基于CNN模型的装甲目标的提取与实现
2019-04-22 06:53阮轶磊张雷李刚
科技与创新 2019年7期
阮轶磊,张雷,李刚
基于CNN模型的装甲目标的提取与实现
阮轶磊,张雷,李刚
(陆军装甲兵学院兵器与控制系,北京 100072)
基于卷积理论,从无人机拍摄视频、图片中提取装甲车辆目标,为指挥员决策提供依据。主要研究卷积模型的训练策略与过程,包括训练样本的选择、组织与预处理、卷积模型的改进与超参数设置,防止过拟合采取的策略,有效提高模型对装甲图片的识别效果。
卷积网络CNN;卷积理论;装甲车辆目标;训练样本
1 引言
随着部署于战场的传感器数量增加,指挥官们能轻易获得巨量的视频、图片数据,但对数据的分析、处理、应用依然缺乏有效手段。如何快速高效地在这些数据中找到感兴趣的目标并施以打击,对战争胜负将会有至关重要的影响。人工智能技术的快速发展,给目标筛选辨别带来了更为优化的选择。以察打一体无人机为例,如果机器能依据目标的图像特征、红外特征等自动做出判断,并主动发起攻击,其效率与毁伤效果将会成倍增长,真正做到发现即摧毁,战争模式将会发生根本改变。本课题力图以前沿的深度学习技术实现对视频图片中装甲目标的检测,努力将最有可能的作战对象呈现在指挥员面前,帮助他们删除干扰信息,抓住战机。指挥员一旦确定目标,就可以根据图片拍摄信息倒溯出目标出现的位置与时间,并由此推断出敌方行动计划,做出更为合适的应对(打击或回避)。
2 卷积网络CNN
卷积神经网络(CNN)是一种为了计算二维输入数据而经过特别设计的多层人工神经网络。网络中的每个层面都由多个二维面构成,而且每个平面之间互相由多个独立的神经元组成。CNN广泛应用于计算机视觉问题的处理上,采用多层卷积网络实现装甲图片分类的测试过程如图1所示。

图1 多层卷积网络图片分类示意图
一个典型的卷积网络分类器由多种不同功能层叠加而成,除了输入输出层,还应该包括卷积CONV层、池化Pooling层、全连接层,进而通过相关的得分函数输出分类概率,例如图片包含战场辨别敌军坦克的概率为96.35%.卷积神经网络作为一个媒介,一层一层把提供的原始图像数据转换成为最后的类别得分。其中,卷积层和全连接层包含权重和偏置,而RELU和POOLing层作为一个固定的函数运算。卷积层参数可看作一种有能力通过训练/学习进而达到目的的滤波器,在前向计算过程中,上层网络一定区域的数据和滤波器点乘后得到新的二维数据作为卷积层的神经元,滤波器按照一定的步长在原始数据上滑动,经过计算得出所有的新神经元,进而组成我们所需要的卷积层,如图2所示。

图2 卷积过程示意图
通过这种方式,卷积层的神经元只会和上一层的一些局部区域进行互相连接,如图3所示。每个所属的滤波器仅仅关注数据小平面内出现的部分特征,当出现它学习到的特征的时候,就会自动激活态,进行报警。
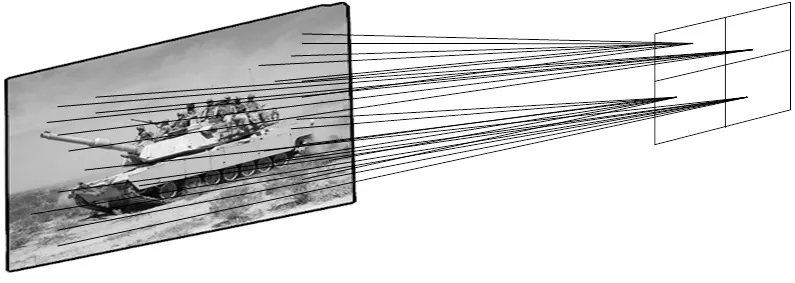
图3 卷积过程示意图
3 装甲图像训练集的获取与预处理
3.1 数据获取
训练样本的选取必须考虑客观性与代表性,努力与真实的应用场景相一致。本文中,除了包含各类装甲照片的正例样本,负例样本也必须是装甲车辆可能出现的道路、荒漠、草原、滩涂或丘陵。除了场景地域,样本还应体现季节变换、天气变化带来的植被改变与背景明暗差异,以及由于拍摄角度、障碍遮挡、目标运动等导致的形变问题。
基于装甲目标的图片样本获取,如果调用装备,采用无人机实地拍摄,可能会因审批困难、成本高昂、目标单一而中途夭折,并且得到的训练样本呈现高度一致化,将会导致过拟合现象出现。获取过程如下。
3.1.1 网页分析
在百度输入“装甲”进入图片搜索,如图4所示。任意选中一张图片,查看源代码,找到图片对应地址objURL。

图4 图片搜索结果
3.1.2 编写爬虫
需要下载的图片很多,因而外部使用一个循环,由于可能存在网址错误,再加一个超时控制,当搜索时间超过3 s,跳出循环;将上述网址传入requests,编写出正则表达式;最后将下载的图片命名、保存。完整代码如图5所示。

图5 图片爬虫源代码
3.2 数据预处理
数据预处理的常用方法包括去均值、PCA(主成分分析)。深度学习实践中,样本均值较大会导致权值更新过大,各层之间相互影响,整个学习过程低劣而缓慢。为了解决这一困难,通常做法是在不改变数据相对位置的前提下,对数据进行集中,先期将样本数据进行去均值、归一化处理,改善数据分布。其做法是将数据从普通分布,变成0均值、单位方差分布,让训练易于收敛,如图6所示。

图6 0均值与归一化处理
0均值的具体实现方法:首先计算所有图片样本均值,然后每一幅图片都减去该均值,如此,将数据从标准坐标系下的一个个向量组成的矩阵,变成以上述这些求解的向量均值为原点构建的坐标系。
PCA实现过程:将原始图片转换成一个列向量,整个训练集即可组成一个原始矩阵,对归一化后,对的协方差矩阵进行求解;而后对奇异值分解(矩阵),排列的特征值与对应的特征向量;然后依据特征值大小,判别所有的特征现象,从而对所有特征向量进行降序排列,得到矩阵.按照规定的信息提取规则提取的前列得到投影矩阵;最后将所有系统训练图片向投影即可得到降维后的所需数据。
4 基于Alexnet模型的装甲分类设计与实现
本文的目标是检测出图片中是否包含装甲图像,属于一个二分类问题,输入为图片,输出为类别,包含地方目标装甲图像输出标签1,否则设置系统输出标签0.采用的Alexnet模型如表1所示。
Alexnet的第一层结构是由卷积层组成的。第一层的输入为目标提供数据,由于深度学习的框架规则限制,系统对输入图片问卷大小有要求,因此统一将图片归一化为227×227大小的彩色图像,经过上述操作后第一次卷积操作和为11×11×3的大小,共用了96个滤波器,步长为4,那么该操作的神经个数就应该等于224×224×3=150 528.
通过卷积计算后的图片称为特征图,则卷积后的大小变为(224)/4-1=55,减一表示对于图片边缘需要删除,将处理后的55×55大小的特征图经过ReLu激活函数、Norm归一化,其输出数据的大小不会发生变化,之后再将卷积层连接池化层,给数据降维。最终输出特征图大小为27×27×96.两个卷积层之间的基本操作及结构类似于对第一层卷积层的计算,本次卷积操作中对新输入的特征图会进行一项填充操作,从而扩大小为5×5的卷积变为27×27,同时卷积核变为256个。池化操作降低维度为13×13,最终特征图大小13×13×256.第三个卷积层卷积核减小为3×3,同时也填充边长为1,滤波器的格式改为384个。ReLu的激活函数在第三层不连接池化层,因此最终输出的特征图大小13×13×384.第四个卷积层卷积核大小为3×3,因层数越深特征越抽象,也越重要,继续填充操作,之后进行ReLu,该层的卷积核不变。
表1 AlexNet各层结构的参数设置
输入图像大小(大小227×227×3) 卷积层1卷积核11×11,数量94,步长4,激活函数Relu输出特征图像大小:(225-11)/4+1=55即55×55×96 池化层1Kernelsize=3,stride=2输出特征图像大小:(225-11)/4+1=55即55×55×96 卷积层2卷积核5×5,数量256,步长1,激活函数Relu输入图像扩展2像素,输出27×27×256 池化层2Kernelsize=3,stride=2输出13×13×256 卷积层3卷积核3×3,数量384,步长1,激活函数Relu输入图像扩展2像素,输出13×13×384 卷积层4卷积核3×3,数量384,步长1,激活函数Relu输入图像扩展2像素,输出13×13×384 卷积层5卷积核3×3,数量256,步长1,激活函数Relu输入图像扩展2像素,输出13×13×256 池化层3Kernelsize=3,stride=2输出特征图像大小:66×66×256 全连接层14 096个神经元,dropout抽取4 096×1的特征向量 全连接层24 096个神经元,dropout抽取4 096×1的特征向量
第五个卷积层的卷积核为256,大小为3×3,填充大小为1,连接ReLu激活函数,之后连接池化层降维,设置步长为2,滤波器大小3×3,最终输出特征图为6×6×256.第六层网络结构为全连接层。将第五层的特征图作为输入,该层的神经节点个数为4 096,然后进行dropout,随机丢掉一些神经元或权重防止过拟合。本层最终输出节点为4 096个。第二个全连接层(fc7)是进ReLU(relu6)上一个全连接层(fc6)后进行随机丢弃操作全连接的所得到的结果。本层节点数目为4 096个。最后一层全连接层目的时对最终任务进行分类,本层输出节点2,二分类任务为2类对象。
特征提取是将训练样本映射到某个特征空间,缩小同类的特征距离,增大不同类间的特征距离,从而通过简单的分类器进行分类。特征提取后可以用监督学习的方法,学习得到两类问题的分类器,以判断目标出现在某一位置的概率。
5 结束语
本文基于卷积理论,研究如何从无人机拍摄视频、图片中提取装甲车辆目标,为指挥员决策提供依据。主要研究卷积模型的训练策略与过程,包括训练样本的选择、组织与预处理,卷积模型的改进与超参数设置,防止过拟合采取的策略,有效提高模型对装甲图片的识别效果。
[1]刘增良.模糊技术与神经网络技术选编[M].北京:北京航空航天大学出版社,2001.
[2]于功敬,厚泽,王振华.装备测试性设计与诊断策略优化技术研究[J].电子测量技术,2012,35(7).
[3]胡晓辉,张建国.基于改进卷积神经网络的图像超分辨率算法研究[J].计算机应用研究,2018(4).
[4]杨明,王冰,王春香,等.基于环视相机的无人驾驶汽车实例分割方法[J].华中科技大学自然报,2018(12).
[5]王潇天.基于深度学习的目标检测研究与应用[J].电子制作,2018(22).
2095-6835(2019)07-0049-03
TJ810.1
A
10.15913/j.cnki.kjycx.2019.07.049
阮轶磊。
〔编辑:严丽琴〕
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
无线互联科技(2020年12期)2020-09-03
装备环境工程(2020年3期)2020-04-03
科技创新与应用(2020年6期)2020-02-29
科学大观园(2019年10期)2019-09-10
中国经济周刊(2019年9期)2019-05-24
——中国制药企业十佳品牌
西部大开发(2017年5期)2017-07-05
现代电子技术(2016年23期)2017-01-12
电子设计应用(2004年9期)2004-09-17