
利用解耦光流运动场模型的双目视觉里程计位姿优化方法
2019-06-10 02:41郝金明
测绘学报 2019年4期
乌 萌,郝金明,付 浩,高 扬,张 辉
1. 信息工程大学地理空间信息学院,河南 郑州 450052; 2. 地理信息工程国家重点实验室,陕西 西安 710054; 3. 西安测绘研究所,陕西 西安 710054; 4. 国防科技大学智能科学学院,湖南 长沙 410073; 5. 国防大学联合作战学院,河北 石家庄 050001
近年来,伴随着传感器与硬件平台性能的提升、计算机视觉与机器学习理论的发展、同时定位与建图(simultaneously localization and mapping,SLAM)与运动恢复结构(structure from motion,SFM)技术的迅速普及,地面移动测量系统(mobile mapping system,MMS)与无人驾驶车(autonomous vehicle,AV,或称自主驾驶车)两个行业已然走向了深层次的相互借鉴、融合与进步[1-6]。目前的两个平台的主要区别仅在于驾驶控制方式与应用目的的不同,平台安装的传感器件、采用的载体定位定姿、高精度地图建立等核心关键技术几乎是一致的[7-10]。从长期发展来看,MMS的未来必将是无人化、互联化甚至实时化的地面移动测量,而AV的发展也将走向实时高精度地图建立、自主决策控制、车联网云端导航等方向。在不远的将来,MMS与AV平台将可能融合成为一个集实时测图、上传云端实时建图、更新互联发布、实时导航的有机平台。
当前,多传感器融合获取载体精确的位置姿态仍是MMS与AV两个系统共同的基础核心关键问题[7-8,10],其中视觉传感器的位置姿态确定离不开视觉里程计(visual odometry,VO)技术。VO技术作为视觉SLAM(visual-SLAM,VSLAM)的前端技术内容,近年来发展迅速。VO主要分为单目(monocular VO)与双目(stereo VO)两类,分别是指通过单目或双目相机作为输入估计载体自身运动位置姿态变化的过程[11]。单目VO由于只能恢复运动到一个尺度因子,而绝对尺度需要利用场景中目标大小、运动约束或集成其他传感器来确定,因此其序列图像定位定姿跟踪的稳定性较差。双目VO能够直接利用基线获得尺度、深度,因此其序列图像位姿估计精度和稳定性都显著优于单目[12]。但是,目前VO、VSLAM算法精度和稳健性与视觉、POS、LiDAR多传感器融合后的组合导航结果相比,精度约低一个数量级,稳健性也显著低于组合系统,主要用于低成本轻量化平台的位姿估计、组合系统的位姿初值获取以及与LiDAR融合实现环境地图生成。
目前VO的典型方法有基于特征法的ORB-SLAM[13]、基于半直接法的SVO[14],以及基于直接法(或称光流法)的多种方法。直接法依利用光流数量的多少还可分为稠密法(如REMODE[15]、DTAM[16])、半稠密法(如LSD-SLAM[17])、稀疏法(如DSO[18])等,适用于不同计算平台和建图应用需求。其中稀疏法一般用于需要实时高效位姿估计的场合,大多数稀疏算法是将六自由度的位置姿态在同一重投影误差最小化过程中整体估计出来[19-20],或是以一定合理假设为前提限定载体部分姿态变化而后估计其他位姿参数,相比六自由度整体估计的方法计算效率更高但因载体姿态的限定而精度略有损失[21-22]。RotROCC法[23]提出首先抵消旋转分量,仅保留平移分量,实现平移分量解耦,然后利用解耦归一化重投影残差,实现仅利用平移分量进行位置变化估计中的外点剔除,从而实现载体位姿估计的优化,但其利用的模型存在近似,因此无法分离平移和深度误差,也就无法利用旋转分量进行姿态变化估计中的外点剔除。本文针对MMS和AV车辆平台下双目相机拍摄的图像序列中视觉里程计位姿估计优化问题,在RotROCC法的基础上,利用光流运动场模型中载体位姿与图像光流矢量间关系,不仅将光流矢量解耦为平移、旋转分量,并进一步解耦为3个平移分量、3个旋转分量和深度分量,充分推导分析了解耦后单个分量、组合分量误差对位姿估计的影响,分别利用仿真和真实数据试验,验证了不同模型下的误差分离方法。最后,结合组合分量的误差分离模型,针对双目VO序列位姿估计提出了解耦光流运动场的位姿优化算法,并在公开的KITTI数据集[24]中进行了多个序列真实数据验证。
1 光流运动场模型及解耦
1.1 光流运动场
当相机与场景间有相对运动时,图像上亮度的运动变化就称为光流[25],因此,图像中光流的运动规律直接反映了与相机固联的载体的位置姿态变化,这一模型可以通过式(1)描述[26-27],下称光流运动场模型

(1)


图1 光流运动场投影模型图像平面Fig.1 Projection model of flow motion field
1.2 解耦光流分量
图像中的光流运动场展现的是前后帧间载体六自由度的位置姿态变化速度。为了考察光流及解耦分量在不同相对运动场景下的变化规律,本文选取了KITTI数据集的两个典型场景给出不同载体运动状态下的光流场。如图2左侧,是KITTI序列2第3、4帧间运动下的光流场,该场景以载体快速前向运动为主,旋转运动较小。与之对比,图2右侧,是KITTI序列2第45、46帧间运动下光流场,该场景以载体低速转向为主,平移运动较小。图2(a)左右光流场中的每个光流矢量均以蓝、绿点为起、终点,箭头指向光流场方向,邻帧间的变化量即为位姿变化速度。
将光流矢量解耦为旋转(rotational)角速度分量ω(即旋转分量)和平移(translational)速度分量t(即平移分量),如图2(b)、(c),在左侧前向运动场景中,旋转分量光流较小且大小均一,平移分量光流大小不一随深度变化;在右侧旋转运动场景中,旋转分量光流较大且大小均一,平移光流大小不一随深度变化。可见,在不同相对运动状态下,光流场矢量受不同解耦分量影响差别显著。
将平移分量进一步解耦为载体沿世界坐标系三轴的3个位移分量,即t=[tx,ty,tz]T;将旋转分量进一步解耦为载体绕世界坐标系三轴的3个旋转角分量,即ω=[ωx,ωy,ωz]T,类似,在图中绘制出KITTI序列2第3、4帧间前向运动场景和序列2第45、46帧间旋转运动场景下解耦的六自由度分量光流,如图2(d)—(i)所示。
从图2(d)—(i)左右场景对比可见,左侧前向运动场景的3个旋转分量光流较小,右侧旋转运动场景的ωx,ωz分量光流较小,ωy分量光流较大;左右两场景中3个平移分量光流中tx、ty两个分量的光流均较小,tz分量光流大小随深度变化。可见,光流矢量受6个不同分量大小的影响也是显著不同的。
2 解耦光流运动场误差模型与仿真
2.1 解耦光流运动场误差模型
1.2节中定性分析了不同光流分量的特点,本节通过模型推导分析各分量误差对模型估计的影响。由式(1)可知,不失一般性,可以令其中f=1,记为式(2)
(2)
令ρ=1/Z,即逆深度,将式(2)右侧等号两边简写为
(3)

图2 两个典型场景的光流场及解耦光流分量Fig.2 Flow fields and decoupled flow components in 2 typical scenes

(4)
式中
(5)
同时,令
(6)

2.2 单变量误差模型与仿真
2.2.1 单变量误差模型
下面考察单个位姿参数LSE及NLSE的数学形式,并作仿真比对:

(7)
(8)
(9)

(10)
(11)
(12)

(13)
(14)
(15)

(16)
(17)
(18)

(19)
(20)
(21)

(22)
(23)
(24)

(25)
(26)
(27)
2.2.2 单变量误差模型仿真
将2.2.1节中步骤(1)—(7)的单个位姿参数LSE及NLSE进行计算仿真,如图3所示。仿真图像特征点对应光流个数为300个,仿真3个旋转角(速度)分量为3(°)/s,误差为10%,即0.3(°)/s,即1-Δ=0.1;3个平移(速度)分量为1 m/s,误差10%,即0.1 m/s,即1-Δ=0.1;深度分量仿真中,前向tz方向行驶速度为50 km/h,帧率为10 Hz,另两方向的行驶速度为tx=0.1tz,ty=0.01tz。深度分量仅在特征光流为第50、100、150、200、250时存在,且误差为5%,即(1-Δ)/Δ=0.05。
图3中分别给出了7个变量包含误差时,一帧中300个特征的LSE与NLSE。

图3 单变量误差仿真Fig.3 Error simulation of single variable
从图3可见,单个变量的LSE会随着特征光流矢量所在图像坐标的不同而出现随机残差,将LSE归一化后,计算出单个变量的NLSE不再随特征光流所在坐标变化,而仅余下单个变量NLSE的残差,大小为Δ-1,即变量本身包含的误差,也就是说,最小二乘估计残差LSE中随特征点所在坐标产生的随机误差被很好地分离了。
2.3 组合误差模型与仿真
2.3.1 组合误差模型
2.2节是单个位姿变量包含误差情况下,将其LSE中随机残差进行归一化分离的数学推导和仿真验证。在实际计算中,7个变量一般不会仅单个存在误差,需要分析推导多变量存在误差的情况下,随机残差的分离方法。考虑采用去耦合的方法分离位置或姿态分量部分随图像坐标产生的随机残差。考虑到式(5)、式(6),令
(28)
为解耦的归一化最小二乘残差(decoupled normalized least square error,DNLSE1),令
(29)
为DNLSE2。考察不同组合位置姿态参数包含误差条件下的DNLSE的数学形式:

(30)

(31)

(32)
(33)
2.3.2 组合误差模型仿真
下面将组合位姿参数在2.3.1节中(1)—(4)不同情况下的LSE、NLSE、DNLSE进行了计算仿真,如图4所示。仿真的图像特征点对应光流个数为300个,仿真的3个旋转角(速度)分量为ω=[1°,5°,0.5°]T,误差为5%,即1-Δω=0.05;3个平移(速度)分量的仿真中,前向tz方向行驶速度为50 km/h,帧率为10 Hz,3个平移(速度)分量为t=[0.1tz,0.01tz,tz]T,误差5%,即1-Δt=0.05;深度分量仅在特征点对应光流为第50、100、150、200、250时存在,误差为8%,(1-ΔZ)/ΔZ=0.08。

图4 组合变量误差仿真Fig.4 Error simulation of combined variables
从图4可见,组合变量存在误差时,LSE随着特征光流矢量所在图像坐标的不同而出现随机残差;组合变量的NLSE能够分离大部分这些随机误差,但并不能完全分离;组合变量的DNLSE计算结果不再随特征光流所在坐标变化,而仅余下各组合变量本身的误差部分,这说明组合变量存在误差情况下,利用DNLSE模型时,最小二乘估计残差中随特征点所在坐标的部分残差能够被很好地分离。表1将不同组合变量存在误差时可采用的DNLSE模型列出,“√”表示可分离的误差类型。误差种类不同时,DNLSE的计算式不同。利用DNLSE1模型能够在无旋转分量误差的条件下,较好地分离平移分量和深度误差中光流在图像坐标引入的随机残差部分;利用DNLSE2模型能够在无平移分量和深度误差的条件下,较好地分离旋转分量光流在图像坐标引入的随机残差部分。

表1 组合变量误差分离采用的DNLSE模型
2.3.3 组合误差分离试验
2.3.3.1 仿真数据试验
将2.3.2节中情况(1)“仅平移分量存在误差,旋转分量与深度无误差,利用DNLSE1计算”的过程,即图4第1组仿真,在本次试验中用图像光流场的误差条(ErrorBar)形式给出LSE和DNLSE计算结果的对比。如图5(a),光流矢量起点的红色“工”形误差条的高度代表该光流矢量LSE残差大小,经过DNLSE1模型的误差分离,在图5(b)中,光流矢量起点的绿色“工”形误差条高度明显降低,说明LSE中的残差被显著分离。
2.3.3.2 真实数据试验
将2.3.2节表1列出的(2)、(4)情况对真实数据进行误差分离计算过程试验,以期用尽量少的计算次数覆盖所有误差的分离。试验中对KITTI数据集序列2第3、4帧与序列2第45、46帧,分别用DNLSE1、DNLSE2模型进行计算,结果如图6。图6中(a)、(c)、(e)是序列2第3、4帧的高速前向运动场景,(b)、(d)、(f)是序列2第45、46帧的慢速旋转场景。图6(a)、(b)给出了计算出的LSE模型误差,以红色误差条显示,图6(c)、(d)是计算出的DNLSE1模型误差,以绿色误差条显示,图6(e)、(f)是计算出的DNLSE2模型误差,以蓝色误差条显示。
仔细对比图6(a)、(c)的前向运动场景和图6(b)、(d)的旋转运动场景,均可见图6(c)、(d)的部分绿色误差条分别比图6(a)、(b)的红色误差条反而高(如:图6(a)、(b)黄色箭头和图6(c)、(d)红色箭头对应的几个光流矢量误差条),这是DNLSE1显著分离LSE中的随机误差之后,暴露出了真实数据中存在着的一定旋转误差,即两场景下均有点DNLSE1>LSE,图6中所有该情况的特征光流编号统计结果见表2。类似,对比图6(a)、(e)可以看到图6(e)的部分蓝色误差条比图6(a)的红色误差条反而高(如:图6(a)蓝色箭头和图6(e)红色箭头对应的光流矢量误差条),这是DNLSE2显著分离LSE中的随机误差之后,暴露出了真实数据中存在着的一定平移和深度误差,即前向运动场景下有点的DNLSE2>LSE,图6中所有该情况的特征光流编号统计结果见表2。但是对比图6(b)和图6(f),从中观察和试验统计结果都得到蓝色误差条比红色误差条高的数量为0,即旋转场景中无点DNLSE2>LSE,这说明DNLSE2显著分离LSE中的随机误差之后,由于场景中的平移分量很小,因此没有残余显著的平移和深度误差。

表2 “图6”试验统计结果
3 解耦光流运动场双目视觉里程计位姿优化算法
在完成了组合误差分离的真实数据试验后,本文针对真实车辆运行时利用序列图像进行载体位姿估计的问题设计实现了解耦光流运动场双目视觉里程计位姿优化算法,并利用KITTI集的多个序列进行了解算试验。本文采用了双目视觉里程计先进行载体位姿初值的估计,然后利用解耦光流运动场误差模型进行图像位置随机误差的分离,并对残留位姿误差作进一步优化,以使载体位姿的估计精确化。
3.1 双目视觉里程计初始化
在双目视觉里程计初始估计的实现中,本文采用了文献[19]算法并对模板滤波作了改进,提升了计算效率(以下称Badino算法)。具体的初始化计算过程如下:对于第1帧,计算左图的Harris角点以固定特征点数(1024个),然后计算这1024个点的偏差量,将有效的偏差结果保存到特征矢量;对于第2帧,利用光流跟踪这1024个特征点,去掉跟踪失败的点后得到这些点新的像素坐标,同时再次计算Harris角点以补足至1024个点,同样计算这1024个点的偏差量,结果存入特征矢量。接下来,利用前后两帧的特征矢量计算位姿变化。首先选择在两帧中均计算出有效偏差的对应点对,将上一帧的三维点坐标进行帧间转移矩阵变换,得到当前帧的局部坐标,然后投影到当前图像中,与当前图像中的特征点位置进行比较,结果越小的越好。这一过程不断迭代,每次迭代后仅保留重投影误差较小的点对,抛弃误差较大的点对,并且每个点对的权重反比于投影误差。最后对结果进行卡尔曼滤波,滤波后的结果作为双目VO的估计初值。
3.2 解耦光流运动场的位姿优化算法
在具备了双目VO估计的位姿初值和前后帧对应的初始特征内点集后,利用当前内点集的重投影误差最小化迭代估计旋转位置变化量[19-20],直至重投影误差小于一定阈值或迭代次数超限,接着对式(5)利用DNLSE1进行图像中光流位置引入的随机误差分离和显著旋转误差的外点去除。
接着,固定前一轮估计出的旋转变化量,利用当前特征内点集的重投影误差最小化迭代估计位置变化量,直至重投影误差小于一定阈值或迭代次数超限,接着对式(5)利用DNLSE2进行图像中光流位置引入的随机误差分离和显著平移深度误差的外点去除。算法流程见图7。
4 试验与分析
为验证本文算法的有效性和计算精度,利用KITTI数据集序列00、02分别进行了算法解算试验。试验平台为LenovoX240s(CPU酷睿i7-4510U,2.00 GHz×4核,内存8 GB)笔记本电脑,本文所有试验都在Ubuntu14.04系统下,利用Matlab2014b、MexOpenCV2.4、C++11语言混合编程实现。
利用KITTI数据集的00序列和02序列的第0帧至第1200帧进行算法试验,绘制的二维轨迹如图8。图8给出的是位置分量t=[tx,ty,tz]T中的tx和tz分量,其中tz沿世界系Z轴指向载体前向运动方向,tx沿世界系X轴指向载体右侧横向运动方向,ty指向载体重力方向。图中红色轨迹为KITTI数据集给出的轨迹真值,蓝色轨迹为Badino算法的计算结果,绿色为本文提出的位姿优化算法进行计算的轨迹结果。
图9为两种算法解算tx、tz方向的误差对比,具体统计结果见表3。从统计结果可见,本文算法较好地分离了初始化计算结果中仍然存在的特征光流位置随机误差,以及平移、旋转、深度分量的残差,明显减少了Badino算法的累积误差。

表3 Badino算法与本文算法误差统计

图5 2.3.2节(1)计算结果对比Fig.5 Computation results comparison of (1) in section 2.3.2

图6 两类场景真实数据组合误差分离试验Fig.6 Combined error separation experiments using data of two real scenes

图7 解耦光流运动场的位姿优化算法流程Fig.7 Pose estimation algorithm for optical flow-decoupled motion field model
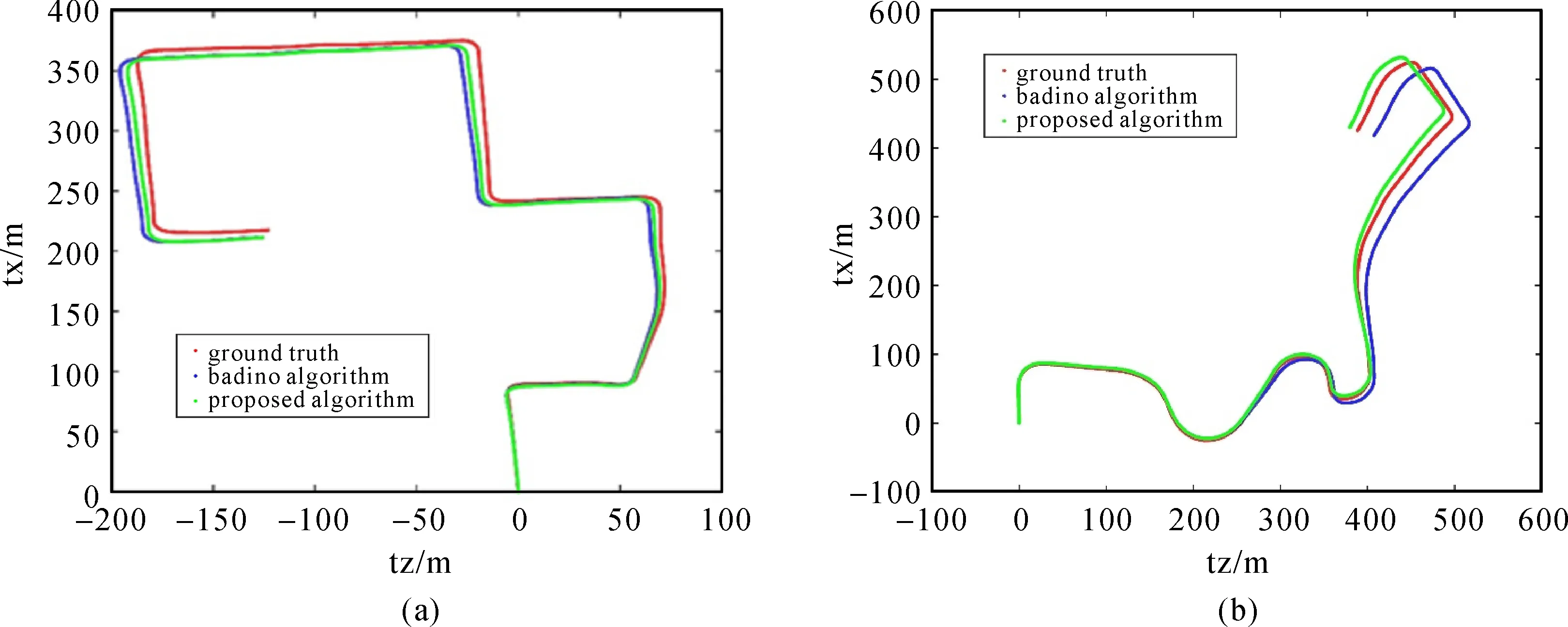
图8 解算轨迹对比((a) 序列00,(b) 序列02)Fig.8 Comparisons of calculated trajectories ((a) sequence 00, (b) sequence 02)

图9 解算误差对比((a) 序列00,(b) 序列02)Fig.9 Comparisons of calculation errors ((a) sequence 00, (b) sequence 02)
图10统计对比了序列00与序列02每帧计算中利用Badino算法完成初始位姿估计部分所耗费时间和完成本文算法精度优化部分所耗时间。统计结果可见,本文提出算法部分的耗时相对初始化位姿估计部分耗时增加不多或几乎没有增加,计算效率与原算法基本相当,能够用于多种低功耗嵌入式计算场合。
5 结 论
本文利用图像中光流矢量与载体位置姿态变化速率之间的模型关系——光流运动场模型,将光流矢量解耦到对应的六自由度载体位姿变量,考察解耦后的光流矢量与单个、组合载体位姿变量误差之间的关系,推导出利用NLSE分离LSE中的光流矢量位置随机误差,利用DNLSE进一步分离组合变量下NLSE中的光流矢量位置随机误差,并利用仿真和真实数据进行了试验验证。在双目视觉里程计算中,利用本文提出的解耦光流运动场位姿优化算法,既能够分离光流矢量位置的随机误差,同时能够通过外点剔除减少DNLSE1和DNLSE2模型计算后残留的平移、深度、旋转角度残差。试验表明,算法将载体横向平移平均误差由4.75%降低至2.2%,误差平均降低了53.6%;将载体前向平移平均误差由2.2%降低至1.9%,误差平均降低了15.4%。算法在明显减少双目视觉里程计位置姿态估计中的累积误差的同时计算效率与原算法相当,适用于嵌入式低功耗实时位置姿态估计和组合导航系统的位姿初值获取。在计算量允许的条件下,还可接续进行SLAM图优化算法,预计能够进一步降低整体位置姿态估计误差。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
湖北工业大学学报(2016年5期)2016-02-27
中北大学学报(自然科学版)(2014年3期)2014-11-22
中国铁道科学(2014年6期)2014-06-21
