
陆上复杂地形风电场自动布机方法研究
2019-04-20 07:15苗得胜吴迪刘怀西张敏刘飞虹
风能 2019年1期
文 | 苗得胜,吴迪,刘怀西,张敏,刘飞虹
随着我国风电产业的快速发展,陆上风电场的开发重心逐渐从高风速平坦地形区域转移到中低风速复杂地形区域。机位方案的好坏直接影响风电场的发电量,进而影响经济效益。因此,机位排布是风电场开发中的重要环节。
复杂地形风电场内海拔变化大,风速分布不均,风况复杂。布机时不仅要求机位点的风能资源好,还要求机位点、避开限制区域,入流角、风切变、湍流强度等风能资源参数满足规范和机组要求,机组之间满足最小机距要求等。目前,陆上风电场多采用手动布机的方式制定机位排布方案,但是风能资源工程师用手动布置的机位计算发电量并复核安全性时,经常出现一些机位点发电量过低或不满足某项限制因素要求的情况,必须调整机位点,重新计算和校核。因此,一些复杂项目往往需要重复进行选址、计算、校核才能制定一个合格的机位方案,耗费大量时间和计算资源。
基于此,研究一种针对陆上复杂地形风电场的自动布机方法具有实际意义。本文以解决陆上复杂地形风电场的布机难题为出发点、以发电量最优为目标,排布过程中考虑各项限制因素,提出了一种陆上复杂地形风电场自动布机方法。同时将该方法应用于实际工程项目中,通过与手动布机方案对比,验证了本方法的合理性和先进性。
自动布机方法
一、布机思路
基于风电场风能资源计算结果,提取测风塔修正后场区范围内的风能资源参数(高程、风速、入流角、风切变、湍流强度),结合风电场范围和限制区域、风电机组型号和机组要求、风电场布机要求,循环地在场区内寻找发电量最优的机位点,布机并更新风能资源图谱,直到选出所有机位点,完成布机。
将上述流程细化,得到自动布机的逻辑流程如图1所示。
在计算过程中,如果出现有效布机区域不足或者机位点风速低于用户设定最小风速的情况,程序会结束计算并给出提示。
二、关键技术
(一)考虑尾流效应布机
在确定每一台机位后,根据场内风速分布、粗糙度、测风数据和尾流模型,对整个场区内的风速图谱进行计算并更新,然后根据新的风能资源图谱进行下一台机位点的选择。这一做法保证了风电机组不会置于临近风电机组尾流影响较大的区域内。

图1 自动布机逻辑图
计算尾流效应时,本文采用了改进的PARK尾流模型和Jensen尾流模型。这两种模型是目前风电行业内应用最为广泛的半经验尾流模型,被大多数风能资源计算和评估软件用来计算风电机组尾流效应。
改进的PARK尾流模型描述的风电机组后锥形尾流的风速减速因数Cwake计算公式如下:

式中,x为当前位置与风电机组在风向上的投影距离;Ct为推力系数,其值对应上风向风速,且要求0≤Ct<1;Crotor为产生尾流影响的风电机组风轮直径;Aoverlap(x)是下游受影响叶轮面与尾流影响截面的重叠面积;ADownWind(x)是尾流影响截面面积;k为尾流衰减因子。
其中,尾流衰减因子的计算公式如下:

式中,Iurot为产生尾流的风电机组轮毂高度处湍流强度。
Jensen模型计算风速减速因数Cwake的方法与PARK模型一致,计算尾流衰减因子的方法与PARK模型不同,公式如下:

式中,A为系数,一般取0.5;h为风电机组轮毂高度(m);z0为风电机组所在位置的粗糙度高度(m)。
尾流影响后的风速大小为:

式中,UAfterWake(x)为下风向距离风电机组x米处的尾流后风速;UBeforeWake(x)为下风向距离风电机组x米处尾流前环境风速。
在选择一台机组后,通过计算场区内每一个单元受到该机组的尾流影响来计算尾流后的风速大小。根据计算结果进行风速图谱的更新,计算流程如下:
首先,针对风电场内每一个单元,计算该单元与风电机组的距离,根据尾流影响范围判定是否受到该风电机组的尾流影响。
然后,对受到影响的单元,计算该单元受到风电机组影响的风向范围,并计算该风向范围在测风数据中的风频占比。计算方法如下:

式中,ProbDirRange为该单元受影响的风向范围的风频占比,ProbDirStart是该单元顺时针方向上开始受到风电机组尾流影响的风向累计概率密度函数,ProbDirEnd是该单元顺时针方向上结束受到风电机组尾流影响的风向累计概率密度函数。
之后,计算受影响单元的风速减速因数,计算受影响后的风速,结合受影响的风频占比,计算尾流影响后的风速。计算公式如下:

最后,根据所有网格的计算结果,生成新的风速图谱。基于更新后的风速图谱,进行下一个机位点的选择。
(二) 不合理机位剔除
由于在布机过程中无法考虑机位点分布对道路和集电线路成本的影响,本方法加入了基于机位分布的孤立机位检测算法,来检测并剔除远离机群的机位。
激活不合理机位剔除功能后,可以根据用户设定的剔除标准进行不合理机位点筛选,避免发生因单台机位修路过长导致道路成本过高的情况。不合理机位剔除示意图如图2所示。
根据设定的剔除标准,对图2中机位排布方案进行不合理机位点筛选,发现风电场正北方有一台孤立机位,东南方有两台孤立机位,如图中红色点位所示。剔除这些机位点,可以大大减少场内道路成本。
项目验证
选取实际工程项目,采用本文所述方法进行布机,与传统手动布机方案进行对比,验证本方法的合理性和先进性。
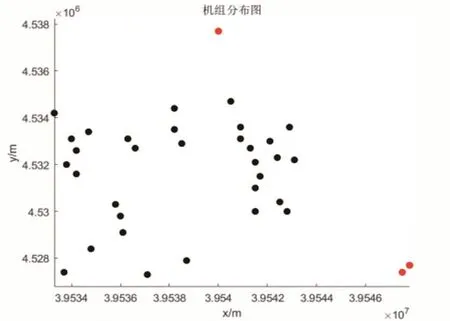
图2 不合理机位剔除示意图
一、项目概述
该项目位于河南省南部山区,属于典型的中低风速复杂地形山区风电场。风电场边界如图3中灰线所示,占地约110km2。风电场中有一处野生动物保护区,边界如图3中红线所示,占地面积约40km2,此区域内不能布机。有效的布机区域占地约70km2。
风电场规划容量为100MW,业主要求采用MySE3.2-145低风速机型,共计32台。
风电场内有一座测风塔位于保护区边界上,如图3中E1所示位置。测风塔主风向为东北偏东,次主风向为西南偏西。主风向和次主风向风频占比较大。测风塔年平均风速为4.43m/s。该测风塔完整年数据的风速分布图和风向玫瑰图如图4(a)、图4(b)所示。
二、风能资源数据
布机所需风能数据包括:采用风能资源计算软件WT进行定向计算,并用测风塔数据进行综合计算,获取风电场测风塔高度等高面的风能资源参数图谱(包括平面坐标、高程、风速、入流角、风切变、湍流强度、威布尔参数等);风电场密度下MySE3.2-145机型对应的功率曲线;风电场内测风塔修正后的平风年风速风向数据。
三、控制参数设置
按照业主要求,机位方案要满足规范安全要求和机组安全设定。需要考虑的限制因素有:风电场边界、风电场限制布机区域、最小机距、入流角、风切变、最低布机风速。设定风电场布机的限制因素如表1所示。
四、计算结果
采用本文所述自动布机方法,基于上述风电场要求进行风电场机位方案的排布,得到机位方案如图5所示。采用自动布机方案计算得到的风速图谱如图6所示。
业主提供的手动布机方案同样采用32台3.2-145机型,机位分布如图7所示。采用手动布机方案计算得到的风速图谱如图8所示。
对比图6和图8,可以发现自动布机方案在高风速山脉上的布机更为紧凑,在满足3倍风轮直径的机距前提下,充分利用了场内资源。同时,与手动布机方案相比,自动布机方案筛选并剔除远离主机群的机位,降低了道路建设成本。
将自动布机方案与业主方手动布机方案的相关评价指标进行对比,包括:尾流前后的平均风速、折减后的年利用小时数、风电场年发电收益。计算过程中,上网电价取0.42元/千瓦时,发电量折减取0.8。对比结果如表2所示。

图3 风电场范围示意图
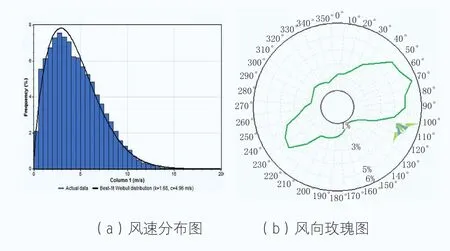
图4 风速风向分布图
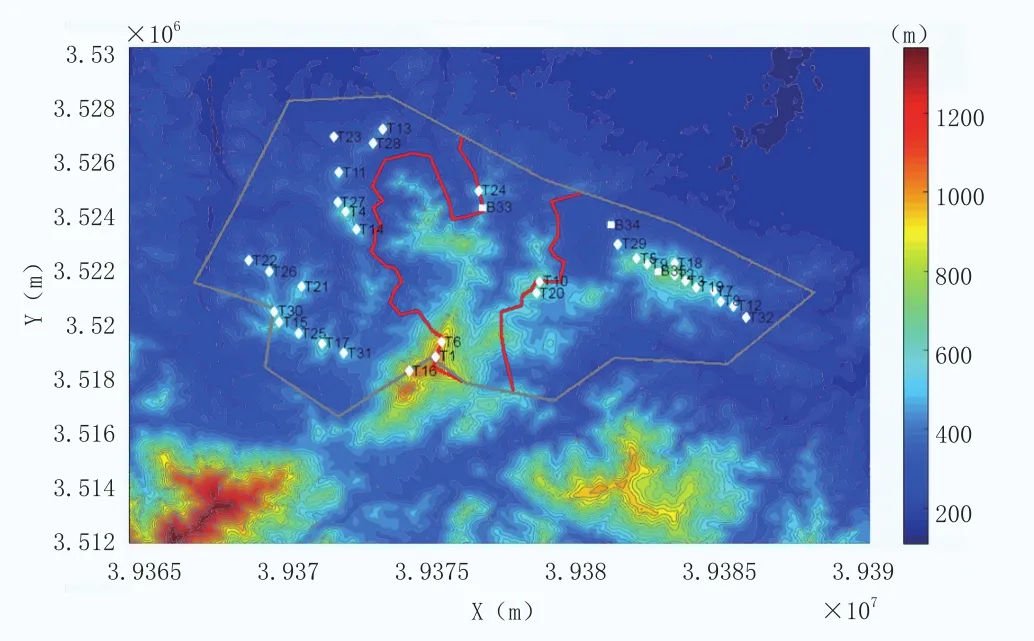
图5 自动布机方案示意图
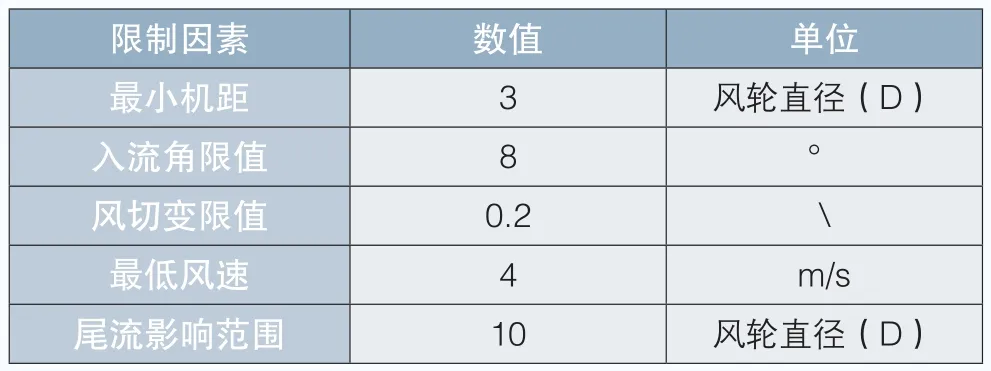
表1 风电场布机限制因素
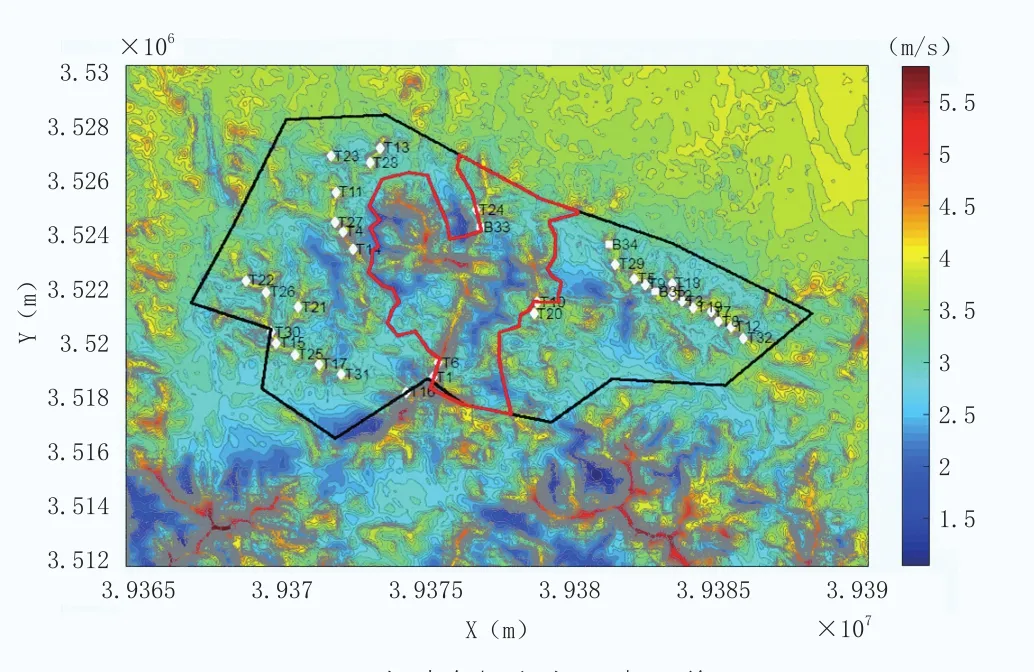
图6 自动布机方案风速图谱
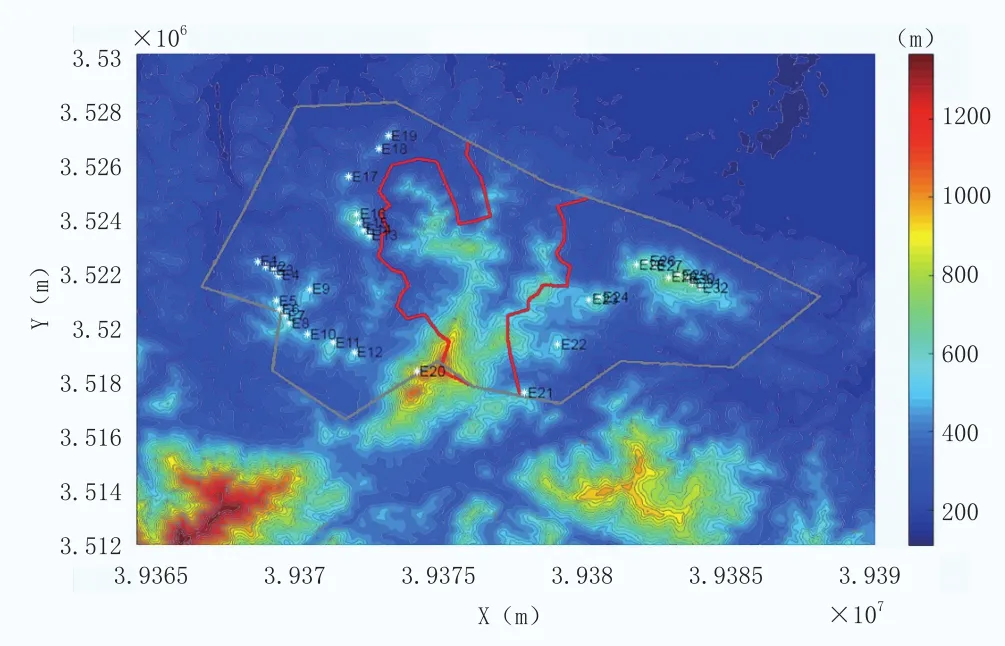
图7 手动布机方案示意图
图8 手动布机方案风速图谱
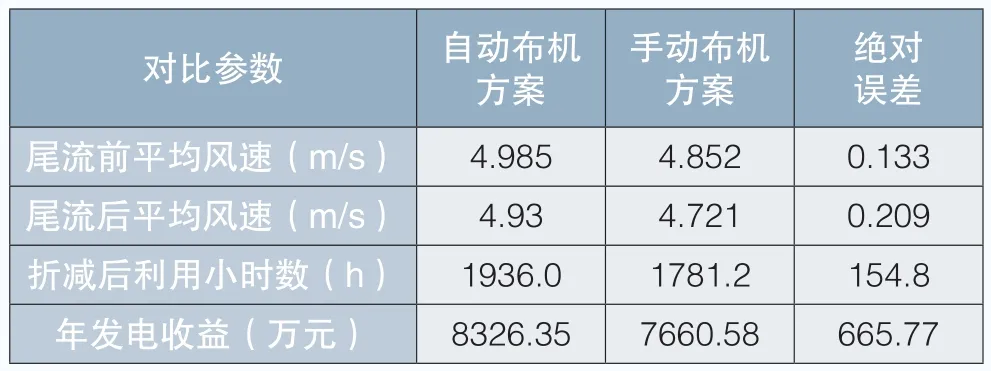
表2 自动布机方案与手动布机方案对比
表2中数据显示,采用本文所述方法得到的机位排布方案在尾流后平均风速、平均利用小时数、风电场年发电收益上均优于业主提供的机位排布方案。其中,尾流前平均风速高出0.133m/s,尾流后平均风速高出0.209m/s,折减后的年利用小时数高出154.8小时,整场年发电收益高出665.77万元。
通过对比可以发现,采用本文所述自动布机方法进行复杂地形陆上风电场布机得到的机位排布方案在发电量和经济收益上优势明显。按照25年的风电场运行期来计算,相对于业主的机位方案,采用本方法获得的机位排布方案可以给业主创造1.664亿元的额外发电收入。对一个100MW的陆上风电场而言,这一收益是非常可观的。
结论
本文提出了一种针对陆上复杂地形风电场的自动布机方法,实现了基于场内风能资源分布,同时考虑各项限制因素和风电场排布要求的自动优化布机。
此外,通过一个实际工程案例,对本方法的实用性和先进性进行了验证。对比业主提供的机位方案发现,采用本文所述自动布机方法获得的机位方案,在平均风速、年净利用小时数和年发电收益上均具有明显优势。这一结论验证了本文所述自动布机方法的科学性和实用性。本方法的主要特点总结如下:
(1)本方法以发电量最优为布机目标,获取的机位排布方案相比手动排布的方案具有明显的发电量优势。
(2)本方法在计算过程中实时计算风电机组尾流效应对排布的影响,因而获得的机位方案尾流损失明显较小。同时降低了尾流引起的机组安全风险。
(3)本方案在排布过程中考虑了规范中对于入流角、风切变等风能资源参数的限制,使得进行一次排布即可满足机组安全性要求,避免了手动布机时反复调整机位的情况。
(4)本方法加入了异常机位点剔除功能,对远离风电机组集群的机位点进行筛选和剔除,避免了某些机位点道路和集电线路成本过高的问题。
(5)本方法具有较高的计算效率,在30分钟内完成计算并输出机位方案,极大地缩短了布机时间。
猜你喜欢
工业建筑(2022年3期)2022-08-01
建筑机械化(2022年2期)2022-03-06
小天使·五年级语数英综合(2021年9期)2021-09-18
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
科技和产业(2021年1期)2021-02-22
军事文摘·科学少年(2017年2期)2017-04-26
雷达学报(2017年6期)2017-03-26
家教世界·创新阅读(2017年1期)2017-02-07
文理导航·科普童话(2016年3期)2016-04-26
