
大尺寸位移测量分析系统标定方法研究
2019-04-09 05:57王晓鑫郭永波高战朋
工程与试验 2019年1期
王晓鑫,郭永波,高战朋
(中国飞机强度研究所 全尺寸飞机结构静力/疲劳实验室,陕西 西安 710065)
1 引 言
大尺寸位移测量分析系统(即摄像位移测量系统),是通过专用的测量摄像机,在不同位置和方向获取被测工件的两幅或者多幅数字图像,经图像预处理、标志识别、图像匹配、空间三角交会及光束法平差后得到待测点的三维坐标的位移测量系统[1-2]。根据国军标GJB 67.9A-2008中“3.1.9 试验测量仪器”要求:测试仪器应按规定进行校准/检定,并在有效期内使用[3]。对于新研制的非标测量设备,首次使用前,需要进行实验室精度校验,并在使用现场进行自校验。
目前,国内外还没有标准的大尺寸位移测量分析系统标定方法。这是由于在系统中,摄像机参数、基准尺、摄像机间距(摄影基线)、测量基站与被测物体距离(摄影距离)等因素都将影响摄影位移测量的精度,目前还没有一个标准的检定方法可以将各种误差影响因子进行整合[4-5]。因此,本文对大尺寸位移测量分析系统的标定方法进行了研究,针对在设备研制、验收及使用过程中[6],如何有效地对大尺寸位移测量分析系统进行标定的问题,提出了一种标定方法。
2 大尺寸位移测量分析系统组成
大尺寸位移测量分析系统包括图像采集仪(摄像机)、图像采集控制器、基准尺、靶标等,工作时通过图像采集仪对测量对象进行摄影,再通过采集处理图像、计算分析测量结果从而获得被测对象的三维坐标值。目前,该系统是由8台摄像机组成的三维光学图像测量系统,其基本测量单元是由2台摄像机组成的测量分系统,即整个大尺寸位移测量系统由4套双摄像机测量分系统组合而成。这4套测量分系统既可以单独使用,又可以组合使用,如图1所示。
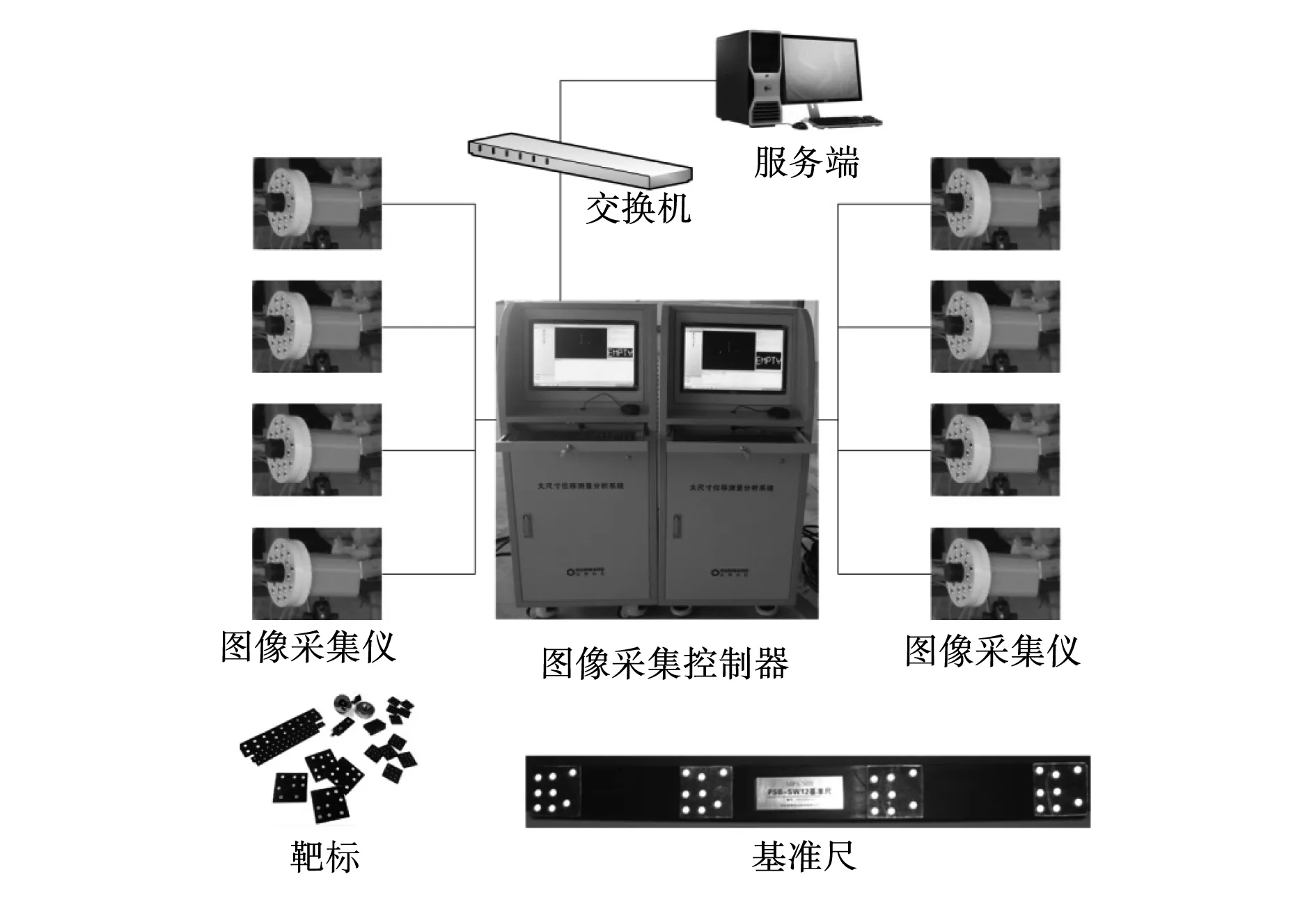
图1 系统组成结构图
3 大尺寸位移测量分析系统标定总体思路
为了解决系统必须标定的问题,确定了系统标定总体思路:
(1)对系统的主要部件(摄像机和基准尺)进行校准;
(2)对产生系统误差的主要因素进行理论分析,得到系统的误差分布;
(3)通过对系统视场空间范围内各典型位置的测量,得到全视场误差分布;
(4)进行实验室计量标定,验证系统误差分布的准确性,确保系统的测量误差总是在系统许可误差之内,从而实现对系统的标定,使其满足飞机强度试验的测量精度要求。
4 大尺寸位移测量分析系统标定方法
4.1 图像采集设备精度
(1)基准尺校准
基准尺是照相位移测量系统基准,基准尺经中国计量院进行校准,校准精度为误差不大于0.01mm。
(2)图像采集仪(相机)参数校准
相机的结构参数和相机与镜头的内部结构有关,在不发生损害的情况下,一般比较稳定。通常一年标定一次(相机内部参数校准的整体误差为0.35μm)。
4.2 系统误差分析
由于大尺寸位移测量分析系统的基本测量单元为由2台摄像机组成的测量分系统,因此整个大尺寸位移测量系统的测量误差可以按照双摄像机摄影测量来进行。双摄像机测量分系统的两个摄像机的摄影方式可以近似为正直摄影,所以可以用正直摄影的公式来推导系统的一个理论精度[7]。双摄像机前方交会示意图如图2所示。

图2 双摄像机前方交会示意图
由图可知,系统的误差与摄影基线B和摄影距离D有关。由于在不同的测量环境,两者都会发生变化,所以系统的误差不是一个固定的值。在使用过程中,测量的三维坐标也不一定都平行于正向和纵深方向。因此,将系统的精度用最大误差的概念来表达,保证系统测量的数据都在最大误差的允许范围内。
本系统中所使用摄像机(Vieworks VH-4MG)的具体参数见表1。

表1 摄像机具体参数
若取系统测量的边界条件,被测对象范围为5m,摄影距离为10m。用最大的误差来表征系统的测量精度,在测量最差的情况下系统的最大绝对误差为1.3mm。
4.3 大尺寸位移测量系统的标定方法
大尺寸位移测量系统的标定,是将标准的坐标量接入被标定系统,系统对视场中相同点的三维坐标进行测量并输出相关的测量结果数据,最终将系统输出的位移数据与标准给出数据比对分析,实现此类系统标定。标定原理方框图如图3所示,主要分为3个部分:标准器单元、大尺寸位移测量分析系统、数据处理输出。标准器单元包含基准尺和光栅尺,经过中国计量院进行校准。大尺寸位移测量系统完成图像的采集、控制和计算。最终将数据进行处理和输出,同时与标准数据进行对比。

图3 大尺寸位移测量系统标定原理方框图
4.3.1 大尺寸位移测量系统标定方法
分别使用大尺寸位移测量系统和经过计量校准的激光跟踪仪(全站仪或其他标准设备及配套仪器),同时测量各靶标的三维坐标,以激光跟踪仪(全站仪或其他标准设备及配套仪器)的测量结果为基准,对比两套系统的测量结果,给出系统误差。
4.3.2 大尺寸位移测量系统标定方法遵循的几项原则
(1)图像采集仪遵循的原则:在系统所有配置的图像采集仪中,第一次每两个进行配对,共分4组,进行校准,确保每个图像采集仪被抽到一次。在第二次抽取过程中,4组图像采集仪中任意抽取第一次抽取时不在同一组的两个图像采集仪进行组合校准。
(2)标定点选取原则:根据摄影测量误差分布原则,在正向偏离摄像机视场中心越远,在径向离摄像机越远,系统的测量误差越大。因此,标定点选取以系统视区最远位置为标定平面,在尽量处于摄像机视场边缘的有效量程范围内,通过径向(前、中、后)、正向(左、中、右)、垂向(下、中、上),选择不少于18个标定点设置靶标(含零点,各方向上6个,需均匀分布)。
4.3.3 数据处理及计算
对比各标定点处两套系统的测量结果,分别求出各点的测量误差,以其中最大值作为图像采集仪的测量误差;以所有抽检图像采集仪中测量误差最大值作为系统测量误差。
(1)计算系统测量误差
对各测量点三维坐标的误差分别进行计算,以采集数据值X为例,计算公式如下:
(1)
其中:
(2)
(3)

按公式分别求出各点的测量误差,以其中最大值作为图像采集仪的测量误差;以所有抽检图像采集仪中测量误差最大值作为系统测量误差。
(2)系统线性度计算
按照端基直线法,沿正向、垂向、径向3个方向通过激光侧距仪给出6个标准线性坐标值,通过以下原理对各方向上的线性度进行计算。计算公式如下:
(4)

按公式分别求出各点的线性度,以其中最大值作为该组图像采集仪的线性度;以所有抽检组图像采集仪线性度最大值作为系统线性度。
(3)零漂的计算
(5)
其中,最大零漂误差为图像采集仪零点每次记录值与第一次记录值之差绝对值的最大值;按公式分别求出各通道的零漂误差,以其中最大值作为系统零漂误差。
4.4 实验室标定方法
由于三维空间标定比较困难,将三维坐标分解为正面方向的平面内变化和纵深方向的变化,分别从正面方向和纵深方向来进行标定。
4.4.1 实验室标定环境
将两个相机摆放到距离标准平台B1的位置,相机之间距离D1。定位相机的相对位置和姿态,使相机连线与滑块移动方向平行,进行正面方向标定。将两个摄像机摆放到距离标准平台末端B2的位置,摄像机间距离D2,定位相机的相对位置和姿态,使相机连线与滑块移动方向垂直,进行纵深方向标定。标定环境见图4。

图4 实验室标定环境图
在测量起始位置对标准设备(WCX-3000位移传感器校准装置,测量精度:≤0.02%FS,最小位移分辨率:0.005 mm)和大尺寸位移测量系统同时清零后,在标准设备测量范围内移动滑块,产生相对位移,对比系统的测量值,计算误差。
4.4.2 标定结果
对大尺寸位移测量分析系统进行实验室标定,标定数据见表2。在标准设备满量程(3m)处最大测量误差为0.98mm,系统精度优于0.05%。

表2 实验室标定数据 单位:mm
4.5 标定方法误差分析
本方法是在正直摄影条件下得到的理论误差分析结果基础上进行系统标定方法研究,对大位移测量系统误差进行评估,影响摄影测量的误差主要由长度误差、形面误差及坐标误差组成,非正直摄影条件下的系统测量误差分布情况是否与正直摄影条件下误差分布一致,需要进一步深入研究。研究表明,在近似正直摄影条件下对摄影测量系统进行对比标定,对待标定摄影测量系统误差进行表征,是客观可行的。
5 总 结
该标定方法在大尺寸位移测量分析系统标定中得到应用,通过进行系统误差分析,确定了影响系统精度的关键因素,误差产生的原因,并对误差公式的准确性进行了验证。标定结果标明,标定结果符合误差分析,验证了误差公式的准确性。该标定方法为该类型系统的标定提供了新的理论和方法,同时完善了实验室标定方法,提高了实验室标定的可操作性,填补了行业内的技术空缺,可以作为统一的规范或要求进行推广。
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
应用数学(2020年2期)2020-06-24
汽车维修与保养(2020年11期)2020-06-09
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
光学精密工程(2016年3期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
新闻前哨(2015年2期)2015-03-11
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
