
基于动态控制的双足移动机器人自平衡研究
2019-03-15 13:31王治平黎斌张轩龙
电脑知识与技术 2019年2期
王治平 黎斌 张轩龙
摘要:当下,移动机器人的运用愈来愈为广泛,由最初再现式机器人发展至自主型机器人,再进入到当前智能机器人,几乎每个领域都能够发现它的存在,对于它的研究也愈来愈受到学术界所关注。本论文简要诠释动态控制理论,阐述自平衡机器人工作原理,分析自平衡的实现及其系统模型的建构。在此基础上,展开动态控制下双足移动机器人自平衡的设计与制作,包括电机方案、机器人身体和附件、电源方案、芯片运作方案以及机器人动态控制的计算方法等内容。
关键词:动态控制;双足移动;机器人;自平衡
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2019)02-0187-02
早在20世纪80年代的后期,机器人的相关技术愈来愈为完善化,其把电子技术、机构学、计算机技术、控制理论、传感器技术以及人工智能化等有关的知识加以整合,同时又有意识地汲取诸如能源科学以及材料其他领域学科最近的研究成果,从而产生了独具特色的机器人学。双足移动机器人属于移动机器人类型中的一种,其具备如下的主要优点:平稳的运作状态、较高的能量的使用率、简易化的结构、突出的适应环境性等。对于这一类机器人的探究愈来愈变成研究移动机器人的一个焦点,可见,无论是有关它的理论方面的价值还是实用性价值都是非常明显的。在最近的几年中,双足移动自平衡式机器人的相关课题研究日益发展,从最初的美国、法国、日本以及瑞士等国家快速地在全球蔓延开来。例如,双足自平衡式机器人的设想源起于日本的专家山藤高桥(1986),他所设计出的是一种新型的智能化站立型机器人。此后,实验原型机纷纷构建起来。同时,就双足移动机器人自平衡研究领域内所暴露的一些问题,针对性地提出了若干解决的对策,且就原型机智能化的平衡性和运动特征展开证实。本论文基于动态控制的相关理论来研究双足移动机器人的自平衡内容。
1 动态控制基本理论概述
动态控制指的是项目在构建与实施时,因为时空发生了主客观的改变原因而展开的对项目进行管理的方法论。因为项目实施时,主客观的条件改变呈现出绝对性,而不变则呈现出相对性。在实施项目时,平衡具有暂时性,而非平衡性则具有永恒性。因而,在实施项目时,须基于改变了的状况来实时地掌控项目的目标及其进度。动态控制的原理主要有:(1)对项目的目标做好动态控制的预备性工作,分解项目所设立的目标(包括质量、投资、进度、成本等),从而界定应用在掌控目标控制规划数值;(2)动态地跟踪与控制项目的具体实施进度。其又包括如下的几要素:①搜集项目对应的目标的现实数值,包括现实的成本、施工的进展以及现实施工的质量等方面;②定期的比对并分析项目的现实值以及计划值,若出现偏差情况,须及时地采纳纠偏的对策及时地调整。就本论文而言,动态控制主要指的是在設计双足移动机器人自平衡时进行实时地控制,若出现设计上的偏差现象时,及时地通过相关的程序加以控制。
2 动态控制下双足移动机器人自平衡模型建构
2.1 自平衡机器人工作原理
双足移动自平衡机器人的工作原理如下:将全部成对式的组件均等地放置于机器人两边,全部单一型的组件叠置于其中心面处,目的在于确保结构的对称性;另外,机器人的质量关键体现于下板与顶端,从容而确保控制的容易性。双足自平衡机器人侧面的结构中,其机器人身体主体部分基于电机的轴心线这个中心往后振动,如果基于机器人的机身和地面垂直向度等于0度,那么机器人身体所能够摇摆的范围在-47°~4°。左右双足依次通过2个直流的伺服电机加以驱动,基于电机的这个轴心且当作中心进行360°的前后转动。若其并没有受到控制,那么,机器人身体无论向前或向后倾斜,左右足均处于静止状态,也即机器人身向前或向后摇摆和双足的转动处于相互独立的状态,从而加大了控制机器人的难度。因而,自平衡控制据此提出的基本理念为:若对倾斜角度进行测试的传感器测试到的机器人出现倾斜现象时,控制体系基于检测所获取倾角出现单个相应的信号,经由电机驱动对应的双足来控制机器人即将倾倒的方向,从而确保机器人处于动态的平衡状态之中。
2.2 自平衡的实现
基于2.1的工作原理可知,当双足移动机器人受到控制时,它的机器人身体状态改变会导致机器人身体出现静止、前倾与后仰等3类运动状态。若受到准确地控制,那么机器人身体即可以维持平衡的状态,从而达到自平衡的实现:1)前倾:即机器人身的重心往前,那么机器人身体也即往前倾斜,驱动的双足向前移动,从而确保机器人的平衡性。2)静止:双足移动机器人身体的重心处在电机的轴心线正上方处,此时即达到动态的平衡静止,无须任何的控制。3)后仰:即机器人身的重心往后,那么,机器人身体也同步往后偏斜,驱动的双足往后移动,从而确保机器人的平衡性。
总之,双足移动机器人自平衡控制的主要实现方式为:在测试倾斜角度对应的传感器测试到机器人身体出现倾斜时,动态控制体系即会基于所检测的倾角出现单个对应的力矩,借助于控制机器人的电机驱动2只脚往人身所要倾倒的方向进行运动,从而确保机器人自平衡的实现。
2.3 自平衡机器人的系统模型
双足移动机器人的自平衡系统模型具有强耦合性、多变量、高阶以及非线性的特征,且处于非稳定的状态之中。如果采纳的是实验式建模法则难度较大,因而弃之不用采用。而至于机理式模型的建构,如果忽视部分次要的因素以及对系统加以精简处理,从而可将其视作简化和理想化假设,简化后的系统可被视为一个具有典型性的动力学函数式,达到理想化的系统模型的建构:(1)就机器人身而言,因为理论研究时仅需分析的是机器人身的质量即可,因而,把安装于机器人身之内与其外的组件,均抽象为整体的一部分,进而将机器人身假定为质量布局均匀的机体,至于摆杆则固定于机器人身体的顶端,和水平面处的细杆保持垂直的状态,因而,机器人身与竖杆能够被进一步看作能够围绕着转轴进行旋转的一个刚性的振动体;(2)把双足看作一个外形与质量布局均匀的圆盘体。
3 动态控制下双足移动机器人自平衡的设计与制作
3.1 电机方案
因为机器人身尺寸的设计、电机的掌控以及驱动方面的设计等都应基于确定了的电机方案这个基础,因而,须先界定好电机方案。当下有关电机的方案主要采纳的是把2个无刷直流电机或的步进的电机单独地安置于机器人身之中的模式。本论文主要分析前者:它是一类断续式运作的同步电机,其受到脉冲信号的控制,并把控制相关的信号转换成阶跃式角位移,也就是每一次传递单个的脉冲,电机即旋转对应的角度。因此,步进电机转轴的转角或者是转速和所施压的脉冲数存在着正比的关系,只需将控制脉冲频率加以改变之后,即能够就达到对其转速加以调控的目的,且可以达到迅速开启、制动以及反转的效果。当其受到小步距角的控制时,能够使其处于低速度而又平稳的运作状态中。步进电机处于平稳运作状态仅和脉冲的频率存在着联系,而与电压以及负载并无联,也不会受到气压、震荡以及外界温度等因素的影响。另外,它在控制方面还有显著的优点,即因为其每次选择一周均有固定且单独的步数,此表明即便偶然发生了步距的误差,亦不会把误差进行积累。因而,它较为适用于开环体系。
3.2 机器人体和附件
机器人身体的核心功能包括:载物箱、传感器、蓄电池以及控制电路板的载体;连接中轴左右不同两只脚;其顶端的平面视为脚踏板。顾及被当作实验性的一种机器人身体的样式类型,也许需常态性地对安置于机身的零组件以及电路加以修改、拆装以及接线等一系列的操控,本论文把机身设计成框架式的构造,其框架的材料第一个条件是具备一定的刚度,可以承载充足的重量,同时也应确保机身的重量尽量地轻。因而,挑选厚度为 5mm规格的角铝当作机身四周的框架素材以及同样厚度的铝条当作不同平面的中间性隔条,从而可以顾及刚度以及机身重量的需求。机身的高度主要决定于机器人双足的垂直高度,因为本论文所选定的双足垂直高度是为420mm,因而它的足心离开足底部的高度h是210mm,机身底端和地面的间距h1为50mm,机身的电机轴安置孔间距机身顶端h2为40mm,据此可推出机身高度的函数式如下所示:
H = (h + h2 ) ? h1 = (210 + 40) ? 50 = 200mm (1)
其中,上述式子(1)中的H所表示的是机身的高度;R表示双足的半径;h1表示机身底端和地面的间距,h2所表示的是机身电机轴的安置孔和机身顶端的间距。
3.3 电源方案
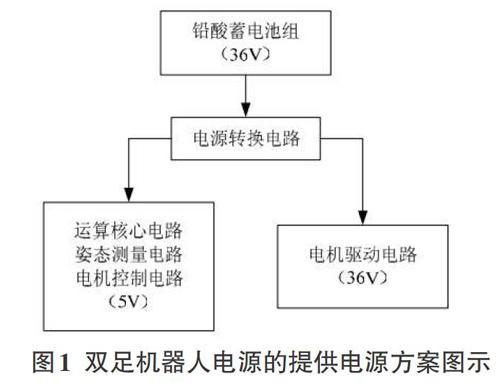
双足移动自平衡机器人所采用的电源方案为铅酸蓄电池。因为本论文所设计的移动机器人自身的重量要比普通的电动型自行车轻,速度一般低于15km/h ,也不会运用在远距离的行驶领域,因而采纳的是36V的供电方案,通过串联3节规格为12V/10Ah的铅酸蓄电池构成电源。控制的部分所采用的是5V的供电电源,因而安置单个电源的提供板块,以依次替控制部分以及电机所提供的5V以及36V的电源,可参见下图1所示:
3.4 芯片运作方案
芯片运作方案所采用的是PIC18F4580加以实施,其和双足移动自平衡机器人的大脑相当,主要负担的职责工作任务为:控制好电机起停环节,往电机的控制板块传递加速或是减速的控制信号,接纳电机传输的Hall信号并展开机器人移动速度的运算,且经由RS-232的串口往PC传送机器人速度的相关信息从而提供储存与研究。就双足自平衡移动机器人而言,PIC18F4580也应用在接纳机身平衡状态的信息,据此展开自平衡的计算。设计时,还把通过PIC18F4580往电机的控制板块传递电机的正反转以及制动的信息。在确定好计算芯片的方案以后,设计并制作PIC单片机的电路板,将其当作系统的计算轴心。
3.5 机器人动态控制的计算方法
机器人动态控制算法是控制的重点。本论文采纳的是查表法来展开计算,即基于二维模糊控制器控制的相关规则,设计出如下条件的语句模式:
If [E=Ai]and [EC=Bj] then [U=Cij]([i=1,2,...,6];[j=1,2,...,6])
(2)
其中,上述式子(2)中的[Ai],[Bj]与[Cij]所表示的是界定于误差[E]、误差的改变率[EC]、以及控制量U对应的论域[X、Y、Z]模糊的子集。
根据36条效应的准则,基于[Ai],[Bj]与[Cij]即推出:
[Rl=Ai×Bj×Cij] ([l=1,2,...,6];[i=1,2,...,6];[j=1,2,...,6])
(3)
将Rl合并之后,即能够获得整体性的模糊关联性式子:
[R=i,jAi×Bj×Cij] (4)
再通过采样获取方位的偏差Ei和偏差的改变率ECj,据此获得输出量,推出相应参量的控制量Uij的式子为:
[Uij=Ei×ECj×R] (5)
4 結语
本论文简单地阐述了动态控制的相关理论,然后基于该理论对双足移动机器人自平衡展开了相关的研究,阐述自平衡机器人工作原理,自平衡的实现及其系统模型的建构。在构建好相关的模型体系的基础上,展开动态控制下双足移动机器人自平衡的设计与制作。由于该类型的机器人体现出体积较小以及灵活性等优点,从而适用于危险与狭窄的环境中工作,从而具备良好的运用发展前景。
参考文献:
[1] 李磊,叶涛,谭民,等.移动机器人技术研究现状与未来[J].机器人,2002(7).
[2] 黄永志,陈卫东.两轮移动机器人运动控制系统的设计与实现[J].机器人,2004,26(11):40-44.
[3] 徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001,24(3):7-14.
猜你喜欢
房地产导刊(2022年5期)2022-06-01
金桥(2019年10期)2019-08-13
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
中国学术期刊文摘(2016年2期)2016-02-13
