
基于下垂控制的光伏系统低电压穿越研究
2019-04-17 08:04于孟然
通信电源技术 2019年3期
于孟然
(黑龙江科技大学 电气与控制工程学院,黑龙江 哈尔滨 150022)
0 引 言
随着环境危机的加重和能源的发展,光伏并网系统在新能源发电技术中的优势越来越大。由于分布式光伏发电单元数量的增多,人们对输出的控制要求越来越高,需要光伏逆变系统具备低电压穿越(LVRT)能力。因此,本文重点研究了光伏逆变器的低电压穿越控制策略。
通过对单级式光伏并网逆变器的分析,提出了抑制电网的负序电流,从而实现了低电压穿越[1]。针对光伏并网逆变器的双闭环控制,本文重点研究了电压环和电流环的参数识别方法[2-3]。通过优化输出电流的三相对称性,减小了电网的负序电流[4]。通过实时数字仿真器技术控制光伏并网逆变器,增加了卸荷电路,降低了直流测电压[5]。
通过对光伏并网逆变系统低电压穿越问题的分析,在DQ双闭环的基础上增加Droop环节,采用下垂控制向逆变器注入无功功率的LVRT控制策略,并通过仿真进行了验证。
1 光伏逆变器建模和低电压穿越分析
系统光伏逆变器的拓扑结构,如图1所示。
图1中,Udc为直流侧电压,C为直流侧电容,Ux(x=a,b,c)为逆变器输出相电压;ix为逆变器接入并网点的电流,L为滤波电感,R为线路等值电阻,ex(x=a,b,c)为逆变器经滤波后输出的并网相电压。
逆变器工作中,任意时刻都会出现一个桥臂的一个开关管导通,而另一个开关管关断的情况,组成了多种开关运行状态。因此,定义逆变器函数为:

图1 光伏逆变器拓扑结构图

其中,k=a,b,c。
逆变器由二极管的8个状态决定,如表1所示。

表1 逆变器开关状态表
不同的开关状态,逆变器有不同的输出。因此,通过控制逆变器开关状态的组合,控制逆变器的输出电流。
《光伏电站接入电力系统技术规定》GB/T 19964-2012中,分别对光伏电站并入电网的低电压穿越、无功及电压调节等方面提出了要求。如图2所示,当在曲线以下时,可切除并网逆变器;当在曲线以上时,必须在保证逆变器安全的前提下,不间断地并网运行。
2 低电压穿越控制策略
三相并网逆变系统的控制中,基于电网电压定向矢量的双闭环控制策略具有稳态无误差跟踪、动态响应快及独立解耦控制等优点[2]。一般控制方法采用电压外环加电流内环的方式。分析时,需将三相坐标下的电压方程变为两相旋转坐标系下的电压方程。经派

图2 低电压穿越要求
克变换后,得到方程:
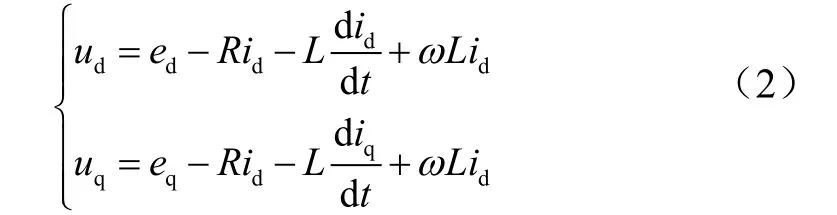
其中,ed、eq为电网电压的DQ分量;ud、uq为逆变器输出电压的DQ分量;id、iq为逆变器输出并网电流的分量;ω为电网侧的角频率。
电压矢量控制d轴与电网电压合成矢量E同轴,q轴与E垂直,在DQ坐标轴下的数学模型为:

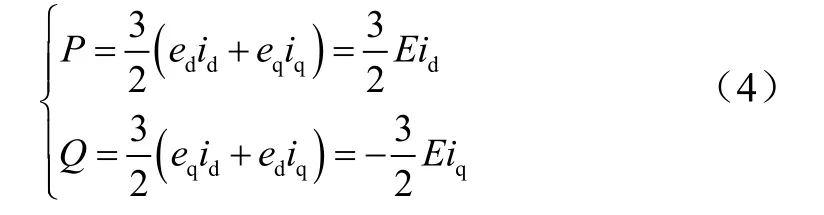
通过瞬时无功理论可得,输出的有功功率P、无功功率Q与id、iq的关系为:
3 Droop控制算法
传统的控制算法中增加Droop环节,有利于逆变器工作时分配有功功率和无功功率,并准确分配电压和无功功率[6]。低电压穿越时,需逆变器输出无功,以支撑过电压跌落[7]。
图3为下垂控制特性图,逆变器的有功功率输出通过调节频率控制,逆变器的无功功率输出通过调节电压的幅值控制。

图3 下垂控制特性图
下垂控制的特性表达式为:

其中,ω*为频率设定点,u*为电压设定点,m和n为下垂系数,控制结构如图4所示。
在电压环和电流环之间增加Droop控制算法,得到控制原理框图,如图5所示。

图4 下垂控制结构图

图5 系统控制原理图
4 仿真验证
采用MATLAB/simulink仿真模块对光伏逆变器低电压穿越进行仿真验证。设置电压在0.7~0.9 s中出现三相电压跌落,则逆变器输出的电压和功率的波形如图6和图7所示。
通过仿真波形观察可知,故障期间,逆变器向电网提供无功功率,并持续到故障结束,符合低电压穿越要求。
5 结 论
本文分析了光伏并网逆变器的拓扑结构原理,建立了数学模型,提出了在传统电压外环和电流内环中增加Droop环节的方法,并通过MATLAB软件仿真验证了其可行性。

图6 逆变器输出电压波形

图7 逆变器输出无功功率波形
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
能源工程(2022年1期)2022-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年1期)2017-11-24
电子制作(2017年1期)2017-05-17
舰船科学技术(2015年8期)2015-02-27
中国航海(2014年1期)2014-05-09
