基于车车通信的巡航控制系统
2019-04-07 11:23马小陆许其运贾丰源
汽车工程学报 2019年4期
马小陆,许其运,贾丰源
(1.安徽工业大学 电气信息学院,安徽,马鞍山 243002;2.安徽奇瑞汽车股份有限公司,安徽,芜湖 241000)
全世界每年有大约125 万人死于交通事故[1],中国每年大约有6 万人死于交通事故,在高速公路上,意外死亡率更是高达77%,这就意味着一起交通事故发生,4 人中仅能有1 人生还。人为原因是交通事故高发的一个重要原因,其中89.1%是源于驾驶员的误判[2-3]。
自适应巡航控制系统[4-8](Adaptive Cruise Control,ACC)是一种汽车主动安全技术,能在很大程度上减轻驾驶员的疲劳,从而提高驾驶安全性和道路通行能力。然而传统的ACC 系统多是采用雷达、摄像头等传感器,存在感知距离短、对远距离和超视距的物体无法提前感知的缺点,摄像头也容易受到光照和能见度的影响,且PI[9-10]控制能明显改善系统的稳态性能。因此,本文提出了基于车车通信技术[11]的PI 控制算法车辆巡航控制系统。随着车车通信技术的发展,实现了行驶过程中自车与周围车辆之间的信息交互,进而提升行车安全性,降低交通事故的发生,提高道路利用率。
目前,国内外很多学者和汽车厂商都做了大量研究和试验,旨在提升驾驶安全性,提高道路通行能力。丰田推出了协作型驾驶辅助系统,实现车车、车路通信,结合自主安全驾驶辅助系统,实现巡航功能,还研发出利用车辆间通信的“通信应用型自适应巡航系统”[12]。福特金牛座安装了全新的车道摄像头以及ACC 雷达,在高速公路上配合车道保持系统和ACC 自适应巡航,基本实现了半自动驾驶[13]。LIU Bing 等[14-15]、MILANÉS 等[16]在无线通信基础上研究了协同式自适应巡航控制(Cooperative Adaptive Cruise Control,CACC),旨在充分利用道路容量,在有限的交通信号周期内让更多的车通过交叉路口,增加吞吐量。DESJARDINS 等[17]不仅回顾了CACC 系统的3 个重要方面,还讨论了现存的问题。NOEIA 等[18]针对协作型自适应巡航控制系统中V2X 通信易受网络安全攻击的特性,提出了一个决策支持系统,模拟了一个CACC 系统双目标PID 控制器(比例-积分-微分控制器)和模糊检测器。HAN 等[19]提出一种纵向跟踪控制CACC 系统,通过加入众多模拟条件来表明系统的可靠性。SCHAKEL 等[20]研究了CACC 系统对交通流量稳定性的影响。王灿等[21]改进了汽车协同式自适应巡航控制系统的车头时距策略,在原来的基础上获取加速度信息,综合考虑前车的速度变化趋势,提高了策略的前瞻性和抗干扰能力。
针对传统巡航控制系统的缺点,现有研究和相关理论大都是建立在模型的基础上,没有进行实际测试论证。本研究提出并实车验证了基于车车通信技术的车辆巡航控制系统,车车通信技术实现了自车与周围车辆的信息交互,在视距范围外或光线差的情况下也能建立稳定可靠的链接,因而能有效克服传统巡航系统的缺点,保证行车效率,同时能在很大程度上减轻驾驶员的疲劳。
1 系统结构设计
基于车车通信技术的智能车巡航控制系统总体系统结构框图如图1 所示,整个系统分为输入部分、智能车车载单元部分和输出部分。输入部分分为整车线束、北斗定位设备和外部设备信息;智能车车载单元包括车载传感器、信息获取模块、数据处理模块和决策模块;输出部分分为车载执行机构、人机交互界面和其它外部设备。整车线束通过CAN 总线上传车辆状态信息,如车辆的转弯信息到车载传感器的获取模块,同时实时接收U-blox 定位模块得到的高精度定位数据。外部设备信息分为路侧设备和他车车载设备,其中路侧设备主要通过专用短程通信技术(Dedicated Short Range Communications,DSRC)向外广播,如交叉路口信号灯信息、路侧施工情况、隧道提醒等信息,他车车载设备主要通过DSRC 技术向外广播他车的基本安全消息(Basic Safety Message,BSM),包括他车的高精度定位信息、他车的航向角、他车的行驶速度等信息。智能车车载单元接收车载传感器、外部设备上传的数据信息和智能车设备获取的智能车BSM 消息,送到数据处理模块,结合车间间距控制算法得出油门开度或制动力度输出结果,发送给决策模块。输出结果通过CAN 线传给智能车车载执行机构,执行相应的增减油门或制动操作,控制智能车与前车保持在给定的阈值车距行驶,过程中可将获取的数据和计算的结果通过Wi-Fi 上传至人机交互界面动态显示,此外,智能车的状态信息和BSM 消息也会通过DSRC 无线通信发送给周围外部设备。
2 策略算法
基于车车通信技术的智能车自动跟车系统策略流程如图2 所示。
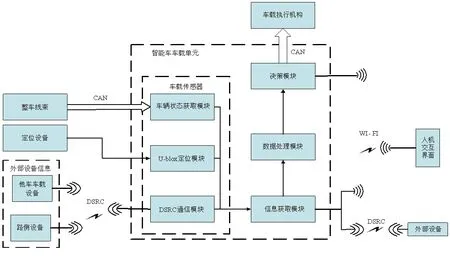
图1 基于车车通信技术的巡航控制系统结构
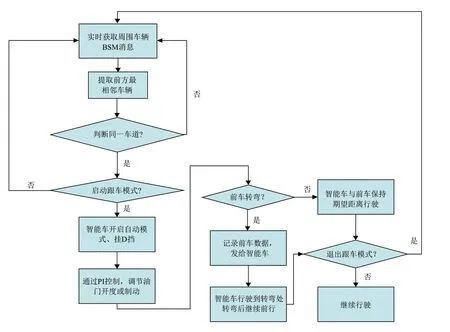
图2 跟车策略流程
车辆在道路上正常行驶,实时连续接收周围车辆的BSM 消息,包含了车辆的经纬度、行驶方向和速度等信息。根据智能车的行驶方向提取前方车辆,即行驶方向一样,距离最近车辆的信息,根据两车的经纬度和方向角信息计算两车的横向距离,判断是否在同一车道,如果不是,继续接收周围车辆的消息,如果是,判断是否启动跟车模式。如果不启动,则继续接收周围车辆的消息,如果启动,则以智能车和前车的期望距离为输入量,结合PI 控制算法,被控对象为智能车的油门控制请求和目标主缸压力,经过CAN 线发给智能车,控制智能车的加速、减速和制动,输出值为两车的实际距离。
智能车在跟车过程中,前车如转弯,会将开始转弯的经纬度信息和转弯过程的方向盘转角角度和时间发送给智能车,智能车触发事件成功,计算当前位置与发送过来的经纬度之间的距离,小于设定的阈值表示行驶到该点,再根据前车的方向盘转角角度和时间信息,智能车跟随完成转弯动作。过程中判断是否退出跟车模式,若否,继续行驶,若是,返回到第一步实时获取周围车辆BSM 消息部分。
PI 控制算法控制智能车的油门开度和制动的流程如图3 所示。
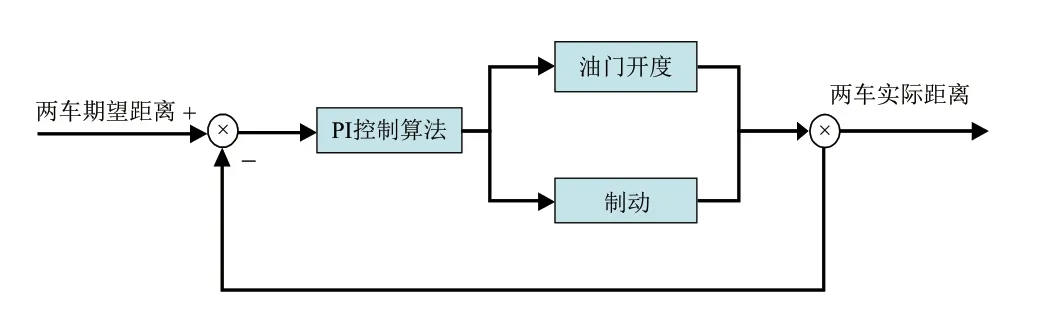
图3 PI 控制算法
如图3 所示,两车的期望距离作为输入量,控制器是PI 控制算法,被控对象是智能车的油门开度和制动,输出量是实际两车的距离,也作为反馈信号,其与两车的期望距离相减的差值作为PI 控制算法的输入。在PID 控制系统中,比例调节P 反应速度快,成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差,其动态性能好。积分调节I 主要用于消除静差,提高系统的无差度。因此,本文引出了具有闭环控制的PI 控制器,特点是能改善系统的稳态性能。
3 仿真验证
3.1 Carsim/Simulink 仿真试验设计
针对跟车策略算法,本节设计基于Carsim/Simulink[22]的仿真试验验证该策略算法的可行性和稳定性。
Carsim 是一款专门用于车辆的动力学仿真软件,主要用来仿真汽车整车的操作稳定性和动力性等,也广泛应用于汽车控制系统的仿真。Simulink是广泛用来建模、仿真和分析动态多维数据的工具,有丰富的可扩充的功能模块库。
本文提出的系统中,前车与智能车的距离是根据高精度定位得到的经纬度计算得出,因此,在智能车上安装雷达传感器直接测距的传统方法不可取。本次仿真先设计了一条长600 m 的双向单车道道路,智能车和前车的输出包括在道路中的位置及车速,前车以固定油门开度比例0.1 行驶,稳定后车速为20 km/h,智能车起始速度为0 km/h,开始时两车在起点同一位置处。
系统输入是前车与智能车的距离,PI 控制算法经过参数整定方法确定比例系数kp为9.7,积分系数ki为0.01,系统输出为油门开度、目标主缸压力,控制车辆加减速与制动。
Simulink 仿真模型如图4 所示,PI 控制算法仿真模型如图5 所示。
本文基于Carsim 和Simulink 仿真得出智能车跟随前车巡航的仿真示意图如图6 所示。
3.2 仿真结果分析
PID 控制系统中,超调量和调节时间是控制系统动态性能的重要指标。超调量的计算公式如式(1)所示。

式中:Y(Tm)代表峰值;Y(∞)代表稳态值。

图4 Simulink 仿真模型
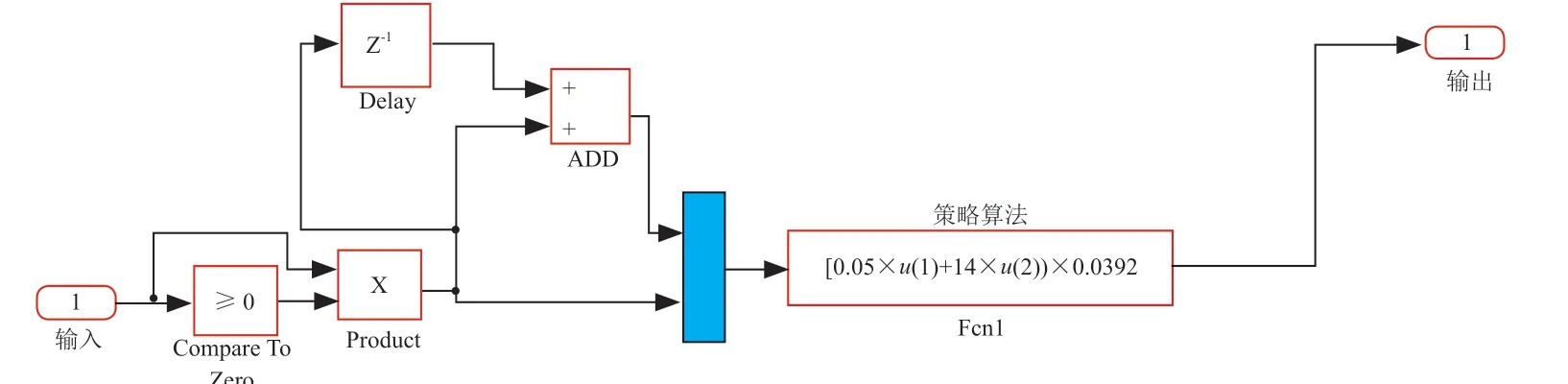
图5 PI 控制算法仿真模型

图6 仿真示意图
超调量是被控变量动态偏离期望值的最大程度,反映了系统动态性能的平稳性,超调量越大,系统偏离生产规定的状态越远。PID 控制系统调节时间指的是响应曲线达到接近稳态值的±5%(或者±2%)之内所需的时间。
输出为前车和智能车的距离,两车仿真距离变化响应曲线如图7 所示。
从两车距离变化响应曲线图中得出Y(Tm)的值为19.06,Y(∞)的值为15.93,由式(1)计算得出超调量为19.65%,由调节时间的定义得出调节时间为14 s。
由图7 可知,智能车和前车的距离经过一段时间的调节后,最终达到稳定状态,稳态距离为15.93 m,与初始设定两车间距15 m 基本一致。超调量的值为19.648 5%,调节时间的值为14 s。由PID 控制系统的一般参数调整范围结合最后的实车测试,结果表明指标符合实际控制要求,验证了本算法的可行性与稳定性。
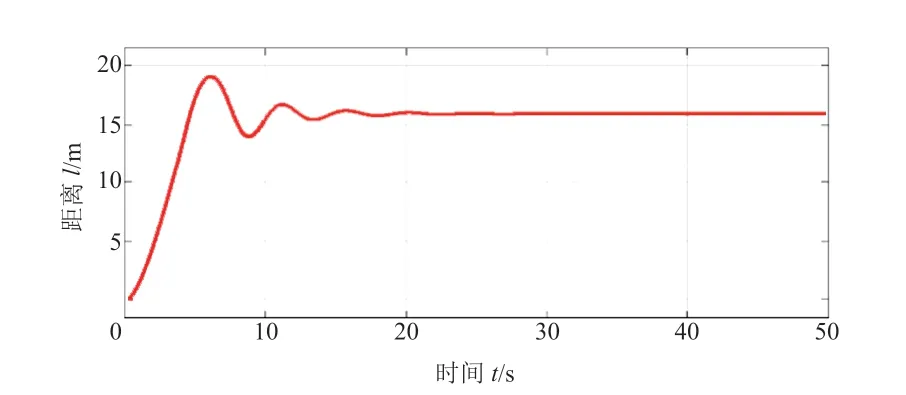
图7 两车仿真距离变化响应曲线
4 车车通信的自适应巡航系统开发
4.1 硬件选型
本文设计的自适应巡航控制系统,是基于金溢科技公司的WB-L20B 嵌入式平台开发的,该设备是采用5.8 ~5.9 GHz DSRC 技术的车路协同专用设备,有4 个核芯且主频为1.2 GHz 的主处理器,满负荷的功耗为6 ~7 W,具有低于10 ms 的DSRC端到端传输延迟,DSRC 传输距离在无遮挡的情况下可达800 m,通信带宽为10 MHz。该设备实物如图8 所示。

图8 WB-L20B 实物
系统的高精度定位数据是由U-blox 公司的汽车级定位芯片MAX-M8Q-01A 定位模块获取,其利用并行接收多达3个GNSS系统(GPS/GaliLo和北斗),获得更可靠和准确的定位数据。工作的温度范围在-40 ℃~+105 ℃,实测结果显示定位的精度为1 m,频率为10 Hz。该定位模块实物如图9 所示。
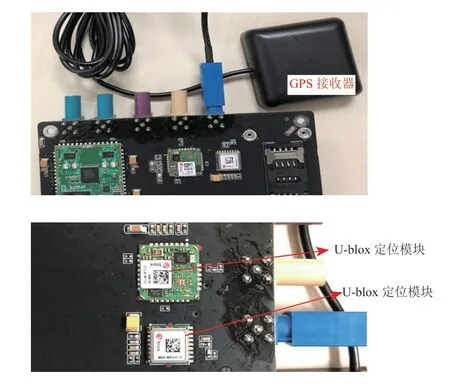
图9 U-blox 定位模块实物
4.2 软件设计
整个系统信息的传递包括外部车载设备向智能车传递的消息、智能车通过车载传感器获取的智能车消息以及决策模块发送给执行机构的消息等。
外部车载设备通过DSRC 通信模块向智能车车载单元传递的BSM 消息中的部分消息包括:纬度,(°);经度,(°);速度,m/s;航向角,(°);车辆宽度,cm;车辆长度,cm;本地标志(Host Flag)。
外部车载设备传递的消息结构体中,经纬度信息由北斗高精度定位模块获取得到,单位是(°);速度是从定位数据中解析出来的车辆行驶速度,单位是m/s;航向角是从定位数据中解析出来的车辆行驶方向与正北方向的夹角,单位是(°);车辆宽度是写在配置文件里,记录车辆的宽度信息,单位是cm;车辆长度是写在配置文件里,记录车辆的长度信息,单位是cm;本地标志描述的是车辆类型,值为0 代表无效,值为1 代表智能车,值为2 代表远车。
智能车车载设备获取的信息与外部车载设备获取的信息大体上一致,包括北斗高精度定位模块获取的经纬度信息、车辆的速度、航向角和本地标志等信息。
决策模块通过CAN 总线发送给智能车执行机构的消息包括:油门控制请求,%;目标主缸压力,MPa。
决策模块发送的消息中,油门控制请求指的是发送至执行机构控制智能车行驶的油门开度值,大小在0 ~99.99%之间;目标主缸压力指的是发送至执行机构控制智能车制动的压力值,大小在0 ~25.5 MPa 之间,实际为了保证测试舒适性,目标主缸压力的值设为3 MPa。
5 测试结果分析
试验设计:一辆装有金溢WB-L20B 通信设备的前方车辆,简称前车,一辆装有金溢WB-L20B通信设备的智能车,简称智能车,在安徽省芜湖市千岛湖路附近一无人路段完成多次试验,该路段的卫星图如图10 中红线和黄线所标注,其为双向四车道,全长2.5 km,线型包括直线和弯道路段。其中直线如图10 中黄色实线所示,弯道路段如图10中红色虚线所示。

图10 测试路段卫星图
两车的行驶示意图如图11 所示,A 车代表被控的智能车,B 车代表前车,d为两车之间的距离。试验选择的A 车是经过改装的EQ 电动智能车,整备质量为1 128 kg,前轮驱动模式,改装后可通过整车CAN 线发送指令给智能车,从而可以实现智能车加减速及制动控制等功能。选取前轮驱动模式、质量为1 265 kg 的某车型作为B 车。
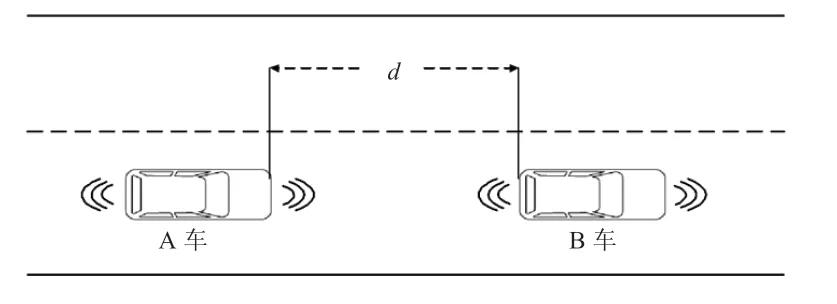
图11 两车行驶示意图
在城市道路中,驾驶员常常采用3、4 挡,对应车速为30 ~40 km/h。因此,试验过程中A 车选取30 km/h 的车速,发给智能车的油门控制请求的量化值设定阈值在0x0 到0x32 之间;从测试过程的舒适性角度出发,制动力度的量化值设为0x1E;从测试安全角度出发,两车间距设为20 m。
现场测试图如图12 所示。

图12 现场测试图
两车实际车距测试结果如图13 所示,其中,横坐标为分:秒格式的时间数据,时间跨度为34:00.7 ~34:38.5,纵坐标是两车的实际距离。
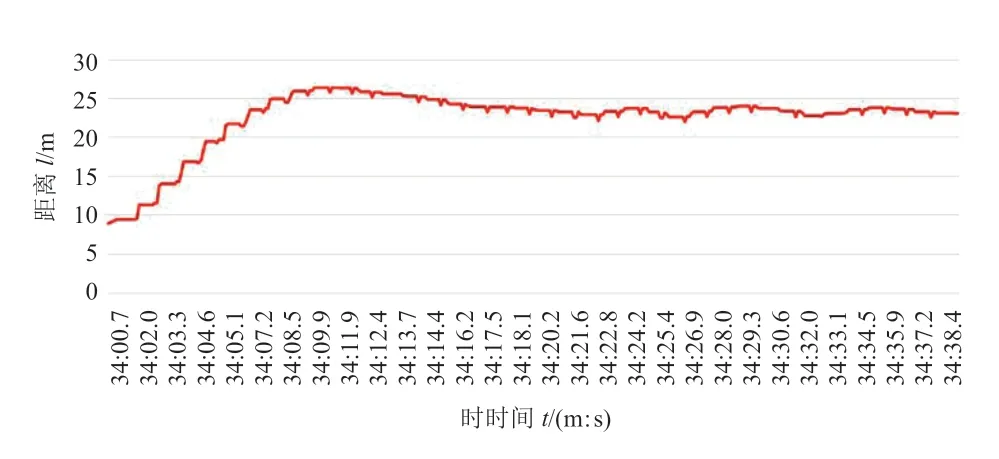
图13 两车距离
PI 控制算法得出的输出到车载CAN 总线的值如图14 所示。
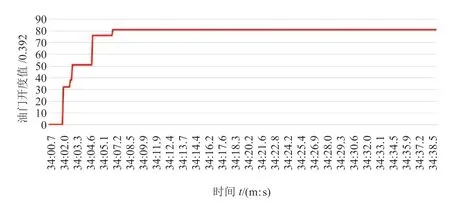
图14 输出到车载CAN 总线的值
测试时,A 车经匀加速过程后的车速稳定值在27 km/h 左右,由图13 和图14 得出:两车距离的峰值为26.4 m,稳态值为23 m,超调量为14.8%,调节时间21 s。
经过多次路上的实车试验,结果表明,系统能稳定地运行,智能车能有效快速地跟随前车行驶,且有很好的平滑性,保证了行车过程中乘员的舒适性。前车与智能车距离达到稳态后,前车选择匀加速、匀减速或制动,智能车也能快速反应,及时作出调整,保持两车车距在期望距离上下小范围波动,验证了本文提出的基于PI 控制的车间恒距策略算法的有效性。
6 结论
(1)针对传统ACC 系统传感器的缺点,提出了基于车车通信的智能车巡航控制系统设计方案,经多次实车测试,系统能稳定运行,智能车能有效快速地跟随前车行驶,验证了该系统的有效性。
(2)本文提出了基于车间恒距策略的PI 控制算法,搭建了Carsim/Simulink 联合仿真平台,并对算法进行了仿真,超调量为19.65%,调节时间为14 s,验证了算法的可行性与稳定性。
(3)仿真和试验结果表明,该系统为汽车的巡航控制提供了有效的新方法,无线通信方式不受视距和光线的影响,能有效克服传统巡航系统的缺点。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2022年10期)2022-06-09
汽车维修技师(2019年7期)2020-01-16
中国测试(2018年9期)2018-05-14
现代兵器(2017年4期)2017-06-02
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14
棋艺(2000年18期)2000-06-14