车辆座椅舒适度评价方法及研究展望[J].包装工程,2017(2):21-25.
[6]唐国强. 汽车座椅骨架结构的拓扑优化分析[J].时代汽车,2018(1):113-114.
[7]刘力卓,方兴祥,赵义格.和谐号动车座椅的人因学改善研究[J].工业工程,2016,19(5):16-23.
[8]祝琳,王婷.人因工程在校车内设施环境中的应用[J].技术与创新管理,2018(5):9.
[9]李文菁,赵宇,王丽.人因工程学在人体骨肌系统研究中的应用[J].骨科临床与研究杂志,2018,3(1): 48-51.
[10]王军,邓明明,高贺云,等.家用老人智能药箱的无障碍人因设计[J].包装工程,2015,36(2):76-78.
[11]吴欣洁,张芳绮.儿童专用计算机桌椅的人因工程评估——以计算机仿真为基础[J].人因工程学刊,2011,13(1):41-51.
曹学晨(1997—),江苏南京人,工业工程专业。
闫龙(1980—),山东泰安人,博士,副教授,研究方向为机器视觉、人工智能。
山东省教育厅高等学校科技计划(编号:J17KA068),国家级大学生创新创业计划项目
2095-6835(2019)03-0021-04
U463.836
A
10.15913/j.cnki.kjycx.2019.03.021
〔编辑:严丽琴〕
猜你喜欢
康复(2022年25期)2022-10-05
中学生学习报(2022年26期)2022-05-23
建材发展导向(2022年6期)2022-04-18
汽车工程师(2021年3期)2021-04-16
汽车工程(2021年12期)2021-03-08
小天使·一年级语数英综合(2020年9期)2020-12-16
领导文萃(2019年18期)2019-09-25
发明与创新·小学生(2019年9期)2019-09-12
汽车与安全(2018年1期)2018-05-14
