
不确定非线性离散系统的保成本控制
2019-06-03 03:39樊丽颖宋婧婧张佳宁洪港
哈尔滨理工大学学报 2019年2期
樊丽颖 宋婧婧 张佳宁 洪港


摘 要:研究了一类带有状态和输入延迟的范数有界的不确定非线性离散系统的保成本控制问题。应用Lyapunov稳定性理论和线性矩阵不等式方法,提出了状态反馈控制器存在的充分条件,同时设计的控制器能够确保系统对于所允许的不确定性是渐近稳定的且性能指标不会超过某一给定的上界,因此保成本问题解决。最后通过仿真算例,验证了所提方法的有效性。
关键词:保成本控制;不确定非线性系统;离散系统;线性矩阵不等式
DOI:10.15938/j.jhust.2019.02.018
中图分类号: O23
文献标志码: A
文章编号: 1007-2683(2019)02-0121-06
Abstract:In this paper, the problem of guaranteed cost control for a class of uncertain nonlinear discrete systems with state and input delay is studied. By applying Lyapunov stability theory and linear matrix inequality approach, sufficient conditions for the existence of state feedback controller are obtained to guarantee that the asymptotical stability of the close loop system and the quadratic performance index less a certain bound for all admissible uncertainties,t herefore, guaranteed cost problem solving. Finally, the effectiveness of the proposed method can be illustrated by the simulation example.
Keywords:guaranteed cost control;uncertain nonlinear systems;discrete systems;linear matrix inequality
收稿日期: 2017-07-25
基金项目: 黑龙江省教育厅科学技术研究项目(12541161).
作者简介:
宋婧婧(1992—),女,硕士研究生;
张佳宁(1992—),女,硕士研究生.
通信作者:
樊丽颖(1977—),女,博士,副教授,Email: fan_liying@163.com.
0 引 言
保成本控制问题是近些年来研究的一个热点问题,在实际控制中,不仅要考虑系统的稳定性,而且需要考虑到系统的一些性能指标,常见的线性二次型性能指标在一定程度上就反映出了系统的动态特性。众所周知,不确定性出现在许多动态系统中,而且也是引起系统不稳定或性能下降的原因之一,因此,非线性不确定系统的保成本控制问题受到了广泛关注。鲁棒保成本控制方法最早是由Chang和Peng在1972年提出的[5],其基本思想就是当系统存在的不确定性在给定的范围内,要设计的控制器能够使得闭环系统是鲁棒稳定的,同时满足某种鲁
棒性能,这一性质决定了鲁棒保成本控制在实际工程中具有重要的实际意义。基于此方法,关于离散系统的情况得到了一些重要成果。最近,这些成果又被扩展到不确定非线性离散系统中。
本文研究参数不确定控制系统的鲁棒保成本控制问题,应用稳定性理论和线性矩阵不等式方法,提出了状态反馈保成本控制器的设计方法,确保系统对于所允许的不确定性是渐近稳定的且性能指标小于给定的上界,同时提出了保成本控制器的设计方法。
符号:文中M>(≥,<,≤)0代表一个对称正定(半正定、负定、半负定)矩阵。在一个矩阵中“*”代表对称的部分,“T”代表矩阵的转置,I代表单位矩阵。
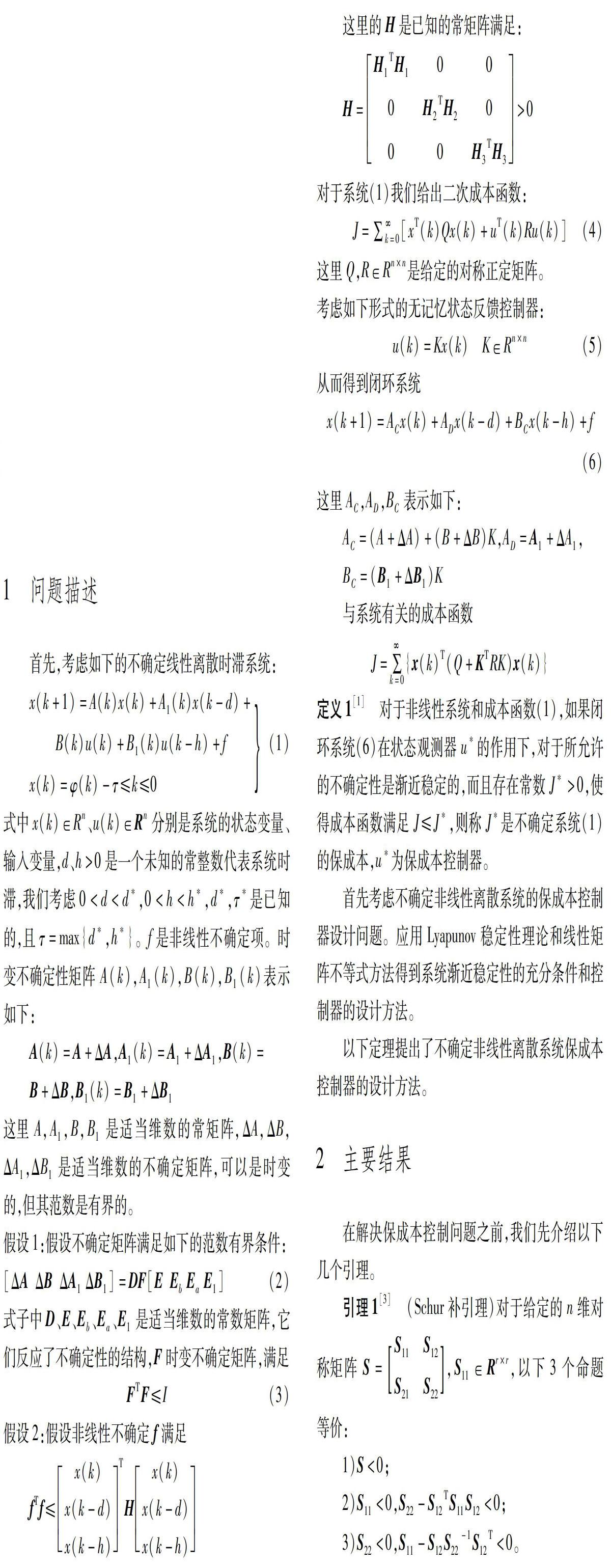
定义1[1] 对于非线性系统和成本函数(1),如果闭环系统(6)在状态观测器u*的作用下,对于所允许的不确定性是渐近稳定的,而且存在常数J*>0,使得成本函数满足J≤J*,则称J*是不确定系统(1)的保成本,u*为保成本控制器。
首先考虑不确定非线性离散系统的保成本控制器设计问题。应用Lyapunov稳定性理论和线性矩阵不等式方法得到系统渐近稳定性的充分条件和控制器的设计方法。
以下定理提出了不确定非线性离散系统保成本控制器的设计方法。
2 主要结果
在解决保成本控制问题之前,我们先介绍以下几个引理。
下列定理给出状态反馈保成本控制器存在的充分条件。
下面通过仿真来验证保成本控制器设计的有效性。
3 仿真算例
下面通过数值仿真算例来验证前面所得出的鲁棒保成本控制器设计方法的有效性。
4 结 论
本文研究了不确定非线性离散系统的保成本问题,基于Lyapunov稳定性理论和线性矩阵不等式方法,提出了保成本控制器设计的方法,同时设计的控制器不僅能够使得闭环系统稳定且性能指标不会超过某一给定的上界,最后给出了仿真算例,验证了所提方法的有效性。
参 考 文 献:
[1] FAN Liying,WU Junfeng,LI jingxiang,et al. Guaranteed Cost Sampleddata Control:An input delay approach[C]// The 6th International Forum Strategic Technology.Harbin,China,August 22-24,2011,2:1045.
[2] 樊丽颖,武俊峰.不确定系统的变采样控制[J].电机与控制学报,2011,15(11):90.
[3] 梅生伟,申铁龙,刘康志.现代鲁棒控制理论与应用[D].北京:清华大学出版社,2003.
[4] 曹艳秋.执行器饱和不确定离散控制系统的稳定性分析[D].哈尔滨:哈尔滨理工大学, 2012.
[5] YU L,GAO F, XUE A. Guaranteed Cost Control of Discrete Linear Timedelay Systems[C]// Proc.of the American Control Conference,Chicago,Illinois,June,2000:
2481.
[6] PETERSEN I R. Optimal Quadratic Guranteed Cost Control of A Class of Uncertain Timedelay Systems[J].IEE Proc,Control theory Appl,1997,144(2):183.
[7] HORM A R, JOHNSON A C. Matrix Analysis[D].New York:Cambridge Univ.Press,1985:230.
[8] HAO Ningmei, ZHANG Yong. Guaranteed Cost Control for a Class Uncertain Nonlinear Systems with Timedelay[J]. Science Technology and engineering,2011,8(11):1728.
[9] 关新平,张群亮.广义区间系统的弹性保成本控制[J].电机与控制学报,2002,6(1):84.
[10]黄剑,关治洪,王仲东.不确定离散脉冲系统的保成本控制研究[J].华中科技大学学报(自然科学版), 2006, 34(2):84.
[11]张颖,段广仁.不确定离散切换系统具有极点约束的保性能控制[J].控制与决策,2007,2(11):1269.
[12]顾则全,刘贺平,廖福成等.基于LMI的不确定时滞切换广义系统的保成本控制[J].系统工程与电子技术,2010,(1):147.
[13]李阳.基于LMI的不确定离散多时滞系统保成本控制[J].辽宁石油化工大学学报,2012,(4):83.
[14]吴建成,沃松林.非线性时滞广义系统的非脆弱保成本控制和H∞控制[J].南京理工大学学报(自然科学版),2011,(1):26.
[15]陈芳信,伍良坤.不确定离散时滞系统的保成本控制[J].空军雷达学院学报,2011,(1):50.
[16]王刻奇,杨智.不确定离散时滞系统的时滞相关保性能控制[J].信息与控制,2010,(3):373.
[17]姚华利,孙洪飞.不确定非线性系统的鲁棒H∞保性能控制[J].厦门大学学报(自然科学版),2012,(6):974.
[18]梁新民.一类不确定非线性时滞系统的鲁棒控制问题研究[D].哈尔滨:哈爾滨工业大学, 2010.
[19]李阳,杜莹,王立智.基于LMI的一类不确定多时滞非线性饱和系统的稳定性判据[J]. 西南师范大学学报(自然科学版), 2015(4):31.
[20]李阳.多时滞不确定离散系统稳定性的凸优化算法[J].科学技术与工程,2013, 13(20):5825.
[21]陈跃鹏,张庆灵,翟丁等.广义系统可靠保成本控制[J].东北大学学报(自然科学版), 2004, 25(5):471.
[22]仇翔,腾游,QIUXiang等.离散时滞系统的网络化保成本控制[J].浙江工业大学学报, 2014, 42(4):400.
[23]王建英.一类不确定离散时滞系统的二次保成本控制[J].集宁师范学院学报,2010, 32(4):75.
[24]CHANG S, PENG T. Adaptive Guaranteed Cost Control of Systems with Uncertain Parameters[J]// IEEE Trans.Control,1972,17(4):474.
(编辑:关 毅)
