
智能网联汽车仿真测试方法*
2019-05-09 06:18犹佐龙
汽车工程师 2019年4期
犹佐龙
(重庆西部汽车试验场管理有限公司)

智能网联汽车是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术的新一代汽车。由于智能汽车涉及更加复杂的功能和应用,如何测试和验证其功能和性能是亟需解决的问题[1-2]。传统的测试方法主要是道路测试和场地测试,但是都面临测试成本高、测试工况少、测试周期长等难题,在开发时间、成本、灵活性方面满足不了智能网联汽车复杂功能的开发验证需求。文章将真实驾驶员、真实传感器、真实控制器在虚拟仿真环境下深度集成,以丰富的测试手段、高度逼真的测试场景、高精度的模拟测试设备,完成覆盖智能网联汽车各开发环节的测试验证,大大缩短并降低智能网联汽车技术开发和检验检测的周期和成本[3-5]。
1 仿真测试系统架构
智能网联汽车仿真测试系统,如图1 所示,其中驾驶模拟系统模拟了真实车辆的运动,可以进行驾驶员主观评价研究;车辆模拟系统模拟了真实车辆的动力学关系,可以进行车辆的性能研究;环境模拟系统模拟了真实环境中的各类因素;传感器模拟系统模拟了真实传感器的反馈信号,使传感器能在实验室内被激活;控制器中包含了智能网联汽车不同系统的不同算法,可以在仿真环境中进行验证[6-7]。

图1 智能网联汽车仿真测试框图
2 仿真测试系统分析
2.1 车辆模拟系统
车辆动力学模型包含车体动力学模型、发动机悬置模型、转向系统模型、悬架系统模型、制动系统模型、轮胎模型、动力传动系统模型和空气动力学模型等。车辆模型在仿真测试中需要快速的计算,并将计算出的车辆响应结果发送到其它控制器中进行相应的计算和决策。为了实现快速计算,实时系统是必须要使用到的平台,如图2 所示,车辆模型在实时处理器中计算的速率延迟可控制在毫秒级;数据采集板卡包含车载CAN总线和车载Ethernet 通信板卡。车辆模型的计算数据通过通信板卡和其他设备进行通信,一方面车辆模型计算数据传递给环境模拟系统,使其中的环境随着车辆模型的运动而变化,另一方面车辆模型计算数据传递给驾驶模拟系统,使其按照车辆模型的计算情况进行相应的运动。
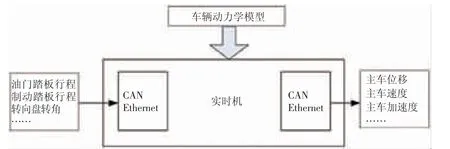
图2 智能网联汽车仿真测试车辆模型处理平台
2.2 环境模拟系统
由于车辆模型软件的功能局限,其不具备较好的环境建模能力,因此,为了给车辆模型创造较为逼真的外界环境,需要额外的软件进行环境系统的建模,如图3 所示。
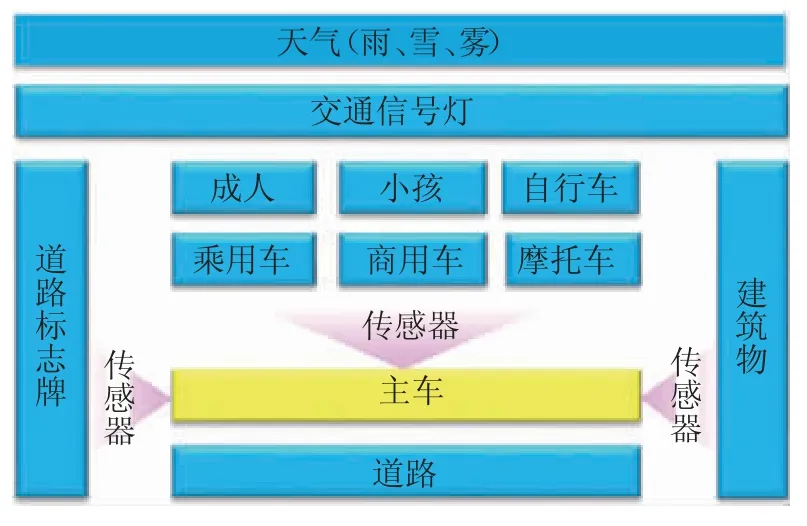
图3 智能网联汽车仿真测试环境建模系统框图
主车为车辆建模软件中的车辆模型,其与环境建模软件之间通过特定的接口进行连接,车辆模型的动力学计算部分在车辆建模软件中完成,计算后的车辆运动学姿态则通过接口传递到环境建模软件中进行显示。主车上安装有不同的传感器,包括摄像头、毫米波雷达、超声波雷达、激光雷达等,传感器的安装位置和性能参数需要与实车相匹配,以保证传感器模型识别到的目标信息可以传递到控制器中进行正确的计算。
环境模型需要稳定高效地运算各个模块,因此需要性能较高的工业电脑支持。工业电脑包含高性能图形处理显卡和高清画面显示器,高性能图形处理显卡保证了整个仿真环境的图形处理能力,高清画面显示器则为驾驶员模拟系统提供了驾驶员视角的显示画面,也为摄像头在环测试提供了仿真画面输出。环境模拟系统的处理平台,如图4 所示。
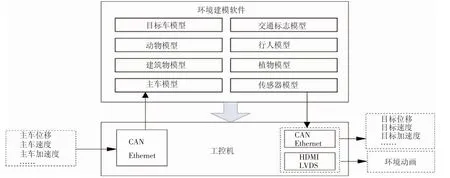
图4 智能网联汽车仿真测试环境建模系统处理平台
2.3 传感器模拟系统
对于环境建模软件中无法模拟的传感器模型或是为了进行传感器在环测试,需要利用传感器模拟系统进行真实传感器的测试。传感器模拟系统由不同真实传感器和对应的目标模拟设备组成。不同的传感器有不同的目标模拟方式,传感器模拟系统,如图5 所示。

图5 智能网联汽车仿真测试传感器模拟系统
对于毫米波雷达的目标模拟是利用毫米波雷达模拟设备接收真实雷达的发射信号,并通过一定的时延和多普勒频移处理,模拟出目标的反射回波,真实雷达接收反射回波后便可得到模拟目标的相关信息;超声波雷达、激光雷达、V2X 射频设备的目标模拟与毫米波雷达目标模拟方法类似。对于真实摄像头而言,目标模拟有2种方式:一种是将真实摄像头和显示器共同放在暗箱内,摄像头拍摄显示器,并识别显示器中的模拟目标;另一种是将环境模拟系统中的仿真视频以视频流的方式,通过视频注入板卡直接注入摄像头图像处理芯片内。对于传感器的模拟,有很多供应商提供了相应的解决方案,图6 示出Keycom 的毫米波雷达模拟系统。
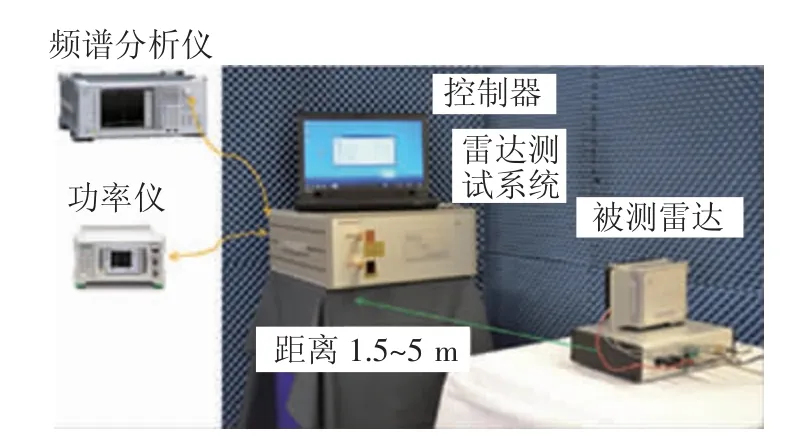
图6 Keycom 毫米波雷达模拟系统
2.4 驾驶模拟系统
为了研究驾驶员对智能网联汽车系统功能的主观评价,必须给驾驶员创造逼真的驾驶环境,因此驾驶模拟系统是必不可少的。驾驶模拟系统的结构框图,如图7 所示。
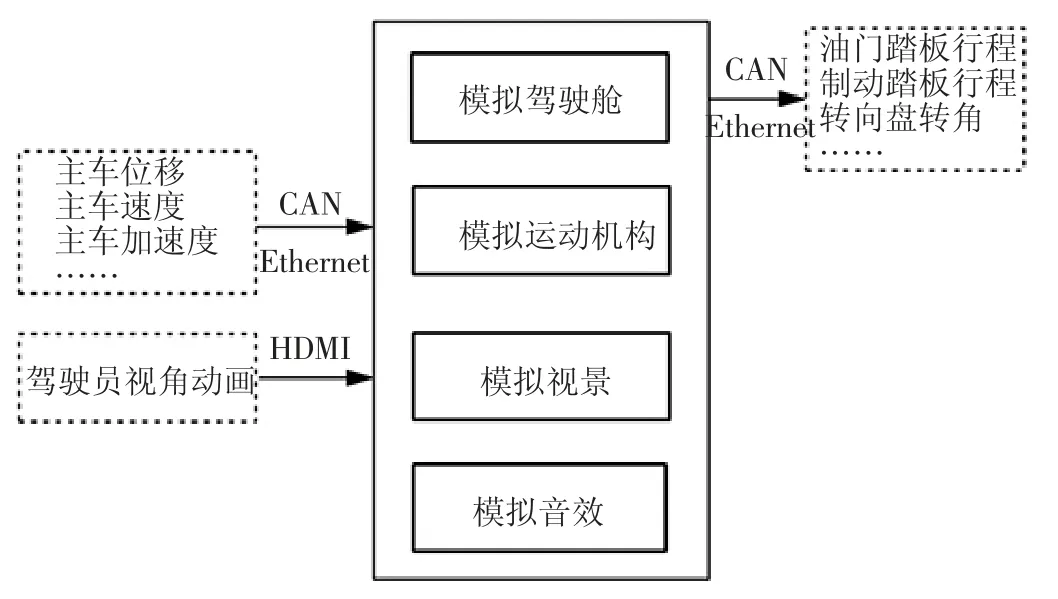
图7 驾驶模拟系统结构框图
模拟运动机构用以模拟车辆6个方向的运动情况,包括横向运动、纵向运动、垂向运动、侧倾运动、俯仰运动、横摆运动;模拟驾驶舱由转向盘、制动踏板、油门踏板、仪表盘等组成,真实驾驶员可以在模拟驾驶舱内进行驾驶;模拟视景由180°或360°环幕组成,实时显示驾驶员周围的环境变化情况;模拟音效系统模拟车辆行驶过程中的各类声音,包括发动机噪声、风噪、轮胎噪声等。驾驶模拟系统中的运动机构由车辆模拟系统中的车辆运动状态决定,车辆模拟系统中的视景及音效系统由环境模拟系统提供支持。
通过驾驶模拟系统,可以将驾驶员的主观评价提前到自动驾驶系统开发阶段,而不必等到自动驾驶汽车生产出来,大大缩短了自动驾驶系统的开发和测试周期,降低了开发成本。大型驾驶模拟系统之一的INNO 6 自由度驾驶模拟器,如图8 所示。

图8 INNO 驾驶模拟器
2.5 控制器系统
控制器系统是智能汽车的控制中心,其可以是快速原型控制器,也可以是车载真实控制器。控制器通过CAN 或Ethernet 连接各个真实传感器,并接收来自传感器的目标距离、目标速度、目标加速度等信息,经过计算后将车辆控制信号发送到车辆模拟系统中,控制信号包括加速信号、减速信号、制动信号、转向信号等。
3 仿真测试系统应用
基于以上仿真测试系统,可以进行智能网联汽车测试的应用主要分为软件在环(SIL)、硬件在环(HIL)和驾驶员在环(DIL)。
3.1 软件在环(SIL)
在智能网联汽车研发阶段,智能网联汽车的系统算法设计需要不断地进行仿真测试和优化迭代,因此可利用车辆模拟系统和环境模拟系统两部分,进行算法仿真所需的车辆模型搭建和环境模型搭建,测试智能网联汽车系统算法在纯软件仿真环境下的表现情况,特别是可以通过搭建大量的仿真测试场景,去发掘算法中的缺陷[8-10]。由于是在纯仿真环境下进行测试,因此可以将测试的计算速度加快,提升效率,缩短测试周期。
3.2 硬件在环(HIL)
硬件在环测试可将智能网联汽车的一部分或几部分硬件置于仿真测试的环境中。
对于只针对实车控制器的测试而言,可利用车辆模拟系统、环境模拟系统和控制器系统进行仿真环境的搭建,该测试方案中只有控制器是真实的,车辆模型和传感器模型都是虚拟的。
对于针对雷达、摄像头或V2X 设备的测试,则可利用车辆模拟系统、环境模拟系统、传感器模拟系统进行真实传感器的在环测试。该方案可对雷达、摄像头等传感器的物理性能进行测试和分析,还可以通过仿真环境激活真实传感器内部的功能进行功能的测试分析。
对于针对智能网联汽车执行器部件的在环测试,则可将汽车上的执行器(汽车制动系统、转向系统等)加入到仿真环境,进行功能激活和测试验证。当然,理论上汽车上的任何部件都可以加入到仿真测试环境中,甚至可以将整个车辆放入仿真环境内。
3.3 驾驶员在环(DIL)
驾驶员在环测试是将驾驶员置于仿真测试环境中,需要的仿真系统包括车辆模拟系统、环境模拟系统和驾驶模拟系统,利用此方案展开的测试包括:1)人机切换策略测试,即在人机共驾过程中,通过对切换时间、舒适性、安全性等的评价,评估人机共驾策略的合理性;2)HMI 系统设计,即配合驾驶模拟器中可配置的人机交互界面,可以在概念设计初期从声音、图像等方面对人机交互界面进行主观评价,尽早发现设计中的缺陷并完善,从而提高设计质量和效率;3)驾驶员行为分析,即利用驾驶模拟器提供的驾驶员在环系统,通过给驾驶员穿戴相关的传感设备,可以在自动驾驶的不同交通场景下对驾驶员的行为进行分析,如疲劳、注意力、心跳、压力、焦虑等;4)耐久性测试,即通过建立虚拟的道路、交通、天气等场景,对自动驾驶系统进行模拟真实道路的耐久性测试。
4 结论
通过搭建智能网联汽车仿真测试系统,为智能网联汽车的快速开发和测试验证提供了有效的方法。利用该系统,可以覆盖智能网联汽车从研发到实车测试期间的一系列测试,包括感知层测试、决策层测试、执行层测试以及人机交互和人机界面的测试,加快了智能网联汽车研发的速度,更节省了许多场地测试和道路测试的成本,对智能网联汽车的量产起到了推进作用。
猜你喜欢
中国交通信息化(2022年9期)2022-11-19
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
电子制作(2019年11期)2019-07-04
汽车观察(2018年10期)2018-11-06
山东工业技术(2017年3期)2017-03-16
北京教育·高教版(2016年9期)2016-11-05
互联网天地(2016年1期)2016-05-04
中学科技(2015年11期)2015-11-25
