
港珠澳大桥沉管隧道贯通测量方法
2019-04-18 00:59李平
铁道勘察 2019年2期
李 平
(中铁武汉大桥工程咨询监理有限公司,湖北武汉 430050)
1 概述
国内沉管隧道测量技术起步较晚,主要是一些高校及科研机构进行了相关研究。李全海、丁美等对海底沉管隧道对接测量方法进行了研究,建立了沉管沉放过程中实时显示管段位置的测量方案与计算理论,但是未考虑已沉管节工况及荷载的影响[1-2];雷巨光研究了沉管隧道施工控制测量方法[3]:采用多台全站仪同步实时测量,实现了对管段的实时监控。赵坤对港珠澳大桥沉管隧道测控系统进行了研究[4],提出了声呐法与RTK-GPS相结合的大型沉管隧道管节水下定位方法。以往研究多为对单个沉管位置的观测及监控,而对沉管隧道贯通测量领域的研究较少。沉管隧道贯通测量工作是整个测控系统中的重要组成部分,也是关系到整个沉管隧道能否顺利贯通的重要环节。贯通测量的作用主要有两方面:一是精确测量已沉放管节的安装姿态及安装期的横向变形,以此决策管节的下一步施工(精调整、回填、基础加固等);二是根据已安装管节姿态数据,指导下一个对接管节的预制及安装过程的姿态控制,实现整个隧道的顺利贯通。
以港珠澳大桥沉管隧道E24管节为例[5],介绍沉管隧道贯通测量过程并对结果进行分析。
2 控制测量
2.1 控制网等级
洞外定向边按照首级加密网的要求布设[6],平面控制网测设技术要求参照《公路勘测规范》(JTG C10—2007)[7]中公路二等执行,高程控制网测设技术要求按照《国家一、二等水准测量规范》(GB/T 12897—2006)[8]中二等水准网的标准进行施测。洞内控制网采用左右行车道交叉双导线联系控制测量,测设技术要求按照《公路勘测规范》(JTG C10—2007)和《高速铁路工程测量规范》(TB10601—2009)[9]中有关规定执行,洞外定向边及进洞导线见图1。

图1 洞外定向边及进洞导线示意
2.2 洞外定向边布设
洞外采用三点定向进洞测量,LJX2、RJX2点分别设在非通航孔桥面,采用强制观测墩;SJM08为首级加密控制点,布设在西岛测量平台上,DLQ5、DLQ6点分别设在挡浪墙顶,采用强制观测墩。每次贯通测量前,按照《公路勘测规范》中公路二等GPS网技术要求进行观测。
2.3 洞内控制网布设
(1)控制网形的确定
隧道贯通测量洞内控制网布设形式有:单车道单导线、单车道双导线、双车道双导线等。港珠澳大桥沉管为三孔一管廊的结构形式,管节宽37.95 m,左右车道间的中隔墙上设有互通逃生通道。结合管内结构形式,贯通控制网选用网形结构好、内符合精度高的双车道双导线网。
①控制点布置
为提高控制网的整体精度,应尽量增大点间的距离,以减少控制点的布置。影响导线网边长延伸方向点间距的因素有:隧道平曲线、纵坡、洞内施工布置(可调控)、洞内湿度及烟尘浓度等。本工程采用的双导线网最大边长为720 m,分别在车道两侧边沟处设置强制观测墩,左右车道控制点通过中廊道侧墙逃生孔进行观测,形成双导线网形结构(其联系边长最小为21 m,导线网角度均小于30°)。
②精度分析
设导线测角精度为0.5″,观测边长平均为540 m,受条件限制,网形结构存在小角度、长短边长比例悬殊等情况,实际计算时,对于短边(如中廊道侧墙逃生孔处的联系边),只考虑角度闭合差的影响[10]。通过计算可得沉管隧道的综合横向贯通误差影响值,洞外GPS控制测量引起的横向贯通误差为13 mm,洞内导线测量引起的横向贯通误差为23 mm,则洞外、洞内控制测量误差所引起的总横向贯通中误差为[11-12]

根据上述分析,采用行车道布设交叉双导线满足沉管安装的设计要求(±100 mm)。
(2)平面控制测量
①洞外定向边
洞外定向边采用GPS静态测量,GPS接收机静态精度应不低于5 mm+(1×10-6)D,按照《公路勘测规范》中公路二等GPS测量技术要求执行。
②洞内导线
隧道内双导线网测量具有测边角度小、人工照准困难、有效测量时段短等特点。测量过程中,采用Leica TS30高精度全站仪自动全圆法多测回测角,以减小人为因素给观测精度带来的影响。
(3)控制网计算及精度
①洞外控制网平差计算
首先采用TGO商业软件进行基线计算,然后用CosaGPS工程测量网通用平差软件进行平差计算。
采用ITRF2005框架坐标系进行三维无约束平差,LJX2大地高的中误差为±0.25 cm,满足“控制网最弱点大地高中误差≤10 mm”的要求;根据隧道工程坐标系的二维约束平差,最弱点点位误差见表1,LJX2的北坐标分量X中误差为0.04 cm,东坐标分量Y中误差为0.04 cm,点位误差P为0.05 cm,满足“平面控制网最弱点点位中误差≤±5 mm”的要求。跨海基线最弱边为LJX2-DLQ5,其边长相对中误差为1/166 000,满足“GPS平面控制网跨海最弱边边长相对中误差≤1/15万”的要求。

表1 最弱点点位误差统计 cm
②洞内导线平差计算
使用“科傻地面控制测量数据处理通用软件包(CODAPS)”进行导线网的平差。洞外控制网起算点采用《岛隧工程首级控制网第十六次复测成果》,最弱点、最弱边及其精度见表2和表3。

表2 最弱点及其精度 cm

表3 最弱边及其精度
2.4 高程控制测量
在东、西人工岛非通航孔桥台上分别布设一组高程基准点,桥台基础采用直径1.5 m嵌岩灌注桩(长时间监测非常稳定),每个管节沉放前,均从测量平台控制点引测至高程基准点。跨海三角高程测量按《国家一、二等水准测量规范》中二等跨江三角高程测量技术要求施测,岛上水准测量按国家二等水准测量技术要求联测至高程贯通测量控制点G23。采用CODAPS软件进行平差计算。
根据《国家一、二等水准测量规范》(GB/T 12897—2006)中的规定,各双测回的互差限差公式为

各测回互差数据见表4,各测回互差最大值均满足限差要求。

表4 测回数据统计 mm
注:每千米水准测量偶然中误差MΔ取1.0 mm。
3 已沉管节位置测量
在预制场进行管节标定工作,获得管节各特征点标定成果,通过坐标系转换参数,计算管节沉放后的设计位置参数(坐标、高程、坡度等);在洞内贯通控制点设站,测量管节特征点坐标,与管节特征点理论坐标进行比对,获得已沉管节平面位置、高程及姿态偏差[13]。
3.1 管节标定
建立预制厂坐标系、管节坐标系及隧道工程坐标系间的转换关系,获得管节特征点的隧道工程坐标系成果,用于管节沉放后的精度分析。

图2 管节内部贯通特征点布置
管内贯通特征点布置见图2,管节内布设4个姿态特征点及2个中廊道贯通测量平高点(共计6个特征点)。在预制场加密控制点设站,对特征点采用盘左盘右观测(测量结果取平均),获得其平面位置。高程测量:从管外引水准高程进入管内,获得特征点的管节坐标成果。隧道工程系下坐标成果见表5。

表5 E24管节贯通特征点隧道坐标成果
注:此表坐标为安装到位(S1端钢壳里程为K8+582.892)后各特征点隧道坐标值,高程值已加预留沉降量4 cm;上表贯通点(GT)和管内沉降点(E24L/R)Z为特征点顶部高程值,管节设计纵坡为-0.023%。
3.2 平面和高程
管节沉放到位后,采用洞内导线测量成果,仪器设站点为DW24-1,后视点为DW23-1,采用左右角两个测回,测量E24管节GT1和GT8点的三维坐标。与贯通点标定成果进行对比,获得E24管节安装轴线和高程偏差(见表6)。
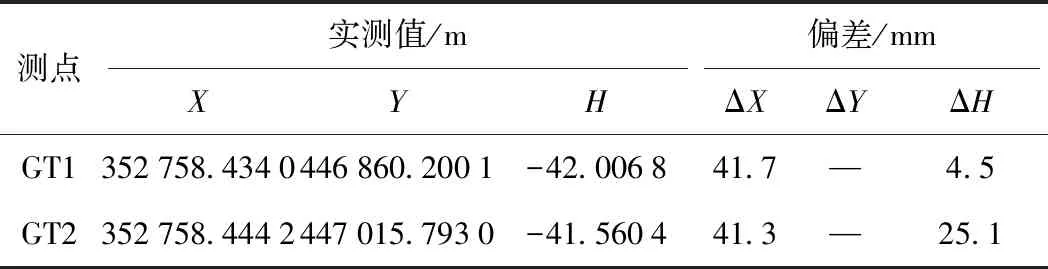
表6 E24管节精调后贯通测量轴线偏差
说明:表中“X、Y、H”值为港珠澳大桥坐标系值,相应的偏差ΔX即为管节轴线偏差(正为北偏、负为南偏),ΔY为管节纵向坐标(正为偏东、负为偏西),ΔZ为管节高程偏差(正为偏高、负为偏低)。
3.3 姿态测量
(1)管节纵向坡率偏差
根据安装管节特征点GT1和GT8的实测高程和距离,采用三角函数计算管节纵向坡率,并与设计坡率进行对比,得出纵向坡率偏差(见表7)。

表7 E24管节纵向坡率偏差测量数据
注:(1)表为车道上标定高程点纵向坡率偏差结果,纵向坡率偏差为-0.013%,设计纵向坡率为-0.023%,故实测坡率为-0.036%;
(2)贯通测量,管节压载至1.05抗浮安全系数。
(2)管节横向坡率偏差
根据管节二次标定提供的左右行车道E24L1、E24R1和E24L2、E24R2两组对称高程值,采用电子水准仪同步测量两组点的高程,并根据两点的距离、实测高差与设计高差偏差,计算E24管节的横向姿态、管节横向坡率偏差(见表8)。

表8 E24管节横向坡率偏差测量数据及计算
注:(1)管节设计横坡为0,测点布设在管节侧墙内侧;
(2)贯通测量时,管节压载至1.05抗浮安全系数。
3.4 与上一管节的相对关系
管节间的相对位置关系包括水平向相对偏差和竖直向相对偏差。根据管节安装定位测量成果及端钢壳间的距离关系,贯通测量成果应考虑截止本管节安装前的沉降位移累计检测值,E24管节与E23管节相对偏差见表9。
3.5 已沉管节位置测量结果
(1)管节艏端(对接端)轴线向北偏移了41.7 mm,高程偏高4.5 mm;管节艉端轴线向北偏移了41.3 mm,高程偏高25.1 mm;均满足设计要求。

表9 E24管节与E23管节相对关系 mm
注:E23管节推算数据以贯通结果(E23轴线贯通成果以E24贯通控制网重新测量)加截止2015年12月20日监测值计算;竖直向定位相对偏差中未考虑两管节碎石层预抬量差值5 mm。
(2)E24管节设计纵向坡率为-0.023%,实测值为-0.036%,偏差-0.013%。
(3)E24管节安装设计横向坡率为0,实测值艉端偏差为0.0004%,右车道(北侧)高于左车道(南侧)。
(4)E24与E23管节端面相对偏差:E24横向(水平向)偏北0.8 mm,竖向偏高13.8 mm,满足设计要求。
3.6 注意事项
(1)考虑岛上无稳定的基准点,每次管节沉放前,均需对洞外控制网按照规定的技术要求进行复测,作为洞内导线的起算成果。
(2)若已沉管节工况发生变化,应按设计要求对管节进行监测,指导下一管节碎石垫层的预抬量。
(3)对已沉管节变形监测数据进行分析及预报,为后续管节的安装及调整提供可靠依据[14]。
(4)碎石垫层整平完成后,及时进行管节沉放,以防止回淤对管节安全及沉放精度的影响[15-16]。
4 结束语
贯通测量工作是指导沉管隧道管节安装的关键技术手段之一。以港珠澳大桥沉管隧道为研究对象,洞内导线采用双车道双导线法测量(导线长边平均边长540 m)。使用Leica TS30高精度全站仪,自动全圆法多测回测角观测,高程采用水准法测量。经过平差计算,获得贯通控制点成果、测量贯通特征点及姿态特征点,通过计算成果与设计值的比对,管节轴线、高程、相邻管节横向及竖向相对偏差均满足规范要求。
猜你喜欢
施工技术(中英文)(2022年6期)2022-04-28
资源信息与工程(2021年5期)2022-01-15
黑龙江交通科技(2021年10期)2021-11-01
黑龙江交通科技(2021年9期)2021-10-13
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
科学中国人(2017年24期)2017-01-28
安全(2015年6期)2016-01-19
