
基于无人机航空摄影测量的高程数据提取方法分析
2019-04-11 01:05王晓庆
资源导刊(信息化测绘) 2019年3期
王晓庆
(鹤壁市土地收购储备中心,河南 鹤壁458030)
1 引言
无人机航空摄影测量作为一种新型的测量方式,具有成本低、机动灵活、工作效率高等优点,在小区域和飞行困难地区快速获取高分辨率影像方面有明显优势,可极大地减少测绘外业工作量,大幅度提高工作效率[1]。当前,通过无人机航空摄影测量技术可以轻松获得小于等于1∶1000比例尺的数字化地图成果。如果采用倾斜摄影测量技术,选择适当的数据后处理方法,获得的成果精度甚至更高[2]。在数据处理过程中,数字化成果的平面精度较易达到规范要求,而高程数据的精度则不易达到[3]。但在实际应用中,数字化成果的高程数据往往需要达到较高精度,这就对无人机航空摄影测量的高程数据处理提出了要求[4]。
内业数据处理时,无人机摄影测量生产的点云数据在地物与植被表面生成大量杂波数据,批量提取时会得到一部分非地面高程数据。同时,部分区域关键特征点的高程数据会有缺失,需要在作业过程中对高程数据区别提取。不同的提取方法对高程数据精度及效率的影响不同。本文介绍了三种不同的高程数据提取方法,对其技术流程进行了研究,并对其作业效率、获得的数据精度进行了对比分析,总结了不同高程数据提取方法的适用范围。
2 高程数据的提取方法
当前,无人机航空摄影测量获取的数字化成果主要有点云、三维模型、数字表面模型、数字高程模型等[5]。在上述数字化成果的基础上,提取高程数据的方法主要有人工提取法、点云分类提取法和地面模型提取法。
2.1 人工提取法
目前,人工提取法主要有两种提取方式:
(1)利用数字表面模型(DSM)提取高程数据。数字表面模型是指包含植被、建筑、地面地形形态的数字化表达。首先,在正射影像图上判读地面点,并按照一定密度提取相关地面特征点。其次,利用数字表面模型的高程信息提取地面点的高程数据,操作软件为Global Mapper。
(2)利用三维模型提取高程数据。三维模型是计算机技术对实地地物、地形、植被的模拟,既包含地物、地形的高程信息,又包含其纹理色彩,可一次性提取点位的平面与高程数据。利用无人机航空摄影测量数据生成三维模型后,在三维模型上直接提取高程点,操作软件为山维EPS。
人工提取法与传统测绘手段类似,即在主要地形特征点处,按照适当的间距提取地面特征点及其高程,生成高程数据成果,其技术流程如图1 所示。
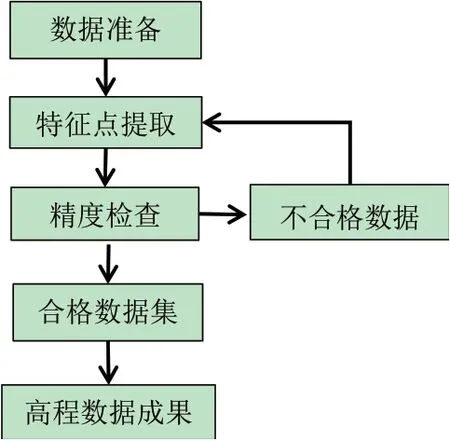
图1 人工提取法提取高程数据流程
2.2 点云分类提取法
在相同坐标参考系下,通过获取目标物体表面采样点的空间位置信息和表面特征属性信息,得到海量点的集合,点云包含点的空间位置信息和RGB 颜色信息,能够最大程度地还原被测目标物的原始形态[6]。
点云分类提取法主要是通过软件自动筛选,将无人机摄影测量生成的未分类点云数据按照地物类型进行分类,批量提取地面高程数据。根据分类后形成的地面点、建筑物、植物、噪声点等信息,提取所需的高程数据。此法有多种软件可用,如Photo Scan、Pix4D Mapper、INPHO。数据处理软件在无人机数据处理过程中直接进行点云数据生成、编辑与分类,也可通过Global Mapper、Point Cloud Tools、Terra Solid 等第三方软件,对未分类的点云数据进行分类。根据分类结果,提取高程数据,技术流程如图2 所示。
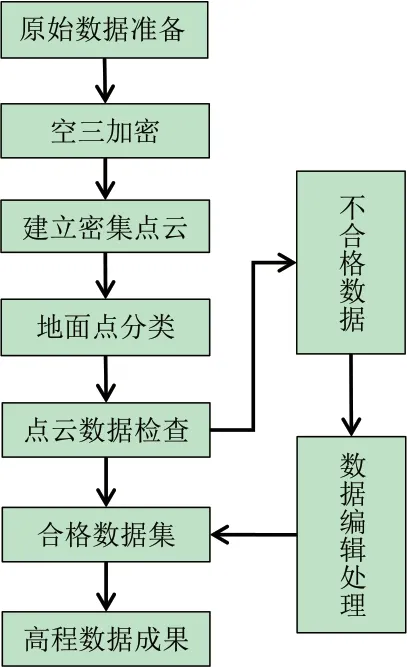
图2 点云分类提取法提取高程数据流程
2.3 地面模型提取法
地面模型提取法主要有两种方式:
(1)点云逆向模型法,用软件对点云数据进行初步分类,再利用分类后的地面点云数据提取地面格网模型。生成地面模型后,用格网编辑功能对格网进行平滑、局部替换、拉伸等编辑处理,形成近似于DEM 的地面模型,操作软件有3DReshaper、Geo Magic 等。
(2)直接对生成的OSGB 三维模型数据进行修改,剔除非地面模型,提取地面模型,操作软件有Geo Magic、DP modeler 等。
通过这两种方式提取的地面模型检查合格后,经数据转换形成高程数据成果,技术流程如图3 所示。
3 实例分析
选择某580m×370m 的近梯形区域进行无人机航空摄影测量,对数据进行初步处理后,利用上述三种方法提取高程数据,对提取的数据进行精度分析和生产效率对比。在飞行区域共布设6 个像控点,平均间距为280m;检查点是33 个,平均间距为60m。无人机平台采用大疆精灵4Pro,相机型号为FC6310,图像像素为5472×3648,像素大小为2.4μm,焦距是8.8mm,飞行控制软件为PIX4D CAPTURE,飞行高度为130m,地面分辨率为3.6cm。数据处理软件采用Pix4d Mapper,生成的初级成果主要为OSGB 格式三维模型、数字表面模型、数字高程模型、LAS 格式点云数据等。
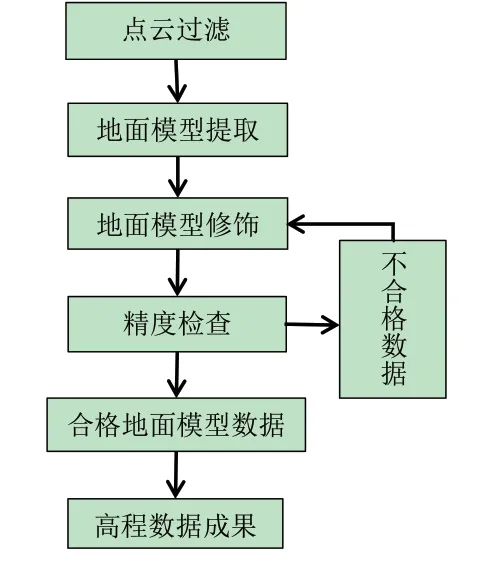
图3 地面模型提取法提取高程数据流程
3.1 效率分析
3.1.1 人工提取法作业
利用人工提取法提取高程点,有效高程提取时间约4h。其最大优势为基本适用于各种地形;弊端在于效率较低,在植被覆盖多及建筑物密集的地方,无法提取到足够的高程数据,需要对高程缺失区域进行高程内插数据处理,内插数据工作量较大。
3.1.2 点云分类提取法作业
利用软件对点云自动分类用时约5 min,但是分类结果不理想,有较多植被和建筑物仍被认为是地面点,同时杂波数据较多。分析后发现:在建筑物密集、植被覆盖度高、地形起伏大的地区,分类结果较差;在地表植被覆盖度低的区域,分类结果尚可。
对点云数据进行人工分类,分类结果较为理想,但是效率低。在植被覆盖度较高、建筑物密集的区域由于有效高程点的大量缺失,在人工分类时仍需进行高程数据内插,作业流程较为繁琐,用时约2.5h。
3.1.3 地面模型提取法作业
利用软件从点云数据中提取地面三维模型,用时约3 min。提取时已对点云数据进行噪声过滤,生成的地面三维模型数据与真实地面情况近似度较高。在因树木覆盖等未能准确提取地面模型的区域,可以进行地面模型修饰,以得到理想的地面模型。实验区域利用地面模型提取法提取高程数据用时约1h。在丘陵、山地等高差较大区域,该方法可以较快提取地面模型,模型修改过程也较为轻松。
三种作业方法的效率及适用区域统计如表1所示。
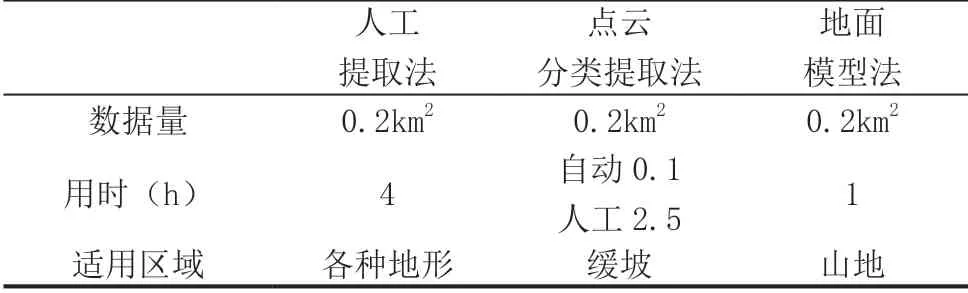
表1 三种方法生产效率及适用区域统计
3.2 提取的高程精度分析
利用RTK 作业模式,野外实地采集关键地形特征点,进行高程精度验证,野外实地共采集主要特征点78 个。高程精度统计如表2 所示。
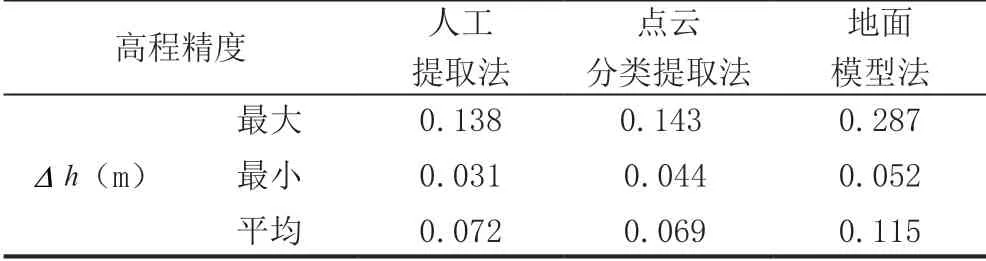
表2 特征地物点高程精度统计
通过表2 可以看出,人工提取法和点云分类提取法提取到的高程数据精度较高。因地面模型的连续性等问题,地面模型提取法提取的部分数据可能会偏离地表形状,在植被覆盖度高、坑塘水面等区域会出现点云失真情况,高程提取精度相对较差[7]。但是三种作业模式提取的高程数据精度均能满足小于等于1∶1000比例尺数字化测图的精度要求。
4 结论
通过对三种高程数据提取方法的作业流程、获得的数据精度等进行分析,可以得出结论:(1)人工提取法适用区域较广,提取的高程精度也较高,但工作量大,效率低。(2)点云分类提取法适合地形起伏较缓、植物覆盖稀疏等区域,获取的高程数据精度与人工提取法得到的高程数据精度相当,作业效率尚可。(3)地面模型提取法适合丘陵、山地等高差较大区域,作业效率高,但高程数据精度相对较低。
在无人机航空摄影测量内业成图过程中,可综合考虑地形地貌、数据精度、生产效率等因素,因地制宜,选择合适的提取方法,科学合理地开展测绘任务,以获得理想的高程数据成果。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
一重技术(2021年5期)2022-01-18
资源信息与工程(2021年5期)2022-01-15
资源信息与工程(2021年5期)2022-01-15
当代陕西(2020年23期)2021-01-07
航空知识(2019年1期)2019-01-11
电子制作(2018年11期)2018-08-04
环球飞行(2018年7期)2018-06-27
消费导刊(2017年8期)2018-01-18
科技创新与应用(2017年5期)2017-03-16
