
基于LabVIEW的无人机飞行状态监测系统的设计
2019-03-06 08:24曹雍川苏雨澈
自动化与仪表 2019年2期
谢 檬,曹雍川,苏雨澈
(1.西安交通大学 城市学院,西安710018;2.国家电网汉中供电公司,汉中723000)
在人类航空史上, 多旋翼无人机从诞生到应用,经历了很长的过程[1-3]。 与其它无人机对比,四旋翼无人机具有结构简练、占地小、质量轻、控制灵动便利、可垂直升降、可悬停在空中等优点,无论在军事范围还是在民用范围都得到了普遍的应用[4-8]。 目前,四旋翼飞行器主要由飞控手目视操控飞行过程,其平均航迹偏差高达5.2 m,平均高度偏差为0.9 m,滚转角和俯仰角的波动幅度小于8°,传感器的温度降低了2 ℃。 为了解决飞控手目视检查造成的人为误差[9-11],所设计的基于LabVIEW 的无人机地面控制系统,可以实现无人机飞行状态信息的自动采集和性能评估。 无人机的飞行状态信息包括三轴姿态角、三轴角速度和三轴加速度。 通过LabVIEW 平台的监测系统实时显示、控制、评估和记录无人机飞行状态信息。
1 总体方案设计
根据四旋翼飞行器的工作原理及特点,先对以下检测信号进行数据采集:x,y,z 轴的角速度;x,y,z轴的加速度;仰角,滚动角,航偏角。 然后将这些信号传输到LabVIEW 中, 去设计仿真飞行器飞行状态的监测系统。 整个系统包括硬件和软件两大部分。 硬件主要是测试对象的传感器,采集卡,计算机等;软件采用LabVIEW 图形化语言编程。 其控制系统结构如图1 所示。

图1 地面控制系统结构框图Fig.1 Structure block diagram of the ground control system
2 软件设计
监测系统的软件设计采用图形化编程软件平台LabVIEW[12-15],主要实现以下功能:①飞行姿态各项参数的实时测量及显示;②超出预设飞行范围时进行报警,地面控制台重新发送控制命令;③数据回放 便于查阅飞行时在不同时期的历史记录,为故障检测提供平台;④数据采集 将监测信号读取到上位机,进行显示及数据处理。
2.1 软件功能
系统软件采集相关参数,通过设置数据采集间隔和上限报警值来判断飞行航线是否在规定的范围。若在规定范围内则继续对数据进行采集并记录结果;若不是,则显示报警并重新发送控制命令,飞行重新开始。 地面控制系统的数据采集流程如图2 所示。
由图可见,首先设定数据采集间隔和上限报警值,然后采集各项飞行数据并实时显示,判断高度值、速度值是否超出设定范围。 如果超出设定的范围就会显示报警提示,并重新发送控制命令,飞行重新开始;如果没有超出设定的范围则继续进行数据采集并实时显示等。
2.2 控制系统前面板设计
控制系统前面板包括采集设定界面和数据查询2 个子界面,如图3 所示。 采集设定界面包括实时显示表盘、实时显示曲线、上限值设定及报警系统、截止频率和记录间隔设置、开始记录及停止按钮。

图3 控制系统前面板Fig.3 Front panel of control system
图中,实时高度是对无人机在起飞、航行、降落期间高度变化的数据,显示单位m;实时飞行速度为在某一时间点上无人机的具体速度, 显示单km/h;俯仰角为无人机飞行的方向与水平面的夹角,显示单位(°);滚转角为飞机绕机体坐标系纵轴的旋转运动,该系统可测量无人机“左滚”与“右滚”角度,显示单位(°); 截止频率为当保持输入信号的幅度不变,改变频率使输出信号降至最大值的0.707 倍,单位Hz; 采集到的数据将按照所规定的时间间隔记录,单位s。
3 系统测试
3.1 无人机起飞姿态监测模式
点击“开始”按钮,开始采集监测数据并显示至虚拟面板;点击“停止”按钮,数据采集暂停并将所采集的数据以excel 表格形式存储至存储电路。
无人机的起飞姿态监测模式界面如图4 所示。统一规定将频率设为0.125 Hz, 试验数据记录间隔设置为1 s。

图4 起飞姿态监测模式Fig.4 Taking off attitude monitoring mode
由图可见,无人机正处于起飞状态,此时的监测数据见表1。 由于流速越大,压强越小,在飞机起飞时, 飞机机翼下方的流速小于机翼上方的流速。因此,无人机必须加速起飞,此时无人机的俯仰角和滚转角缓慢上升。
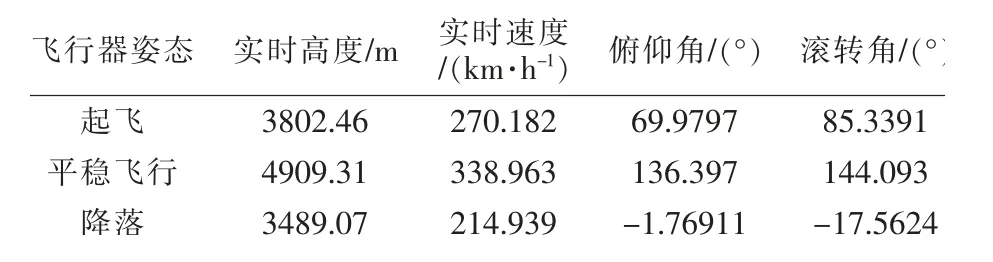
表1 无人机姿态监测模式下的实时数据Tab.1 Real-time data in UAV attitude monitoring mode
3.2 无人机平稳飞行姿态监测模式
无人机的平稳飞行姿态监测模式如图5 所示,实时数据见表1。在平稳飞行状态时,无人机的飞行高度和飞行速度均基本保持不变,前进靠的是发动机的动力带动螺旋桨旋转产生的向前牵引力或是喷气产生的向前推力,其飞行姿态也基本不发生变化。

图5 平稳飞行姿态监测模式Fig.5 Smooth flight attitude monitoring mode
3.3 无人机降落姿态监测模式
无人机的降落姿态监测模式如图6 所示,实时数据见表1。此时,无人机的速度、高度,以及滚转角和俯仰角均处于下降状态,降落是减小发动机的推力,使飞机速度减小,从而减小空气流经机翼的速度,从而减小升力,使飞机下降。

图6 降落姿态监测模式Fig.6 Landing attitude monitoring mode
3.4 数据存储及回放模式
数据存储及回放模式如图7 所示,主要是对系统采集监测得到的实时数据进行存储和查看,并进行统计分析。 在程序主界面上,点击左上角的数据查询按钮,再对数据查询设置查询起始时间以及查询结束时间进行区域规定, 之后点击确定按钮,此时就可以对之前的测试数据进行回放。

图7 数据存储及回放模式Fig.7 Data storage and playback mode
4 结语
所设计的基于LabVIEW 的无人机飞行状态监测系统采用MPU6050 九轴传感器采集角速度、加速度、仰角、滚动角和航偏角,并将信号传入虚拟仪器中,利用LabVIEW 软件搭建虚拟监测系统。 在不同的监测模式下,采集监测信号的数据,实现了数据的显示、处理、报警、数据存储及回放等功能。 通过虚拟平台,对无人机飞行状况进行监测,测试结果证明,计算机结合虚拟平台构建的监测系统可以实时监测无人机飞行状态的各项指标,不仅可以进行故障分析,而且解决了飞控手目视检查造成的人为误差,提高了无人机控制的性能指标。
猜你喜欢
中学生天地(A版)(2022年10期)2022-11-23
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
少年文艺·我爱写作文(2017年6期)2017-06-12
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2016年3期)2016-02-28
诗选刊(2015年4期)2015-10-26
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
商业评论(2014年9期)2015-02-28
