
基于扩展Kalman滤波器组的ECAS系统传感器故障诊断*
2019-05-09 10:10单海强崔晓利
振动、测试与诊断 2019年2期
陈 龙, 单海强, 徐 兴, 崔晓利
(1.江苏大学汽车与交通工程学院 镇江,212013) (2.湖南工学院机械工程学院 衡阳,421002)
引 言
目前,针对电控空气悬架(ECAS)系统的研究主要集中于通过优化控制方法来改善行驶平顺性、车高调节的有效性和操作稳定性[1-4]。但是,以上研究均需以传感器正常工作为前提。实际上,作为ECAS系统的重要部件,由于传感器长期工作在恶劣条件下很容易发生故障,导致ECAS系统控制效果变差甚至误控制。
故障诊断技术是提高系统运行可靠性及可维修性的重要方法,在各种行业的控制系统中得到了广泛应用[5-8]。
在汽车悬架系统中,故障诊断技术的主要应用如下。Chamseddine[9-10]等针对发生完全损坏故障的传感器进行了检测与隔离研究,同时采用滑模控制技术针对液压主动悬架的传感器故障设计了容错控制器。Fischer等[11]通过设计观测器来获得系统输出残差,并对残差进行征状分类从而实现故障传感器的检测隔离。杨柳青等[12-14]通过设计故障检测滤波器、自适应观测器以及鲁棒观测器等方法实现汽车液压主动悬架的作动器及传感器故障诊断。高振刚等[15]基于故障诊断观测器提出了电磁阀式半主动悬架作动器在线故障估计方法,在有效估计作动器故障幅值的基础上实现了容错控制。Kim等[16]采用基于模型的故障诊断方法,针对闭式空气悬架系统的压力传感器和高度传感器设计了故障自动防护算法。然而以上研究主要针对悬架的线性模型进行故障诊断研究,所采用的方法无法直接应用到具有强非线性的ECAS系统中。
文献[17-19]建立了1/4车ECAS单质量系统非线性模型,该模型仅考虑簧上质量运动,通过将簧下质量运动与路面激励合并视为干扰简化了ECAS系统模型。基于气体热力学原理和车辆动力学理论,同时考虑簧上与簧下质量运动,笔者将道路激励视为扰动,针对气路开式电控空气悬架系统建立1/4 ECAS双质量系统非线性模型,通过基于扩展卡尔曼滤波器组的故障诊断策略实现ECAS系统故障传感器的检测和隔离。
1 系统建模
1.1 1/4车ECAS系统建模
图1为1/4车气路开式ECAS系统总体结构,主要元件有:传感器、空压机、高压罐、充放气电磁阀和车高控制器等。高度、加速度以及气压传感器分别安装在特定的测量位置。

1-车高控制器; 2-加速度传感器; 3-高度传感器; 4-气压传感器; 5-空气弹簧; 6-减振器; 7-空气弹簧电磁阀; 8-单向阀; 9-充气电磁阀; 10-储气罐; 11-空压机; 12-放气电磁阀 图1 1/4 ECAS系统模型Fig.1 ECAS system model of quarter vehicle
依据车辆动力学理论,簧上与簧下质量的运动学方程为

(1)
其中:ms,mu为簧上和簧下质量;xs,xu为簧上和簧下质量绝对位移;Pa为标准大气压;P1为空气弹簧内绝对气压;g为重力加速度;C0为减振器阻尼系数;Ae为空气弹簧有效面积;kt为轮胎刚度;q为道路激励。
作为ECAS系统的主要元件,空气弹簧内部的气体质量变化遵循热力学定律[20]。电磁阀打开时,空气弹簧充放气模型为
(2)
其中:κ为空气绝热系数;R为气体常量;T1为空气弹簧内部温度;m1为空气弹簧充放气过程中的气体质量;V1为空气弹簧容积。
(3)
根据式(2),(3),可以推导出完整的空气弹簧充放气模型
(4)
其中:ΔV为空气弹簧容积变化率;qm为空气弹簧充放气时气体质量流量。
车身高度变化过程中,空气弹簧容积会发生突变,其模型建立如下
V1=V0+ΔV(xs-xu)
(5)
其中:V0为空气弹簧初始容积。
通过滤波白噪声法建立路面模型为
(6)
其中:f0为下限截止频率;q为路面垂向位移;u为行驶速度;w(t)为白噪声;Gq(n0)为路面功率谱密度值;n0为参考空间频率。
联立式(1)、式(4)、式(5)和式(6)可得1/4车ECAS系统数学模型(单组空气弹簧)为
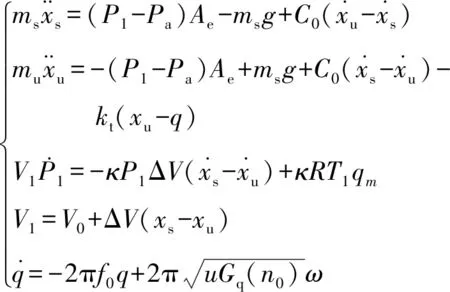
(7)


(8)
其中:
1.2 传感器故障建模
传感器常见故障分为恒偏差、恒增益变化和卡死[21]。文中只考虑同一时刻仅存在一个故障传感器的情况。当第i个传感器出现故障时,与之对应的量测输出方程为
yif=λiyi+ni
(9)
其中:yif和yi分别为第i个传感器有故障输出和无故障输出;λi为第i个传感器恒增益故障系数;ni为第i个传感器恒偏差值或卡死值;i=1,2,3分别代表高度、车身加速度和气压3个传感器。
传感器故障发生时,ECAS系统输出为
(10)
其中:F=[F1F2F3]T为故障系数矩阵;F1=[1 0 0],F2=[0 1 0],F3=[0 0 1]分别为高度、车身加速度、空气弹簧压力传感器故障矩阵;f=[f1f2f3]T为传感器故障值矩阵;fi=(λi-1)yi+ni为第i个传感器故障值。
2 故障检测与隔离策略
ECAS系统控制器根据传感器采集的多路信息,通过控制高速开关电磁阀的占空比来调节空气弹簧内部的气体质量。但是当传感器出现故障时,控制器将无法正常调节空气弹簧的充放气过程。故障检测与隔离(fault detection and isolation,简称FDI)策略如图2所示。

图2 ECAS系统传感器故障检测与隔离(FDI)策略Fig.2 Fault detection and isolation (FDI) strategy of sensors for ECAS system
从图2可知,3次测量输出值由传感器测量获得,分别以3次测量输出yi与控制器发出的控制信号u作为滤波器输入,设计扩展卡尔曼滤波器,并构成扩展卡尔曼滤波器组,滤波器组中各滤波器独立对ECAS系统状态变量进行估计。由此获得检测和隔离指标值,根据指标值与自适应检测阈值的比较结果来实现故障传感器的检测与隔离。
2.1 故障检测方法
(11)

由式(11)计算获得的初级残差具有一般性,对于1/4 ECAS系统,其特性如表1所述。

表1 初级残差特性描述

(12)
将故障检测指标值rindex与自适应阈值h进行比较,便可检测出传感器是否发生故障。
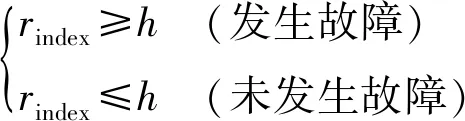
(13)
根据式(13)可知,当故障检测指标值大于或等于检测阈值时表明传感器发生故障;当检测指标值小于检测阈值时表明传感器未出现故障。
2.2 故障隔离方法
当检测出ECAS系统存在故障传感器后,需要进一步隔离故障传感器,由故障检测指标值计算获得的隔离指标值如下
(14)
其中:ηa为故障隔离指标值(a=1~3)。
如表2所示,ECAS系统传感器故障隔离策略为:当3个传感器均未发生故障时,由于各组滤波器对状态变量的估计近似一致,因此检测和隔离指标值均极小且稳定在零值附近。当某一传感器发生故障时,与该故障传感器对应的滤波器获得的状态估计值将发生异常变化,而此时与正常传感器对应的其他滤波器输出的状态估计保持正常,因此与故障传感器相关的隔离指标值迅速增大最终超过检测阈值,从而达到隔离故障传感器的目的。

表2 故障隔离指标特性描述
3 系统仿真分析
3.1 扩展卡尔曼滤波器设计
根据式(8)所示系统状态方程和输出方程,设计滤波器方程为
(15)

扩展卡尔曼滤波(extended Kalman filter,简称EKF)算法被广泛应用于非线性系统中进行状态估计,其主要思想是采用泰勒公式将非线性模型化成线性模型再进行卡尔曼滤波。算法流程如图3所示。
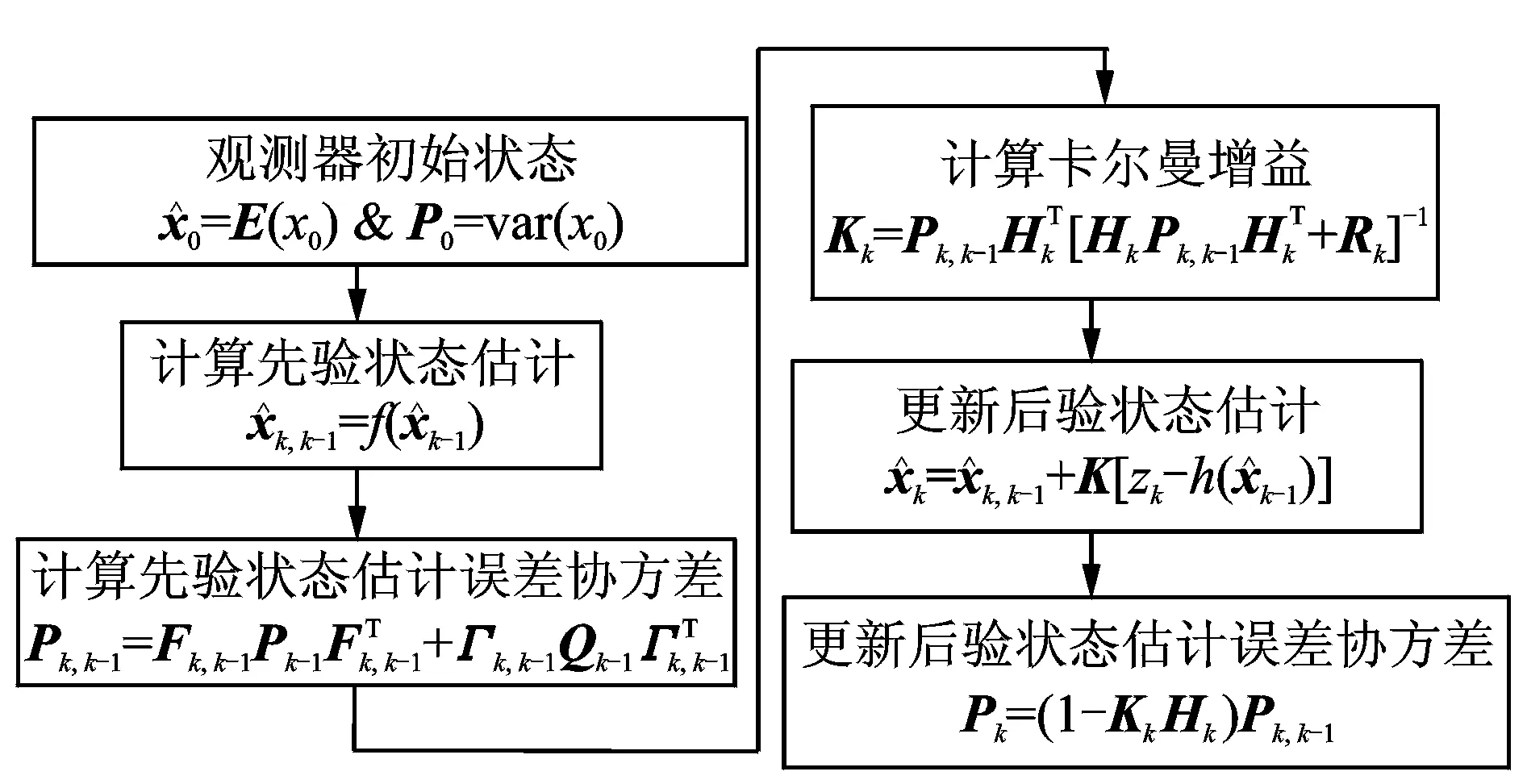
图3 EKF算法流程Fig.3 Flowchart of EKF algorithm
3.2 故障诊断结果分析
采用AMESim搭建1/4ECAS系统物理模型,在Matlab/Simulink中搭建路面激励和传感器故障的数学模型,并编写滤波器程序。在AMESim中搭建的物理模型如图4所示。该模型与Simulink联合仿真,向Simulink发送空气弹簧气体质量流量m,簧上和簧下质量M的位移X,空气弹簧气压值P,簧上质量加速度A信号,并从Simulink模型中获得道路激励信号与电磁阀控制信号。

图4 AMESim中物理模型Fig.4 Physical model in AMESim
综合上述3种故障类型,文中选取如表3所示的4种故障行为验证所提出的故障检测与隔离方案,故障发生时间为第2 s。

表3 故障行为描述
3.2.1 故障检测结果分析
由图5可知,传感器i发生故障前,3个故障检测指标值均小于检测阈值,2 s后与故障传感器相关的两个检测指标值迅速增大,并在短时间内超过阈值,另一检测指标值仍保持极小,故障得到检测。

图5 故障检测指标值Fig.5 Fault detection index value
3.2.2 故障隔离结果分析
由图6可见,故障传感器未出现之前,故障隔离指标值均低于检测阈值。故障传感器出现后,与其相关的隔离指标值不断增大并最终超过检测阈值,其余隔离指标值仍然小于检测阈值,故障得到隔离。
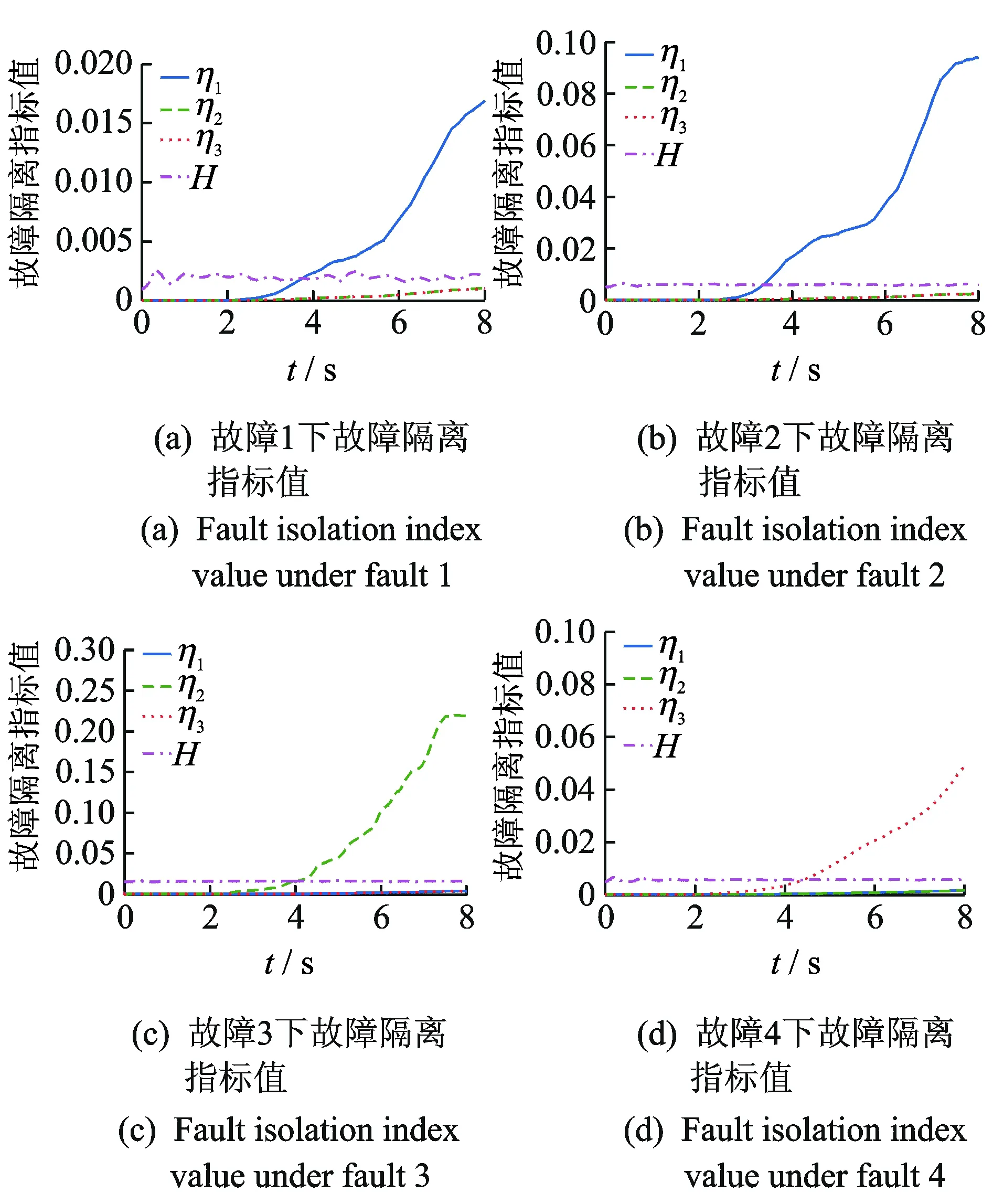
图6 故障隔离指标值Fig.6 Fault isolation index value
4 试验与结果分析
为进一步验证笔者所设计的故障诊断方法的有效性,在1/4ECAS台架上进行试验。台架组成部件包括:单根空气弹簧、传感器测试系统、数据采集系统和激振台。测试台架如图7所示。

1-气体压力传感器; 2-管路; 3-高度与加速度传感器; 4-INSTRON8800台架图7 1/4 ECAS台架Fig.7 Test bench of 1/4 ECAS system
4.1 试验方案
激振台模拟真实道路激励,通过对单根空气弹簧进行充放气来调节1/4 ECAS系统车身高度,具体步骤为:a.将车身高度抬升到高位;b.将车身高度降落到低位。传感器将车身高度、加速度等信息输入到数据采集系统进行仿真。
4.2 试验结果分析
采样时间间隔设定为0.004 s。选取如表3所示的4种故障行为验证扩展卡尔曼滤波器组的效果。
4.2.1 故障检测结果分析
试验所得故障检测指标值曲线如图8所示,由图可知,故障发生前,检测指标值非常小且均未大于检测阈值。故障传感器出现后,与其相关的故障检测指标值迅速超过检测阈值。故障检测方法得以实验验证。

图8 故障检测指标值Fig.8 Fault detection index value
4.2.2 故障隔离结果分析
试验所得故障隔离指标值曲线如图9所示,传感器故障发生前,隔离指标值极小且均小于阈值。当出现故障传感器后,与其相关的隔离指标值迅速增大且超过检测阈值。故障隔离方法得以试验验证。
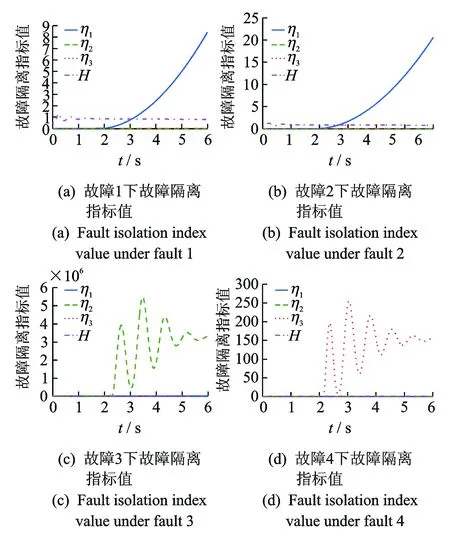
图9 故障隔离指标值Fig.9 Fault isolation index value
5 结束语
为了精确描述空气弹簧充放气特性及ECAS系统的非线性,采用AMESim搭建1/4ECAS系统双质量模型,采用Matlab建立传感器故障模型及扩展卡尔曼滤波器组,建立的联合仿真模型适用于采用膜式空气弹簧的气路开式ECAS系统,对于气路闭式ECAS系统或用其他形式空气弹簧的空气悬架系统并不完全适用。系统台架试验表明:采用扩展卡尔曼滤波器组设计的故障诊断方案可以准确快速检测及隔离传感器故障,从而实现ECAS系统传感器故障的有效诊断。相比于线性系统成熟的故障诊断方法,非线性系统故障诊断还处于发展中,ECAS系统作为非线性系统,其故障诊断属于非线性系统故障诊断问题,基于扩展卡尔曼滤波器组的传感器故障诊断方法可以解决这一非线性系统的故障诊断问题,为相关非线性系统故障诊断研究提供了参考。
猜你喜欢
模具制造(2022年1期)2022-02-23
一重技术(2021年5期)2022-01-18
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
经营者(2019年19期)2019-11-30
电子制作(2018年10期)2018-08-04
进出口经理人(2017年5期)2017-07-07
新高考·高一物理(2016年10期)2017-07-07
兵器装备工程学报(2017年4期)2017-04-28
北京航空航天大学学报(2016年6期)2016-11-16
汽车电器(2014年5期)2014-02-28
