
基于电子隧道效应的纳米梁非线性振动控制
2019-04-22 09:13姜瑞瑞刘灿昌秦志昌孔维旭周长城
振动与冲击 2019年7期
姜瑞瑞, 刘灿昌, 李 磊, 秦志昌, 万 磊, 孔维旭, 周长城
(山东理工大学 交通与车辆工程学院, 山东 淄博 255049)
随着微纳米技术的快速发展,纳机电系统(Nano-Electromechanical Systems,NEMS)的振动控制成为研究热点问题之一。纳米梁具有高固有频率、高承载能力、高灵敏度和低功耗等特点,常用来制作高频谐振器。但是,随着纳米梁尺寸的进一步减小,在大振幅振动中容易出现多值、分岔等非线性现象,导致谐振器出现不稳定振动,甚至产生吸合现象,影响NEMS器件的工作稳定性。因而,纳米梁的非线性振动控制成为微机电系统的一个重要研究方向。由于NEMS器件处于纳米尺寸,常用的振动信号传感器尺寸接近甚至大于控制器件的尺寸,难以应用于纳米梁振动控制,振动信号传感成为纳米梁振动控制的一个难题。
随着传感器技术的迅速发展,基于隧道效应的信号传感研究正逐步引起科研工作者的注意。Rockstad等[1]利用电子隧道效应原理制作了检测小位移的高性能加速度传感器。李梦超等[2-3]对基于隧道效应的纳米振动传感器的理论、技术及实现方法进行了初步的研究和探索,并进行了振动检测试验,得出基于隧道效应的测振传感器具有很高的灵敏度、良好的频率特性。夏一等[4]对隧道传感系统微位移机构的主从关联优化进行了研究,建立了物理模型并进行了优化计算和分析。陈帆等[5]基于隧道效应的原理搭建了闭环控制系统,利用仿真现象和实验结果进行控制特性和动态响应的分析。Opacak等[6-7]研究了电子在复势垒中的隧穿现象,并给出了共振频率表达式。
近年来,对于纳机电系统的非线性振动分析与控制研究取得较大的进展。张文明等[8-9]研究了参数激励作用下梁式微结构共振传感器的非线性响应。宋震煜等[10]利用连续体弹性理论建立了物理模型,并分析了纳米梁的幅频特性和纳米梁非线性产生的物理机制。Zhao等[11]研究了纳米梁的非线性自由振动,得到了非线性方程的近似解析解。Liu等[12]采用时滞反馈控制方法,研究得到了纳米梁谐波激励主共振的最优控制。Gong等[13]应用多尺度法求得系统超谐共振的幅频响应方程,分析了振动方程解的稳定性。Dumitru等[14]研究了静电驱动悬臂梁微谐振器的非线性响应。Rhoads等[15]通过提出一种新型的纳米梁结构装置,研究了受交流激励电压幅值控制的响应特性。Shaat等[16]研究了纳米材料的静电驱动梁梁结构和尺寸大小对静电驱动纳米梁固有频率、非线性动力学的影响。Najar等[17]在考虑了小尺度效应下,研究了在非线性力和直流电压作用下纳米梁的动态响应。Bornassi等[18]利用Euler-Bernoulli梁建立了纳米器件在静电力和分子间力作用下的运动方程,利用微分求积法求解非线性动力学方程。
利用时滞反馈对非线性振动进行控制成为非线性系统振动的重要研究方向。张舒等[19]介绍了时滞耦合系统中新的定量分析方法、具有耦合时滞的非线性系统中耦合时滞和非线性参数的辨识方法与实验实现等问题的研究进展。Sun等[20]提出了一种具有时滞耦合主动控制的非线性组合结构并建立了数学模型,对不同的结构参数和时间延迟进行了稳定性分析。Liu等[21]提出了一种优化的延迟反馈控制方法,以非线性振动稳定条件和最优时滞为约束条件,利用最优化方法计算获得最佳反馈控制参数。孙清等[22]采用增量谐波平衡法求得了含双时滞振动主动控制系统的周期解,得到当时滞量和反馈控制增益匹配适当时,可以使系统保持稳定状态。
本文研究了基于隧道效应信号提取的纳米梁非线性振动控制,将隧道效应理论应用于纳米梁非线性振动的信号提取中,提高了信号提取的灵敏性与精确性。以Euler-Bernoulli梁作为振动的物理模型,考虑时滞的影响,对静电激励下的纳米梁非线性振动控制进行了分析研究,得到基于隧道效应的纳米梁非线性振动方程,利用多尺度法得到纳米梁主共振的幅频响应方程。研究了直流和交流激励电压、阻尼、控制参数、时滞等与纳米梁振动稳定性和振幅之间的关系,分析了减弱系统非线性、增强系统稳定性的影响因素。
1 隧道效应传感原理
电子隧道效应是能量低于所面对势垒的电子贯穿通过该势垒的量子效应,可以用于电流信号检测,具有指数灵敏性[23],如图1所示。由隧道效应产生的作用于振动控制信号电压为
(1)
式中:κ为比例系数;V为偏置电压;β为转换因子;φ是势垒高度;d为纳米梁与极板间的初始距离;w为纳米梁振动时的挠度;R为控制电路中的采样电阻。
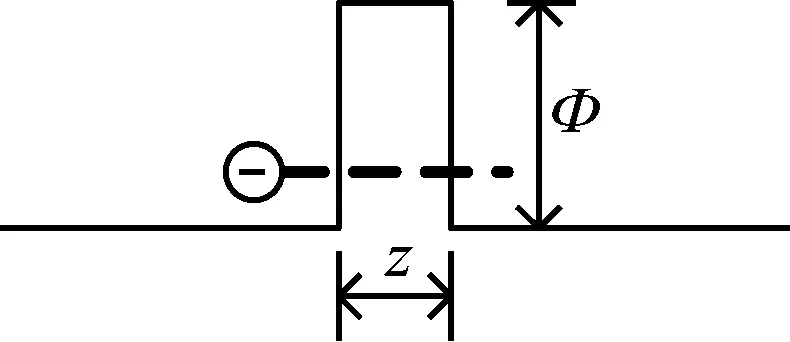
图1 电子隧道效应现象示意图Fig.1 Schematic diagram of electron tunneling effect
2 基于隧道效应纳米梁静电激励振动控制模型
以一端固定、一端自由的悬臂纳米梁为动力学模型,如图2所示。AB和CD为两个控制极板,分别对位移和速度进行控制,EF为静电驱动极板,其中,控制极板或驱动极板边界点A、B、C、D、E、F分别对应的参数坐标值为x1、x2、x3、x4、x5、x6,xi为点到悬臂梁固定端的坐标值,纳米梁与极板间的初始距离为d。在纳米梁左侧底部有一探测针,采集纳米梁振动信号。
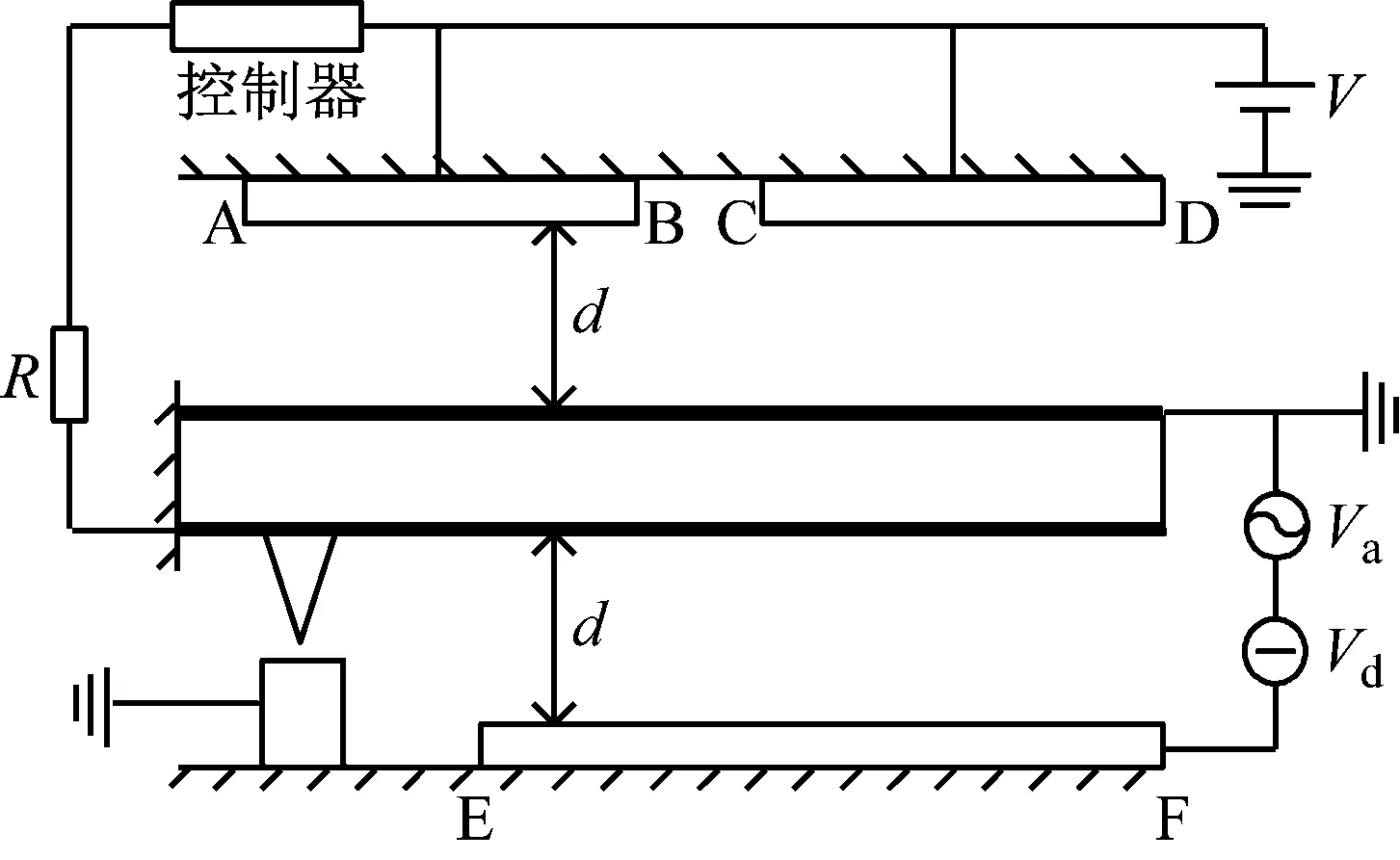
图2 纳米梁振动模型Fig.2 Vibration model of nanobeam
作用于纳米梁与静电驱动极板间的控制电压为
Ucd=Vc+Vckw(xi,t)
(2)
(3)

考虑时滞控制,则作用于纳米梁与静电控制极板间的控制电压的平方可用以下公式表示

(4)
(5)
式中:g1为控制参数。
静电控制力可表示为
(6)
式中:ε0是真空介电常数;W是纳米梁的宽度;Hij=[H(x-xi)-H(x-xj)],H(x-xi)为阶跃函数。
作用于纳米梁与静电驱动极板间的静电驱动力可表示为
(7)

在静电控制力作用下,基于隧道效应的纳米梁非线性振动微分方程可表示为
(8)
式中:()(4)=∂4/∂x4,(·)=∂/∂t,(··)=∂2/∂t2。E,I,ρ分别表示杨氏模量、截面惯性矩和纳米梁密度,c*是阻尼系数。
引入无量纲量
(9)
式中:l表示纳米梁的长度。将式(4)~(7)和(9)代入式(8)中,考虑时滞作用,得到在控制力作用下基于隧道效应的纳米梁无量纲非线性振动微分方程为
(10)

对式(10)中的1/(1-u)2、1/(1+u)2进行泰勒级数展开,本文不考虑激励电压两阶谐波对纳米梁振动的影响,假设振动系统是弱非线性系统,用小变量ε表示系统参数,得到纳米梁非线性弯曲振动方程为
2εδ1(1+2u+3u2+4u3)H56VaVdcosΩt-
εδ1(1-2u(t-τ)+3u2(t-τ)-
(11)
3 基于隧道效应的纳米梁非线性振动控制
应用多尺度法将方程(11)的近似解用以下形式进行表示[24]
u(x,t,ε)=u0(x,T0,T1)+εu1(x,T0,T1)+…
(12)
式中:ε是无量纲参数;T0=t表示快变时间尺度;T1=εt表示慢变时间尺度。
将式(12)与其对时间的导数代入式(11),令公式左右两边ε同次幂的系数相等,得到一组线性偏微分方程,即
(13)
(14)
考虑纳米梁主共振的情况,取外激励频率近似等于固有频率,则激励频率为
Ω*=ωk+εσ
(15)
式中:σ是激励频率调谐参数。
在时滞作用下,将式(13)的近似解表示成如下形式
(16)
(17)
将式(16)、(17)代入式(14),经模态正交化处理后,为避免出现久期项,要求函数A应满足
(18)

(19)
将复函数(19)及其共轭函数代入式(18),分离方程的实部与虚部,得到在时滞作用下,一次近似解的振幅ak和相位角γk满足的一阶常微分方程为

(20)

(21)

为确定纳米梁稳态振动时对应的振幅ak和相位γk,令D1ak=D1γk=0,得到振幅和相位满足的代数方程为
(22)
(23)
求得系统主共振的幅频响应方程和相频响应方程为
(24)
(25)
分析式(24)得,幅频响应方程振幅值与调谐参数、控制参数、时滞参数、激励电压和纳米梁参数等有关。
(26)
式(26)对σ求导,令∂Ek/∂σ=0,在共振频率点处下式成立
vkEk+σk=0
(27)

(28)
求得主共振的最大振幅akmax的两个解为
(29)
分析式(29)可得,主共振的峰值大小与非线性因素无关。
4 数值模拟及分析
本文以Euler Bernoulli梁一阶振动模态为例进行分析[13],纳米梁的参数值如表1所示,仿真得到系统非线性振动分析与控制的幅频响应曲线图。
图3是振动阻尼项随时滞和反馈控制增益变化曲线。由图可知,当反馈控制增益一定时,阻尼项随时滞参数呈周期性变化;当时滞参数一定时,反馈控制增益也能改变阻尼项的数值。由此可得,通过改变反馈控制增益和时滞可以改变振动阻尼项数值,扩大了振动控制的控制参数取值范围。
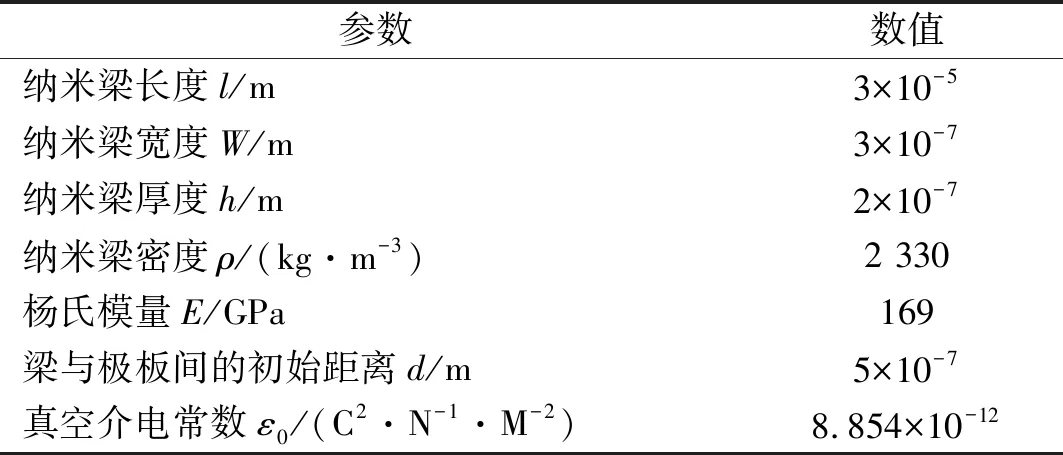
表1 纳米梁参数值Tab.1 Parameters of nanobeam
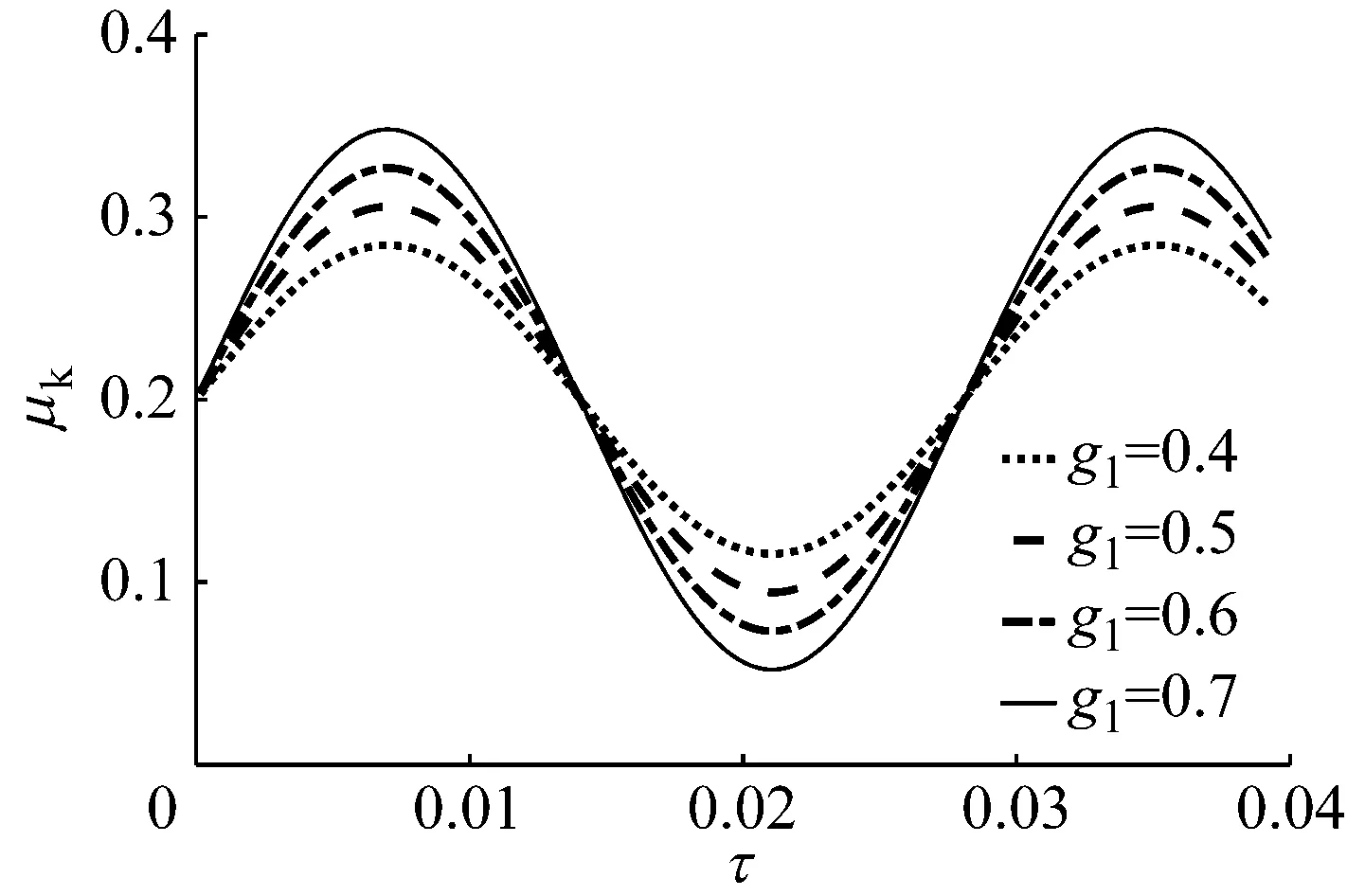
图3 控制参数不同时,振动阻尼项随时滞参数变化曲线
Fig.3 Curves of the vibration damping term varying with time-delay parameters for different control parameters
图4是时滞参数不同时,振动阻尼项随控制参数变化曲线。分析图4得,在所选取范围内,当控制参数保持一定时,时滞参数与振动阻尼项之间呈线性变化,随着控制参数的增加,振动阻尼项随之增大,保持控制参数不变,振动阻尼项幅值大小随时滞参数的增加而增大,这与图3所得结论相一致。
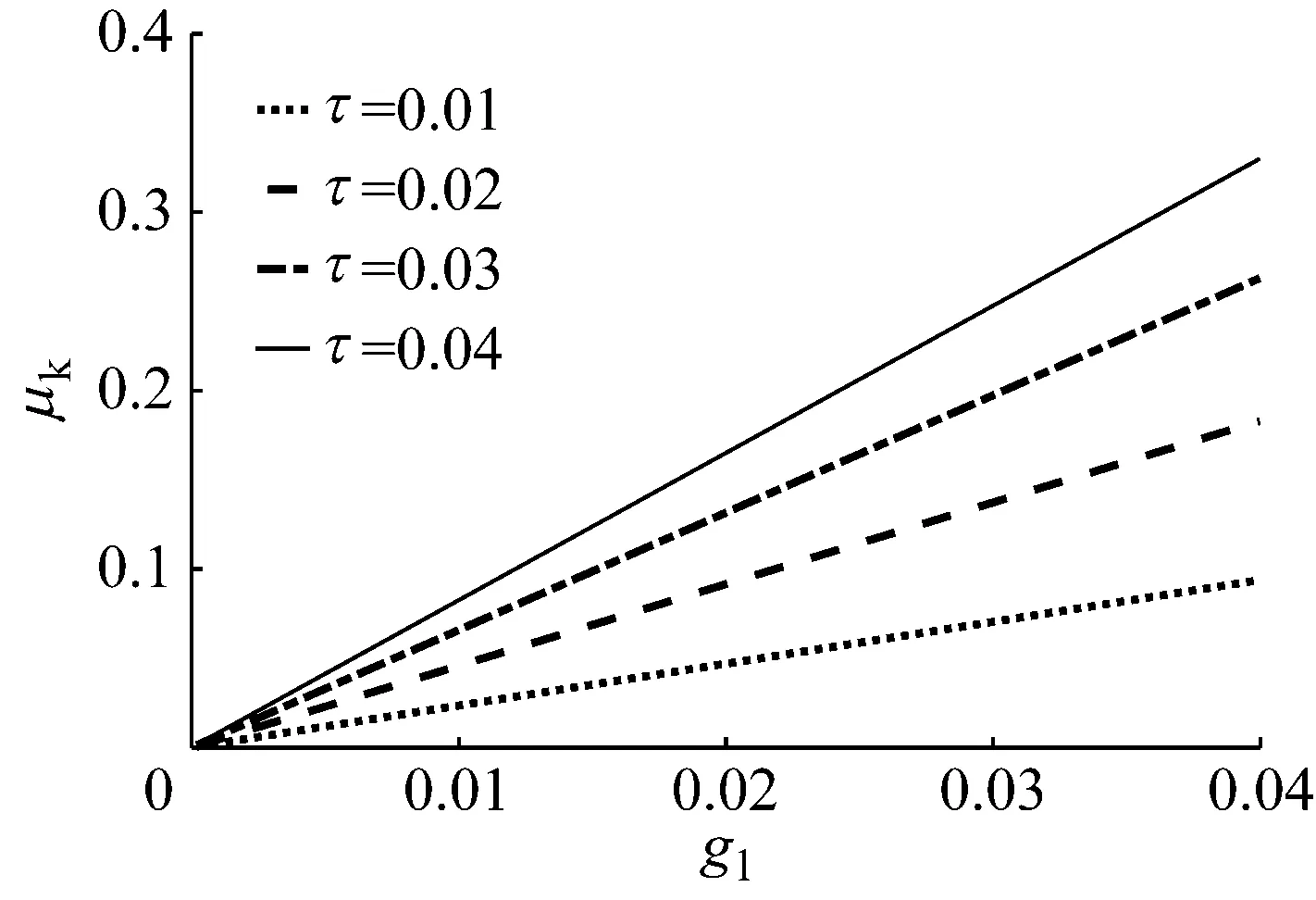
图4 时滞参数不同时,振动阻尼项随控制参数变化曲线Fig.4 Curves of the vibration damping term varying with control parameters for different time-delay parameters
图5是系统振动控制参数不同时的幅频响应曲线。分析图5可得,在时滞参数保持不变的情况下,改变系统的控制参数对振幅的大小产生一定的影响,随着控制参数的增大,系统的振幅逐渐减小。当控制参数g1的取值为0时,在共振频率点的左侧,振幅随着频率的增大而增大,在共振频率点的右侧,出现非线性区间,系统振动不稳定。当控制参数g1为0.6时,振幅峰值减小至0.30,振幅峰值点偏离共振频率点的距离减小。当控制参数g1的数值由0增加到0.6时,系统的最大振幅逐渐减小,系统振动由不稳定状态趋于稳定状态。随着控制参数幅值的增加,系统的振幅峰值点偏离共振频率点的距离逐渐减小,系统的振动逐渐趋于稳定状态。由此可得,增大系统振动时的控制参数可以减弱系统振动的非线性。
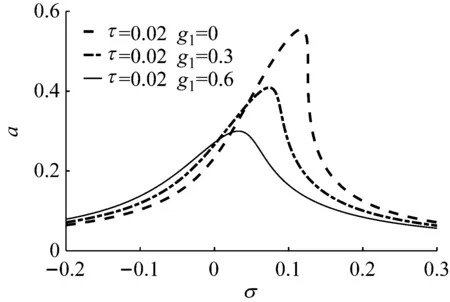
图5 控制参数不同时的幅频响应曲线Fig.5 Amplitude-frequency curves with different control parameters
图6是系统时滞参数不同时的幅频响应曲线。分析图6可得,在系统振动控制参数保持一定时,改变时滞反馈参数可以改变系统振幅的大小,振幅幅值随时滞反馈参数的增大而减小。当时滞反馈参数τ为0时,振幅峰值点向右偏离共振频率点,系统表现为非线性振动,当时滞增益参数τ由0增加到0.02时,系统的振幅峰值点向右偏离共振频率点的距离逐渐减小,系统振动的非线性明显减弱,逐渐趋于稳定状态。由此可得,选择合适的时滞参数可以明显降低系统振动的非线性。
图7是控制参数不同时,最大振幅随时滞参数变化曲线。由图7分析得,当时滞参数保持不变时,随着控制参数的增加,系统的最大振幅akmax随之减小,当控制参数保持一定时,最大振幅akmax随时滞参数的改变呈周期性变化,这与公式(29)所得结论一致。
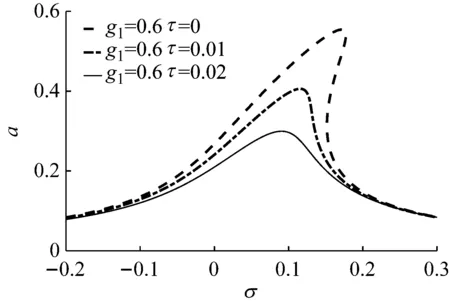
图6 时滞参数不同时的幅频响应曲线Fig.6 Amplitude-frequency curves with different time-delay parameters
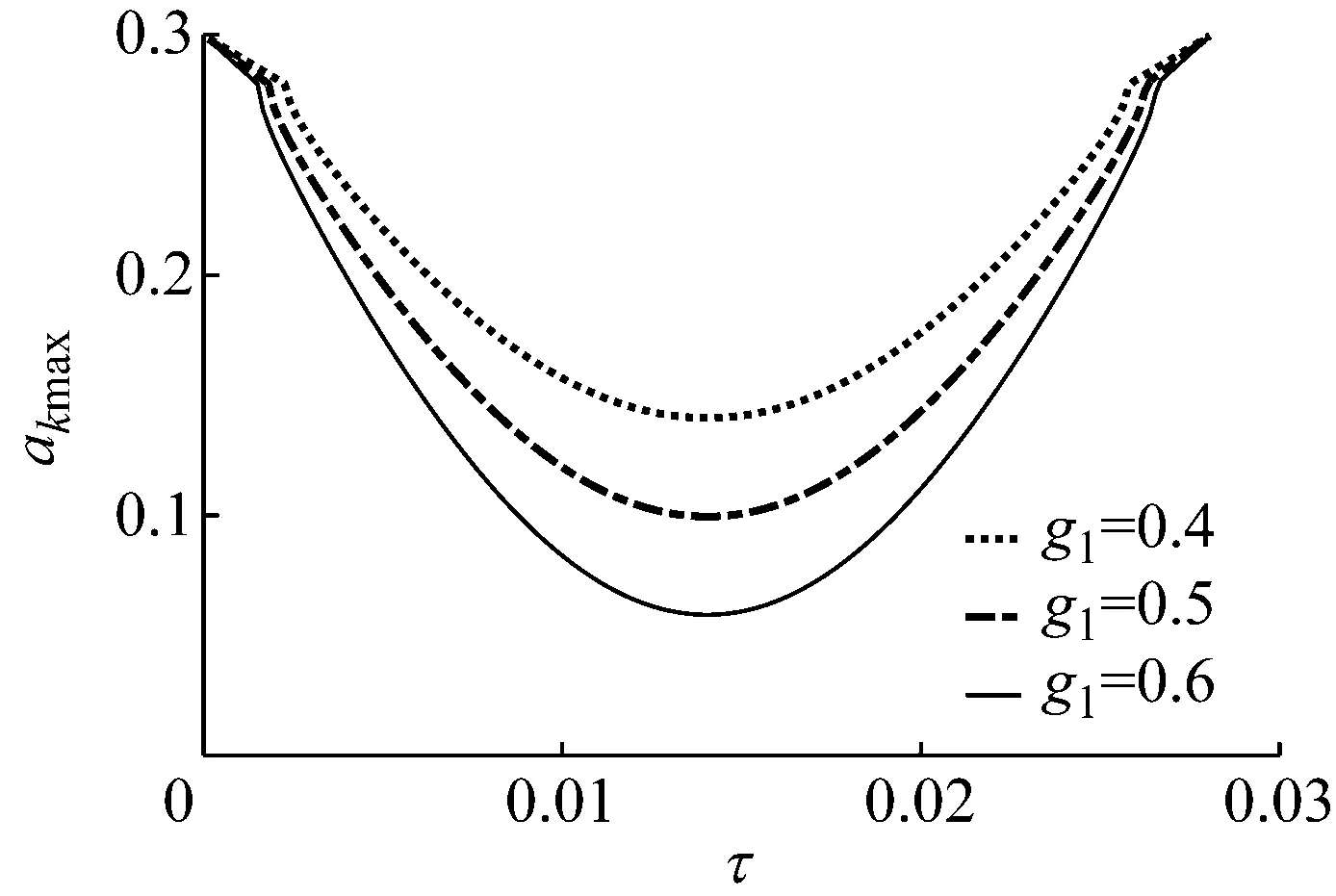
图7 控制参数不同时,最大振幅随时滞参数变化曲线Fig.7 Curves of the peak amplitude varying with time-delay parameters for different control parameters
图8是时滞参数不同时,最大振幅随控制参数变化曲线。分析图8得,当时滞参数一定时,最大振幅akmax随控制参数的增加而线性减小,当保持控制参数不变时,时滞参数越大,最大振幅akmax越小,这与公式(29)结论一致,也与图7所得结论相对应。
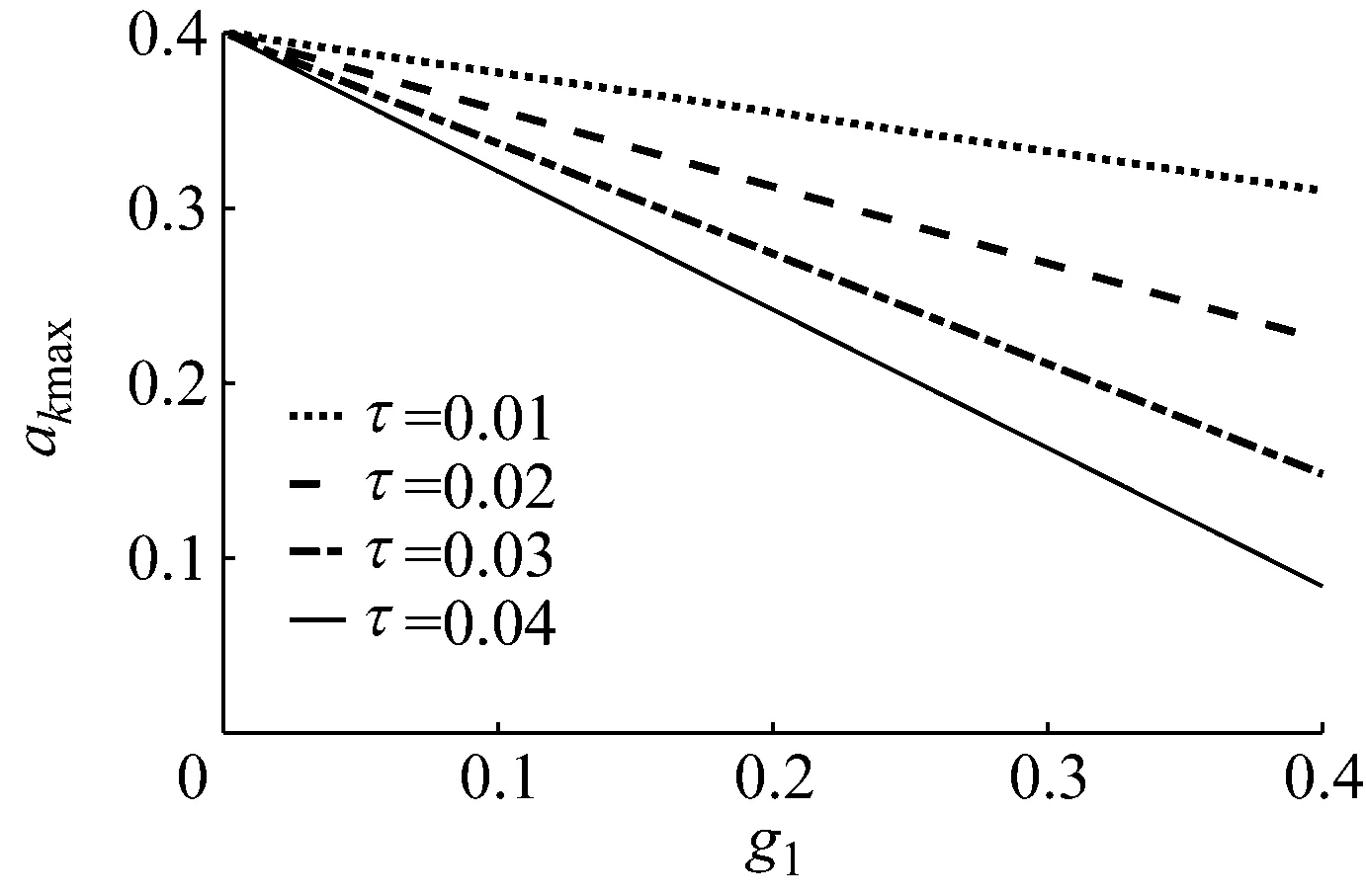
图8 时滞参数不同时,最大振幅随控制参数变化曲线Fig.8 Curves of the peak amplitude varying with control parameters for different time-delay parameters
图9是时滞参数不同时,非线性项随纳米梁长度变化曲线。非线性项是决定系统振动是否稳定的主要因素,将非线性项控制在合理的范围内有助于保证系统振动的稳定性。分析图9可得,当时滞参数一定时,非线性项νk随纳米梁长度的增加而减小,当纳米梁的长度保持一定时,时滞参数越大,非线性项νk随之增大。由此可得,通过改变纳米梁的时滞参数可以使系统振动的非线性项控制在合理范围内,从而增加系统的稳定性。

图9 时滞参数不同时,非线性项随纳米梁长度变化曲线Fig.9 Curves of the nonlinear term varying with nanobeam length for different time-delay parameters
图10是时滞参数不同时,时滞非线性项随纳米梁长度变化曲线。由图10可得,当时滞反馈参数一定时,时滞非线性项随纳米梁长度的增加而增大,当纳米梁的长度一定时,时滞非线性项ντ随时滞反馈参数的增大而增大。由此可得,选取合适的时滞参数可以实现对纳米梁非线性振动的控制。
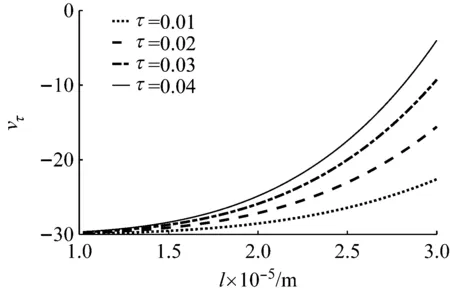
图10 时滞参数不同时,时滞非线性项随纳米梁长度变化曲线Fig.10 Curves of the time-delay nonlinear term varying with nanobeam length for different time-delay parameters
图11和图12分别是直流激励电压幅值和交流激励电压幅值不同时的幅频响应曲线。由图可知,随着直流或交流电压幅值的减小,系统振动的振幅峰值随之减小,系统的非线性减弱。当直流或交流激励电压幅值相对较大时,振幅随频率的变化呈非线性变化趋势,振动不稳定;当直流或交流电压幅值逐渐减小时,系统非线性减弱。当振动频率一定时,随着直流或交流激励电压幅值的减小,系统的振动幅度逐渐减小,衰减幅度分别为52%和48%,振幅峰值点处频率逐渐趋于共振频率,且系统振动由非线性振动趋于线性振动。由此可得,降低直流或交流激励电压幅值可以减弱甚至消除系统的非线性。
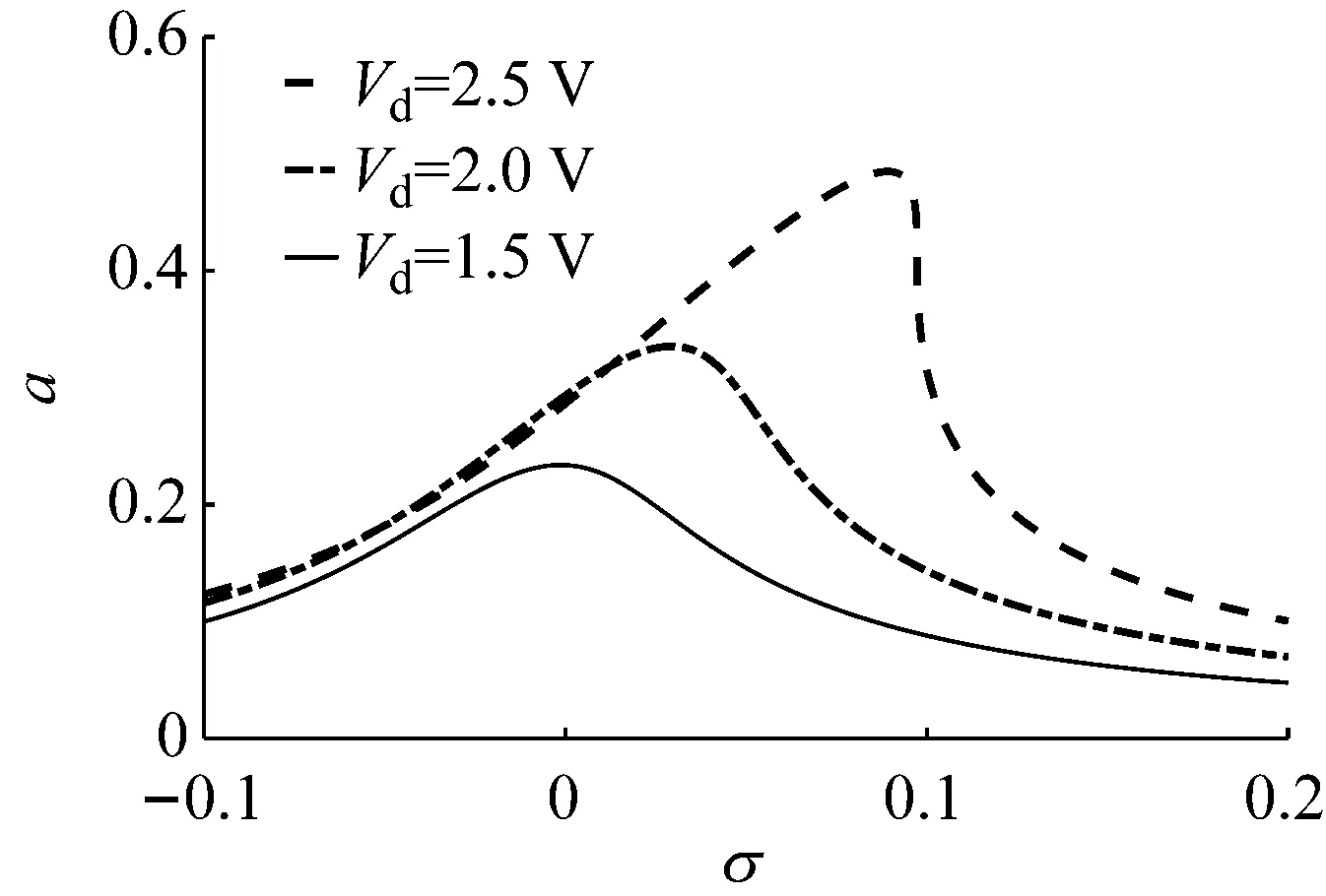
图11 直流激励电压幅值不同时的幅频响应曲线Fig.11 Amplitude-frequency curves for different amplitude of direct current excitation voltage
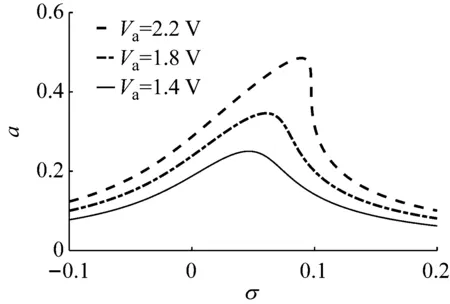
图12 交流激励电压幅值不同时的幅频响应曲线Fig.12 Amplitude-frequency curves for different amplitude of alternating current excitation voltage
为了证明本文理论分析的正确性,对本文多尺度近似解析方法和数值方法的计算结果进行对比分析。数值方法(Long Time Integration,LTI)计算结果在图中表示为不连续的离散点,多尺度方法(Method of Multiple Scales,MMS)计算结果用实线表示。时滞参数分别取τ=0和τ=0.02。由图13可知,理论分析结果与数值计算结果符合较好,两种计算结果的一致性表明本文的理论公式分析方法具有一定的合理性。
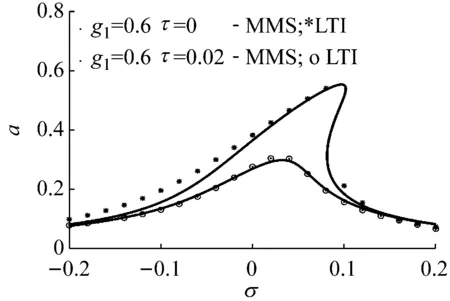
图13 多尺度方法与数值运算结果比较Fig.13 Comparison of calculation results between the method of multiple scales and the numerical integration
5 结 论
(1) 直流和交流激励电压幅值、系统振动时的控制参数都是影响系统振幅的因素,改变其中任何一个参数均对系统振动时的振幅产生较大的影响。通过适当减小直流或交流激励电压幅值、选择适当的控制参数可以减小系统的振动幅值。
(2) 选取合适的控制参数和时滞参数可以减小系统振动时的振幅,同时对振动阻尼项产生一定的影响,可以有效的对系统振动时的非线性进行控制与调节,提高系统的稳定性。
(3) 分析幅频响应曲线可得,当纳米梁各参数值保持一定时,通过适当减小直流或交流激励电压幅值、选取合适的时滞参数和控制增益可以减弱系统振动的非线性。
猜你喜欢
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年25期)2016-07-23
