无人机空三加密像控点的布设分析
2019-03-07 02:08计春祥任成冕
资源信息与工程 2019年1期
曹 扬, 张 禾, 计春祥, 任成冕
(贵州省第二测绘院,贵州 贵阳 550000)
1 无人机概述
低空无人机航空摄影测量技术作为一种新的测绘手段,可针对特定区域制定飞行任务,快速获取高分辨率影像数据,通过外业像控测量、内业空三加密形成数字航空摄影测量成果,利用数字航空摄影测量技术制作DLG、DOM、DEM成果。
无人机获取的影像具有像幅小、基线短、重叠大、飞行姿态不稳定等特点。目前相关规范对低空无人机摄影测量控制点的布设方式及数量并没有明确规定,而像控点的数量及其分布是影响区域网加密精度的一个非常重要的因素,因此在满足内业成图精度的前提下,为减少野外像控点布设数量,寻求适合低空无人机航摄的最佳像控点布设方式及数量是一个迫切需要解决的问题。
本文针对某测区航测成图要求,结合使用的无人机的航飞与相机的参数,根据像控点分布和密度对平差精度的影响,对目前主流的无人机像控布点方案和航飞方案进行对比分析,从而获得最优的方案。
2 实验区情况
本次试验位于贵州省某县,属于山地地区,项目区内高程差400 m以上。为避免航片重叠度对加密精度的影响,此次航飞试验以构架航线方式,加大重叠度进行航飞,共完成四个架次航飞。航飞设计过程中构架航线平均航高比正式航线设计高50 m,在数字摄影测量过程中不使用构架航线航片,只作为空中三角测量过程中的测区加固与精度提高使用。
试验拟定航摄地面分辨率为10 cm,一、三架次为南北分飞行,二、四架次为东西飞行,一、二架次飞行覆盖北侧相同区域,三、四架次飞行覆盖南侧相同区域。每个架次均涉及500多张有效航片,共计无人机航片2 206张,航飞覆盖区域约25 km2。航片像素大小4.62 μ,地面分辨率10 cm。
3 像片控制点实验设计
测区内共布设49个控制点,受地形和植被影响限制,控制点布设不均匀。为确保点位可用及提高作业效率,部分点位均在相邻位置布设了两个以上控制点。
选取不同控制点数量,对加密区域进行平差。测试一,将全部49个控制点全部平差。测试二,尽可能均匀地选取控制点,同一区域有多个控制点时,随机选择其中之一。在地形地貌的影响下,保证控制点尽可能均匀分布。测试三,仅在四角及中心选取控制点。控制点选取情况见图1。
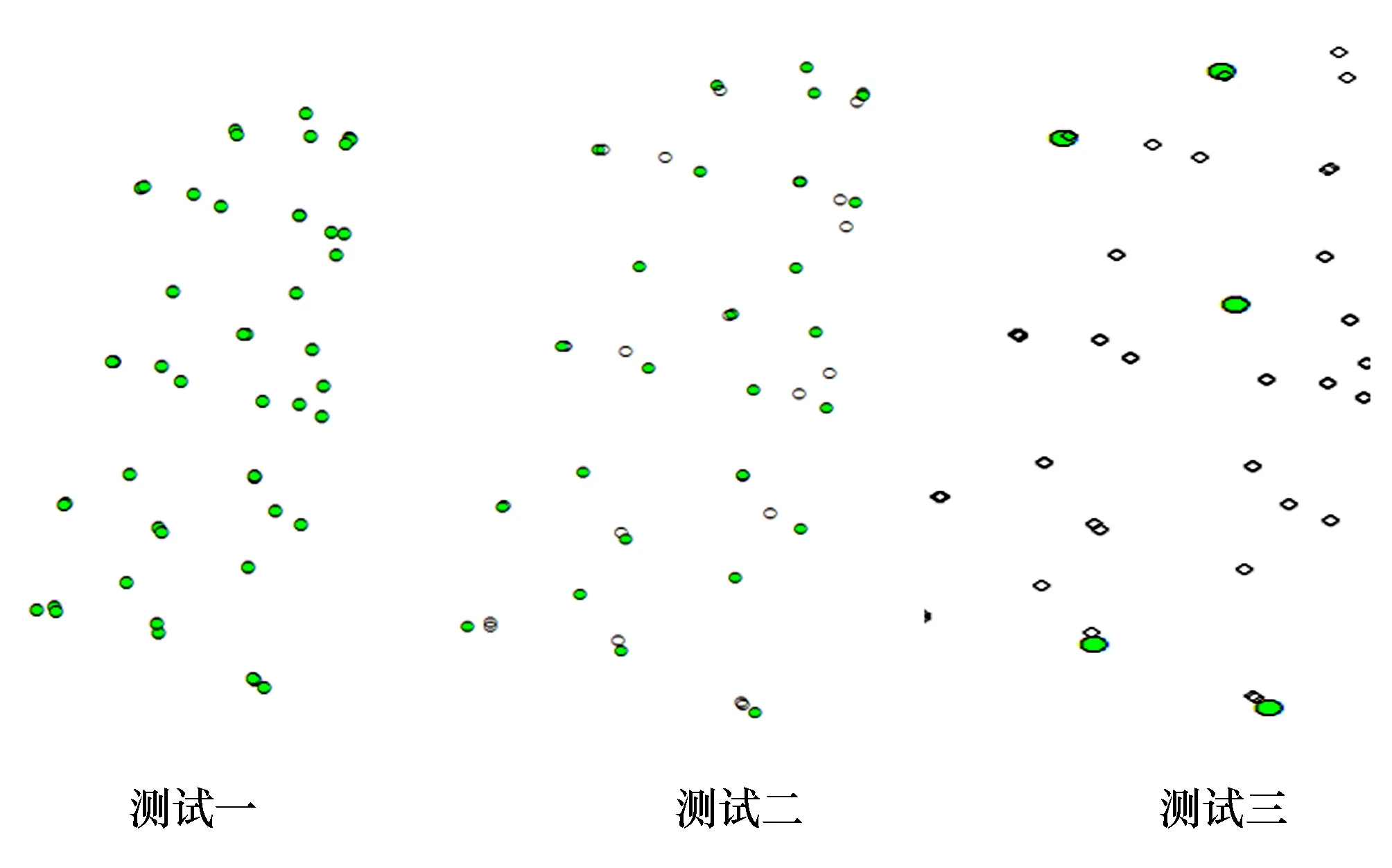
图1 实验区域控制点布设情况图
分别根据测试一、二、三的情况进行空三平差计算,利用多余的控制点和外业实测点作为检查点,分析测试结果得出最优像控点布设方案。
4 实验情况
通过空三加密平差后,不同测试方法控制点点位误差均能控制在10 cm左右,即平差后像片控制点点位误差可控制在1个像素左右,具体误差见表1。
测试一控制点平面中误差为7.888 cm,高程误差为6.908 cm;测试二控制点平面中误差为7.906 cm,高程误差为3.754 cm;测试三控制点平面中误差为7.406 cm,高程误差为5.585 cm。从误差表可以看出:随着控制点减少平面控制点误差增大,高程误差由于约束点的减少反而中误差减少。

表1 控制点点位误差表(cm)

表2 检查点误差表(cm)
控制点误差并不能完全反映加密区域整体精度,同时需要利用检查点误差评价加密精度,针对测试二和测试三,对检查点精度情况进行分析(见表2)。
通过检查点对比,控制点减少后,检查点高程误差增加,测试二检查点高程误差为9.696 cm,而采用四点控制时检查点高程误差达到了60.448 cm,已经无法满足空三加密要求。
采用测试二的控制点布设方案,空三加密成果基本上可以满足要求。所有控制点相对均匀分布,经量测控制点间距普遍在1.2~1.4 km,即最大间隔距离小于1.4 km。
采用测试三的控制点布设方案,平面精度存在一定误差,部分点位平面精度误差接近0.5 m,可满足精度要求不高的DOM制作需求。但是高程精度误差较大,在部分区域检查点误差接近1.5 m。
5 结论
通过对控制点不同分布的空三加密成果进行对比分析,控制点分布间距在1 km至3 km对空三加密成果的平面中误差影响不大,在对高程要求不严格的情况下可适当加大控制点间距。一般大比例尺项目的生产过程中,也可适当减少控制点的数量,按照1.5 km间距布设控制点,可以使空三加密成果达到为±1个像素精度。在实际工程应用中不仅可以根据测区情况及航飞架次情况加强地面控制点布设,也可在航飞过程中采用构架航线的方式来加强空三加密区域的稳定性,提高空三加密区的整体精度。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
计算机系统应用(2022年4期)2022-05-10
资源信息与工程(2021年5期)2022-01-15
铁道勘察(2021年6期)2021-12-27
天津医科大学学报(2021年4期)2021-08-21
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
计算机应用(2017年1期)2017-04-17